Cenários Dinâmicos¶
Cenários Dinâmicos são executados usando simulações microscópicas, mesoscópicas ou híbridas baseadas em veículos. Eles podem ser executados com caminhos gerados externamente pelo modelador, por outro cenário (Static ou DUE), ou podem usar caminhos baseados em custos experimentados na rede durante a execução da simulação.
O requisito mínimo para um Cenário Dinâmico é uma rede de transporte base e um Demanda de Tráfego. Há opções para um Plano de Alocação de Caminhos, um Plano de Transporte Público, um Plano Mestre de Controle e conjunto de Configurações de geometria a ser incluído no cenário e o Saída de dados opções, Ações de Gerenciamento de Tráfego, e Conjuntos de dados reais também pode ser especificado para o cenário.
Experimentos dinâmicos, em simulações mesoscópicas, microscópicas e híbridas, também podem ser executados usando múltiplas threads no computador host para acelerar a execução.
Para criar um novo cenário dinâmico, no menu de contexto do cenário, selecione Novo -> Cenário Dinâmico.
O menu de contexto do Cenário tem opções para Ativar, crie um Novo Experimento, execute um dos disponíveis Scripts, Excluir, Renomear, Duplicar ou abra o Cenário Propriedades editor.
Ao selecionar Ativar a partir de um cenário, o primeiro experimento disponível no cenário é ativado automaticamente.
Editor de Cenário Dinâmico¶
O editor de cenário é dividido em várias abas que descrevem quais são as entradas do processo, os resultados a serem coletados, as variáveis usadas para modificar o cenário e alguns parâmetros para descrever o cenário.
Aba Principal¶
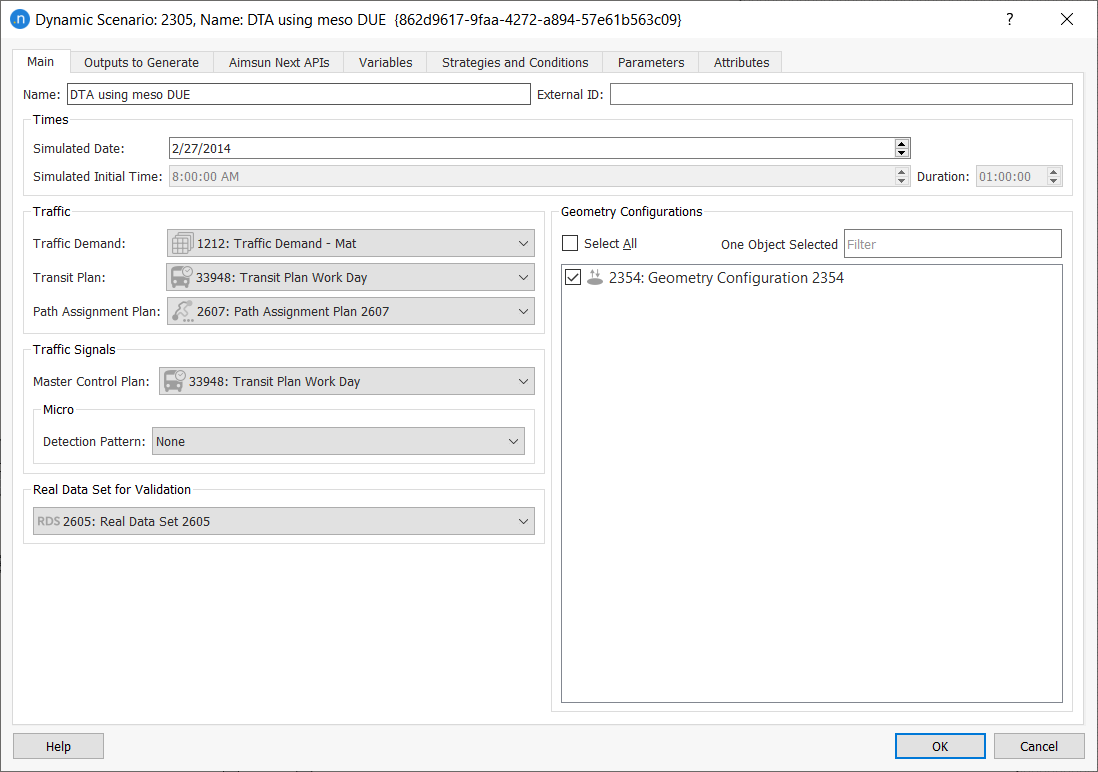
Os parâmetros do cenário, que serão os padrões para os experimentos neste cenário, são:
- O nome e o ID externo do cenário:
- O tempo e a duração da simulação: Observe que a data é informativa e não é usada pela simulação.
- As informações de Tráfego que consistem em:
- A Demanda de Tráfego com qualquer um dos matrizes OD ou um conjunto de Estados de Tráfego. Isto já deve existir no documento Aimsun para todo o modelo, ou, se este cenário estiver contido em uma sub-rede, o plano de demanda também deve estar contido na pasta da sub-rede para o projeto.
- A Plano de Transporte Público com um conjunto de rotas e horários de transporte público.
- A Plano de Alocação de Caminhos com um conjunto de rotas derivadas de experimentos anteriores. O plano de atribuição de caminhos deve cobrir toda a duração da demanda de tráfego. Caso contrário, a simulação será cancelada. Lacunas no plano de atribuição de caminhos também não são permitidas.
- A Plano Mestre de Controle que define os sistemas de controle semafórico para o cenário.
- A Padrão de Detecção. Este é um registro das detecções de veículos feitas por detectores de via a partir de uma simulação anterior. Sua função principal é testar planos de controle adaptativo trazendo os dados de detecção sem necessariamente exigir a demanda de tráfego que produziu os dados. Observe que, se um Detection Pattern for criado a partir de um Detection Template e de uma simulação em execução, ele deverá ser especificado no Cenário que possui essa simulação.
- A Conjunto de Dados de Validação: Estes são dados usados para comparar saídas da simulação com dados observados.
- Um conjunto de Configurações de geometria: Estas são as variações na rede aplicadas a este cenário.
Aba Saídas a Gerar¶
O Saídas a Gerar aba na caixa de diálogo do cenário detalha quais saídas são geradas pelos experimentos no cenário.
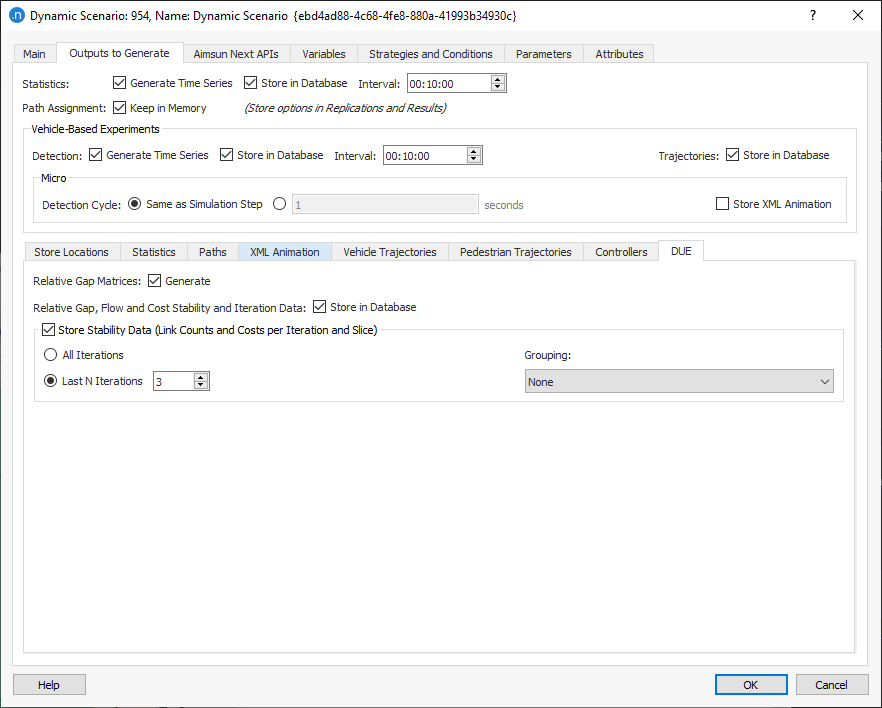
Os detalhes dessas abas e opções de saída estão documentados na Saídas do cenário dinâmico seção.
Aba API¶
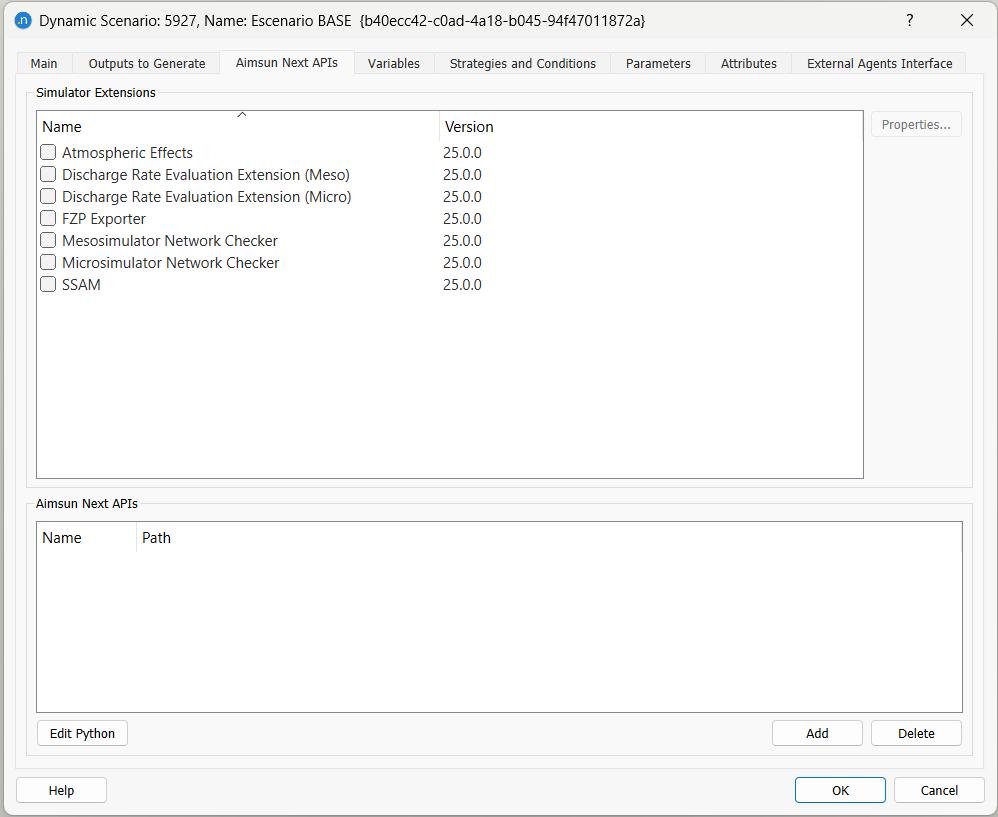
Uma API do Aimsun Next é uma biblioteca externa que o usuário pode criar para acessar as informações do simulador online durante a simulação e modificá-las ou verificá-las conforme necessário. Consulte o Seção do Manual da API do Aimsun Next para mais detalhes.
Nesta pasta, as extensões de simulador disponíveis também são listadas e podem ser selecionadas para serem usadas na simulação. Clique duas vezes em qualquer uma das extensões de simulador ou selecione-a e pressione o Propriedades botão na parte direita da caixa de diálogo para abrir a caixa de diálogo específica da API correspondente, onde os parâmetros desse módulo podem ser definidos.
As Extensões do Simulador incluem o seguinte:
- Verificador de Rede do Microssimulador
- Verificador de Rede Mesoscópica
- Extensão de Efeitos Atmosféricos
- Extensão de Avaliação da Taxa de Descarga (micro e meso)
- Extensão do Exportador FZP
- Extensão SSAM
- Extensão de agente externo (esta extensão não está listada na lista Simulator Extensions na pasta da aba API, pois possui sua própria pasta de aba)
Observe que, para poder carregar as APIs do Aimsun Next, é necessária uma licença da API do Aimsun Next.
Aba Variáveis¶

O variáveis que serão usadas ao simular qualquer replicação deste cenário podem ser definidas nesta pasta. Observe que essas variáveis também podem ser definidas no nível do experimento e, nesse caso, o valor será obtido do experimento. Quando uma simulação é iniciada, as variáveis recebem seus valores procurando primeiro no experimento e, se nenhum valor estiver definido nesse nível, então no cenário.
Uma variável é uma string arbitrária que começa com o sinal de dólar: $speed e $demand são exemplos de variáveis válidas. Variáveis podem ser usadas em itens de demanda de tráfego, em políticas, em gatilhos etc.
Por exemplo, uma demanda de tráfego pode usar um fator variável $DemandFactor. Essa demanda é atribuída a um cenário que contém dois experimentos, um com valor 1 e outro com valor 1.1 para a variável. Quando uma replicação é selecionada para ser simulada, o simulador atribui as variáveis aos seus valores finais. Ele procura primeiro no experimento que contém a replicação. Se a variável for encontrada ali, o simulador então usa esse valor; caso contrário, procura no cenário que contém o experimento. Se nenhum valor for encontrado em nenhum dos dois, um erro é emitido na janela de log. Neste exemplo, a segunda replicação será executada com uma demanda 10% maior.
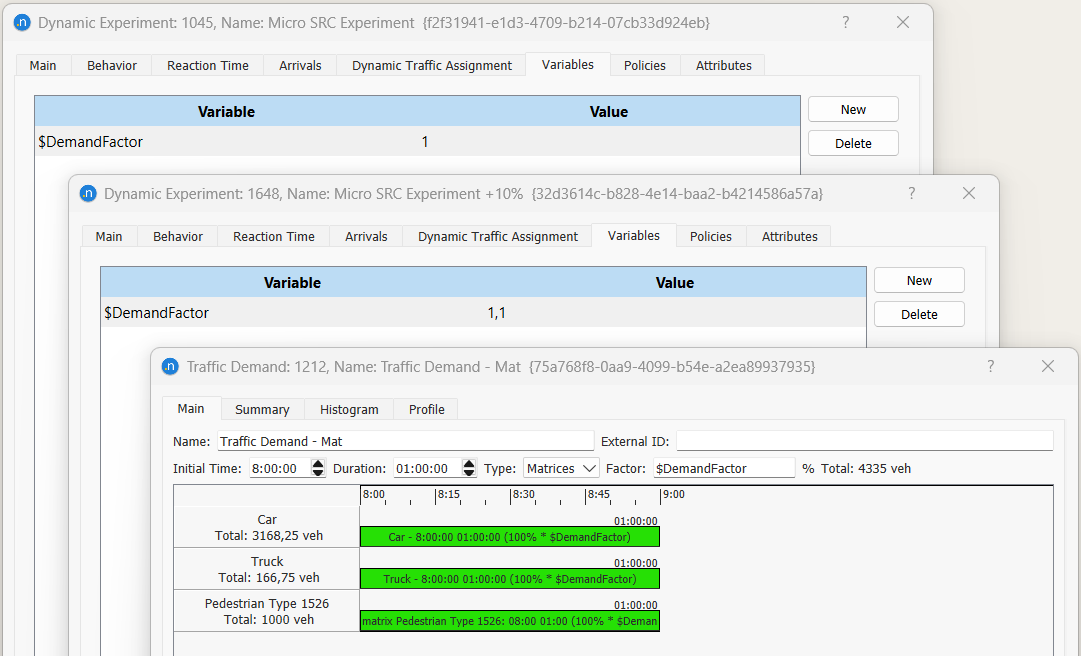
O uso de variáveis permite que os mesmos dados de entrada sejam usados com diferentes variações em cada cenário e/ou experimento, sem replicar ou manipular cópias dos dados originais.
Da mesma forma, o nível de conformidade das ações de gerenciamento de tráfego pode ser definido usando uma variável e uma taxa padrão definida pelo cenário, mas variada em cada um dos experimentos.
Aba Estratégias e Condições¶
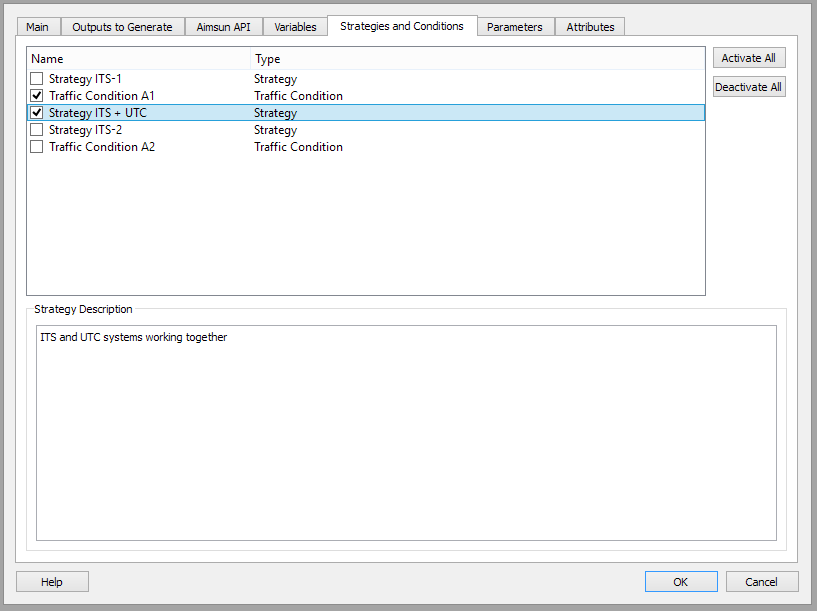
Esta aba apresenta uma lista com todas as estratégias e condições de tráfego definidas no modelo. Aquelas que estiverem marcadas na lista serão consideradas na simulação deste cenário. Além disso, para cada estratégia ou condição de tráfego, você pode adicionar uma descrição na caixa de texto Strategy Description abaixo.
Consulte o Gestão de Tráfego seção para obter mais informações sobre o uso de estratégias.
Aba Parâmetros¶
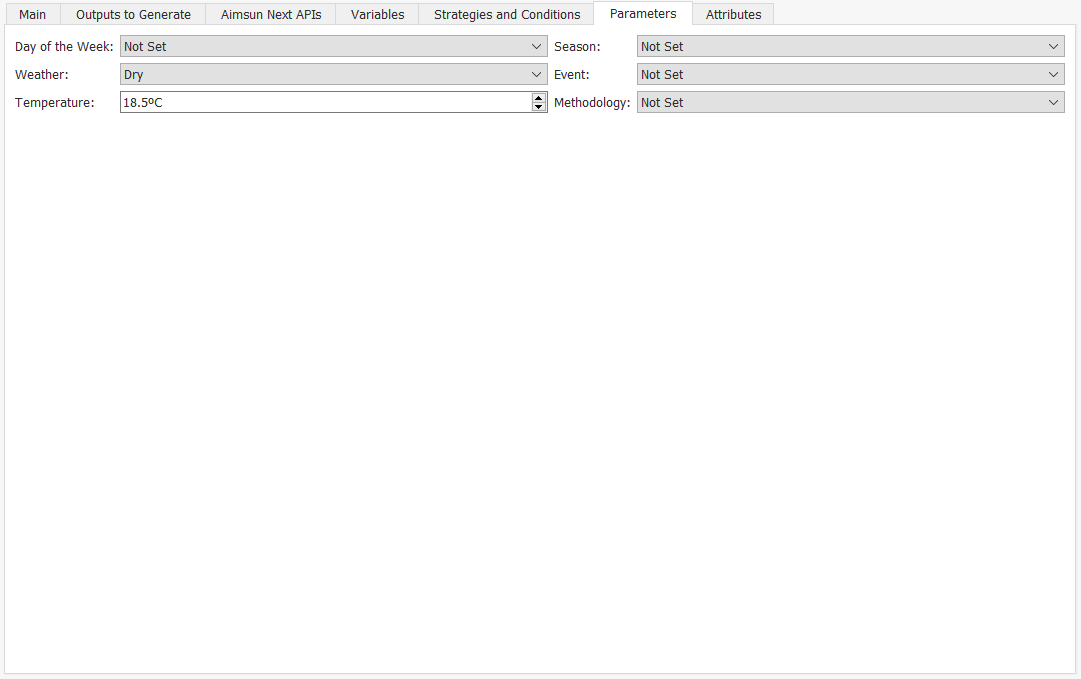
Nesta aba, você pode selecionar informações sobre o cenário a partir de seis campos, todos eles listas suspensas, exceto Temperature:
- Dia da semana
- Estação
- Meteorologia
- Evento
- Temperatura (o intervalo é de -15°C a 20°)
- Metodologia
Exceto por Weather e Temperature, essas informações são puramente descritivas e não são usadas na simulação. Weather é usado se o modelo MFC estiver ativado para qualquer veículo (para mais informações, consulte modelo MFC). A temperatura é usada pelo Battery Consumption Model quando ele está ativado para qualquer veículo (para mais informações, consulte modelo de Consumo de Bateria).
Aba Interface de Agentes Externos¶
A External Agent Extension está documentada aqui.
Experimentos¶
Um Experimento é o objeto que personaliza e executa um cenário de simulação. Vários experimentos podem ser criados para um cenário.
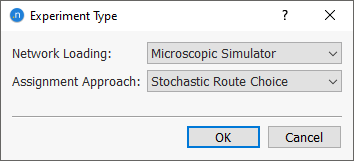
Para criar um novo experimento, no menu de contexto do cenário, selecione Novo Experimento e selecione o método de simulação: meso, micro, híbrido meso–micro ou híbrido macro–meso, e o método de atribuição SRC ou DUE.
O menu de contexto do Experimento tem opções para Ativar, crie um Nova replicação ou Novo resultado, execute um dos disponíveis Scripts, Excluir, Renomear, Duplicar ou abra o Cenário Propriedades editor. Ao selecionar Ativar a partir de um experimento, ele é ativado na área da barra de ferramentas de tarefas.
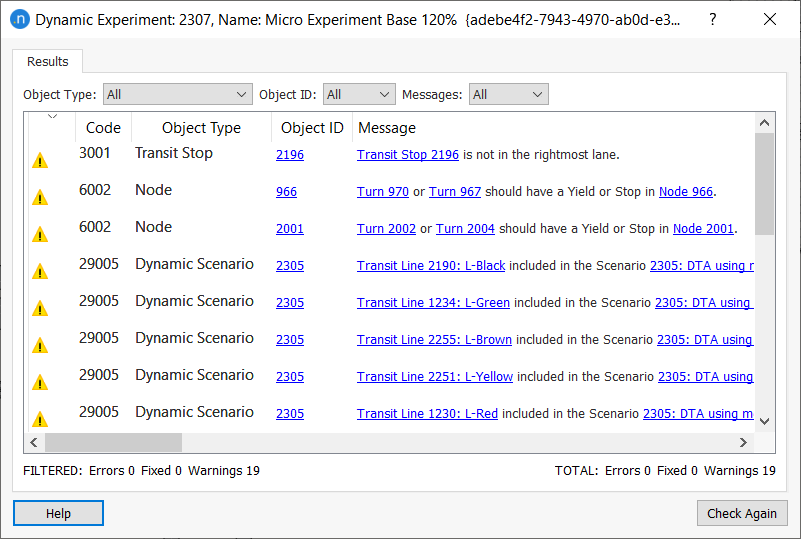
O Verificar e corrigir experimento opção é usada para verificar o modelo e as condições do experimento. Clicar nos hiperlinks do relatório abrirá o editor de propriedades do objeto relevante, onde o problema poderá ser corrigido.
O Marcar Locais de Gerenciamento de Tráfego a opção identifica aqueles locais onde gerenciamento de tráfego ações estão em vigor. Isso pode ser filtrado por hora do dia para focar em ações específicas.
O menu de contexto também tem opções para executar o experimento. Para um experimento dinâmico, isso primeiro requer que Replicações e Médias sejam adicionadas a ele.
Editor de Experimento Dinâmico¶
O editor Dynamic Experiment tem várias abas; sua presença ou ausência depende do tipo de experimento. As abas são:
- Aba principal: Comum a todos os tipos de experimento dinâmico, a opção DUE inclui parâmetros de convergência da alocação.
- aba Comportamento: Isto inclui parâmetros de comportamento de car-following, mudança de faixa e formação de filas em experimentos micro, parâmetros de comportamento simplificados em experimentos meso e híbridos macro–meso, e todos em experimentos híbridos meso–micro.
- aba Tempo de Reação: Isto inclui configurações de tempo de reação para comportamento micro e meso, ou ambos em experimentos híbridos meso–micro.
- Aba Híbrido: Isto é específico apenas para experimentos híbridos (meso–micro ou macro–meso).
- Aba Dynamic Assignment: Isto é específico para experimentos com uma demanda de tráfego baseada em matrizes OD. Dependendo do tipo de experimento, a subaba Stochastic Route Choice ou Dynamic User Equilibrium também está presente.
- Chegadas, Variáveis, Políticas, e Atributos abas: Estas são comuns a todos os tipos de experimento.
Aba Principal¶
A aba Main é usada para selecionar qual simulador de pedestres usar (se relevante), para definir o Estado inicial da simulação parâmetros, para incluir ou excluir qualquer Substituições de Atributos, para especificar Configurações de Desempenho, e selecionar qualquer scripts Pre-Run ou Post-Run necessário para dar suporte à simulação.
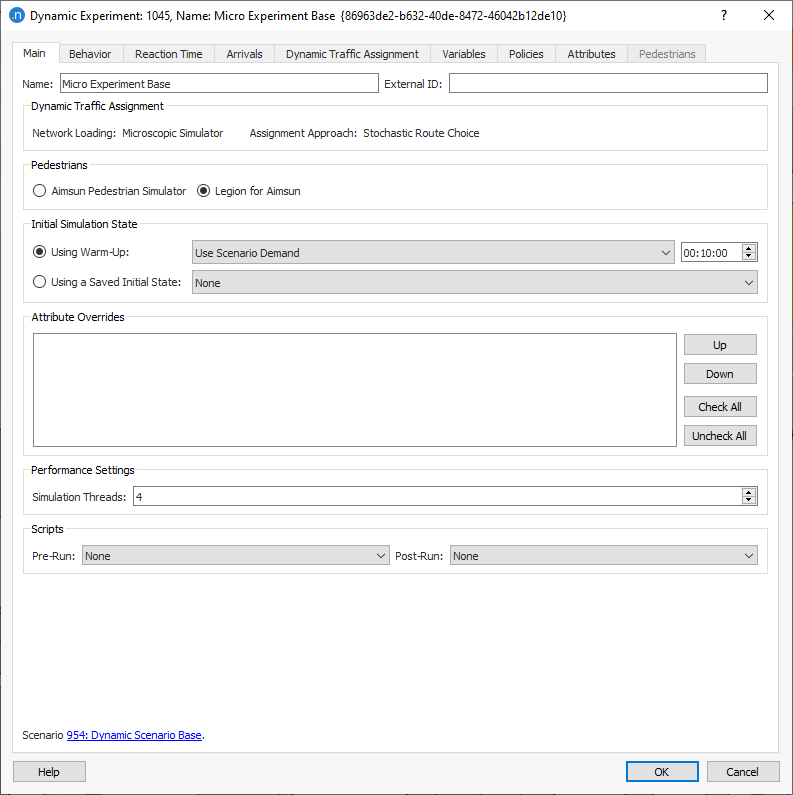
Atribuição Dinâmica de Tráfego¶
Este painel de informações descreve o método de carregamento da rede (por exemplo, micro, meso, híbrido etc.) e a abordagem de atribuição (por exemplo, escolha estocástica de rota ou atribuição dinâmica de usuários).
Pedestres¶
Se sua simulação modela pedestres, verifique nosso Simulador de Pedestres para mais informações sobre ele.
Estado inicial da simulação¶
O estado inicial da simulação aborda um problema na microssimulação, na simulação híbrida e na simulação mesoscópica em que, no início da simulação, a rede está vazia de veículos e, portanto, não representará as condições de tráfego até que os veículos estejam em todas as etapas de suas viagens, incluindo a chegada aos seus destinos. O estado inicial da simulação carrega a rede executando a simulação por um período de aquecimento ou carregando um snapshot de veículos de uma simulação anterior. As opções para carregar a rede antes do início da simulação são:
-
Selecione um aquecimento período. As opções são usar a Demanda do Cenário ou outra Demanda de Tráfego para definir a demanda durante um período de aquecimento (que deve ser comparável às viagens mais longas na rede de tráfego para permitir que os veículos cheguem aos seus destinos). A Scenario Demand é considerada igual à definida na primeira fatia de tempo do cenário.
-
Selecione um Estado Inicial salvo anteriormente.
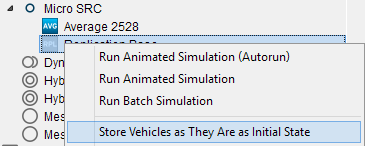
- Um estado inicial pode ser obtido a partir de uma simulação que armazena os veículos em um horário escolhido. Para armazenar um estado inicial, interrompa a simulação e use o menu de contexto para armazenar o estado. Os estados são armazenados no Projeto: Dados de demanda: Estados iniciais pasta e podem ser renomeados para identificá-los. Também é possível armazenar automaticamente um estado inicial em um horário predefinido durante a simulação.
- Em uma simulação mesoscópica, pode ser usado um estado inicial derivado de uma simulação mesoscópica anterior. Neste caso, somente a opção automática está disponível. Consulte o estado inicial mesoscópico seção para mais detalhes.
Durante o período de aquecimento, a simulação usa controles semafóricos de acordo com o master control plan quando ele cobre o aquecimento. Se o master control plan não estiver definido antes do horário de início da simulação, então os controles semafóricos definidos para o primeiro período da simulação serão usados. No entanto, o aquecimento do transporte público exige um plano de transporte público que se estenda para trás até o período de aquecimento para gerar ônibus nesse intervalo.
Substituições de Atributos¶
O Substituições de Atributos da Rede definidos no projeto são listados. Aqueles aplicáveis a este experimento podem ser selecionados aqui e a ordem em que são aplicados pode ser editada.
Configurações de Desempenho¶
O Aimsun Next oferece a possibilidade de aproveitar ao máximo a potência do computador quando ele tem mais de uma CPU. Nesse caso, o Aimsun Next executa a simulação em paralelo, obtendo um melhor tempo de execução para cada execução de replicação. A escolha de rotas e a simulação dos movimentos dos veículos são os processos realizados com várias threads. O número padrão de threads a ser usado não excede o número máximo de threads na licença do software nem o número de threads suportado pelo computador em uso.
As características de desempenho não escalam necessariamente de forma linear com o número de threads e, em redes pequenas, a sobrecarga de usar threads para paralelizar os cálculos pode exceder os benefícios da paralelização. Em redes grandes, no entanto, o tempo de execução será reduzido.
Em simulações mesoscópicas, não há configurações de desempenho a serem definidas pelo usuário, pois sempre é usado o número mínimo de threads com base nos critérios listados abaixo: 1. número máximo de núcleos, 2. número máximo de threads permitido com base na licença adquirida, 3. número máximo de threads definido na linha de comando usando o parâmetro --force_number_of_threads, por meio do linha de comando.
Em simulações microscópicas e híbridas, apenas o número de Threads de Simulação pode ser definido manualmente no experimento com base no valor mínimo dos mesmos critérios.

As condições de licença padrão para as assinaturas anuais são que usuários com uma Aimsun Next Lite Edition podem usar até 2 threads, aqueles com uma Aimsun Next Pro Edition podem usar até quatro threads. Usuários com uma Advanced Edition podem usar até oito threads. E aqueles com uma Aimsun Next Expert Edition podem usar threads ilimitadas.
Scripts (Pré-Execução e Pós-Execução)¶
Scripts de pré-execução e pós-execução podem ser definidos para serem executados antes da execução de um experimento e após a execução de um experimento. Estes são configurados no Pré-execução e Pós-execução seletores.
Aba Híbrido¶
A aba Hybrid contém principalmente áreas a serem consideradas micro em um Híbrido Meso–Micro e meso em um Híbrido Macro–Meso. Observe o Aba Comportamento também inclui opções micro e meso, bem como as opções híbridas se for usado um experimento híbrido meso–micro.
Escopo da Microssimulação¶
A seção Microsimulation Scope é usada para especificar quais áreas de simulação devem ser microssimuladas no experimento. Há algumas regras predefinidas que podem ser usadas para adicionar mais seções e nós às áreas de microssimulação selecionadas nesta aba:
- Seções que terminam em nós com um Plano de Controle Semafórico Atuado.
- Seções que terminam em nós com um Plano de Controle Semafórico com Prioridade para Ônibus.
- Seções que apresentam uma Parada para qualquer Linha de Transporte Público em uso.
- Seções que terminam em nós com um Controlador e/ou um Detector controlado ou Travessia de Pedestres.
- Todas as Seções incluídas em qualquer Linha de Transporte Público em uso.
- Seções contendo um detector com detecção de Equipped Vehicles.
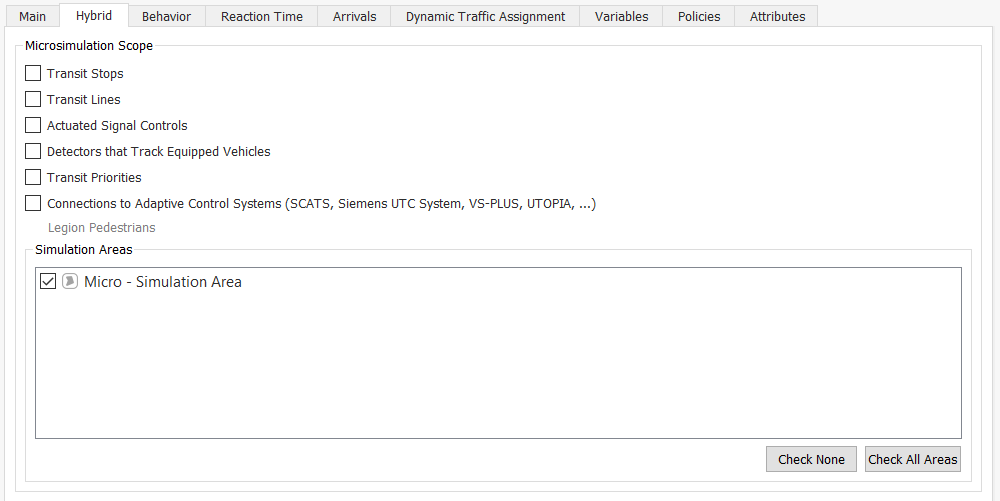
Em todos esses casos, são aplicadas as mesmas regras usadas ao considerar áreas de microssimulação. Se uma seção for definida para ser simulada como micro, então o nó de destino e, em seguida, todas as seções que terminam nesse nó também serão definidos para serem simulados como micro.
Escopo da mesossimulação¶
A seção Escopo da Mesossimulação é usada para especificar quais áreas de simulação devem ser mesossimuladas no experimento.
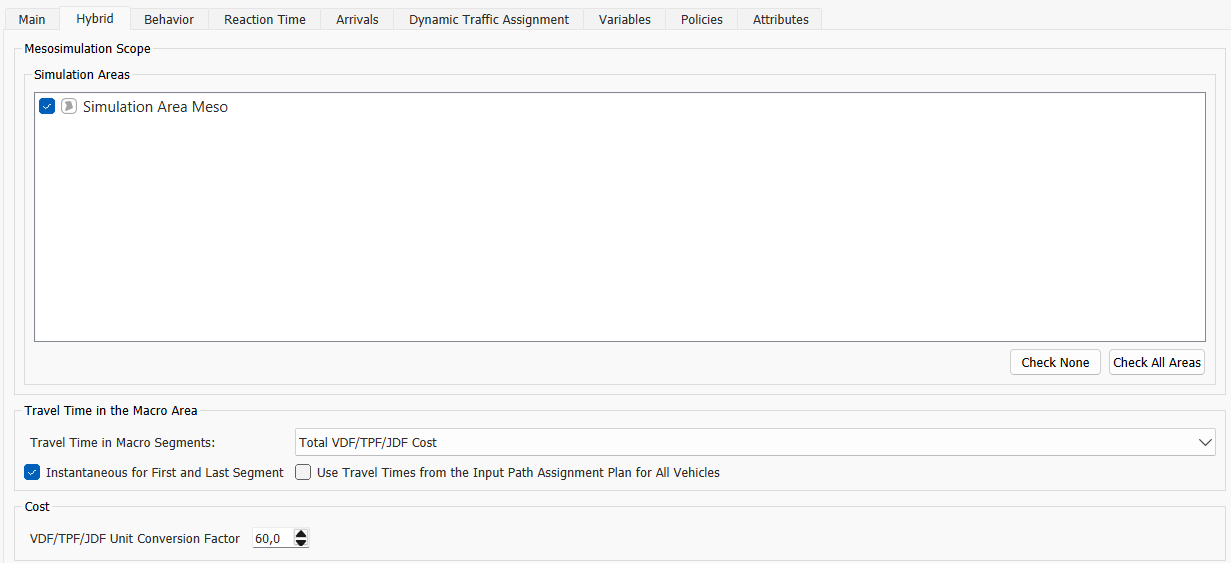
Outro parâmetros que precisam ser especificados:
- Tempo de viagem na Área Macro: há várias opções para calculá-lo:
- Custo Total VDF/TPF/JPF, em que o tempo de viagem para cada parte macro da viagem corresponde à soma dos valores dos custos macro em seções e movimentos de conversão.
- Function Component, onde o usuário selecionará um disponível componente de função que retorna tempos de viagem para seções e movimentos de conversão.
- Instantâneo para o Primeiro e o Último Segmento. Quando esta opção está ativada, se o primeiro e/ou o último segmento da viagem forem macro, os veículos aparecerão diretamente na primeira parte meso e desaparecerão imediatamente após a última parte meso da viagem, e o tempo de viagem para essas duas partes não será calculado.
- Usar Tempos de Viagem do Plano de Atribuição de Caminhos de Entrada para Todos os Veículos. Esta opção só aparece se o Cenário contém como entrada um Plano de Alocação de Caminhos. Por padrão, esta opção não estará ativa, o que significa que os custos macro são o resultado da avaliação das funções com os critérios atuais de escolha de rota (intervalo anterior em um experimento one-shot de escolha estocástica de rota). Caso contrário, os custos para todos os veículos seriam lidos do Path Assignment Plan. Esta segunda opção permite reproduzir a última iteração de uma DUE executando um experimento de escolha estocástica de rota, porém fixando 100% nos caminhos DUE de entrada. Ambas as opções garantem que todos os veículos estejam usando o mesmo método de avaliação de custos independentemente da origem de seus caminhos.
- Cost Conversion Factor para transformar as unidades das funções de custo Macro nas unidades usadas nas funções de custo Dynamic.
Aba Comportamento¶
O Comportamento guia controla o comportamento dinâmico dos veículos e é sensível ao contexto, dependendo do modo de simulação selecionado: micro, meso ou híbrido.
Comportamento Microscópico¶
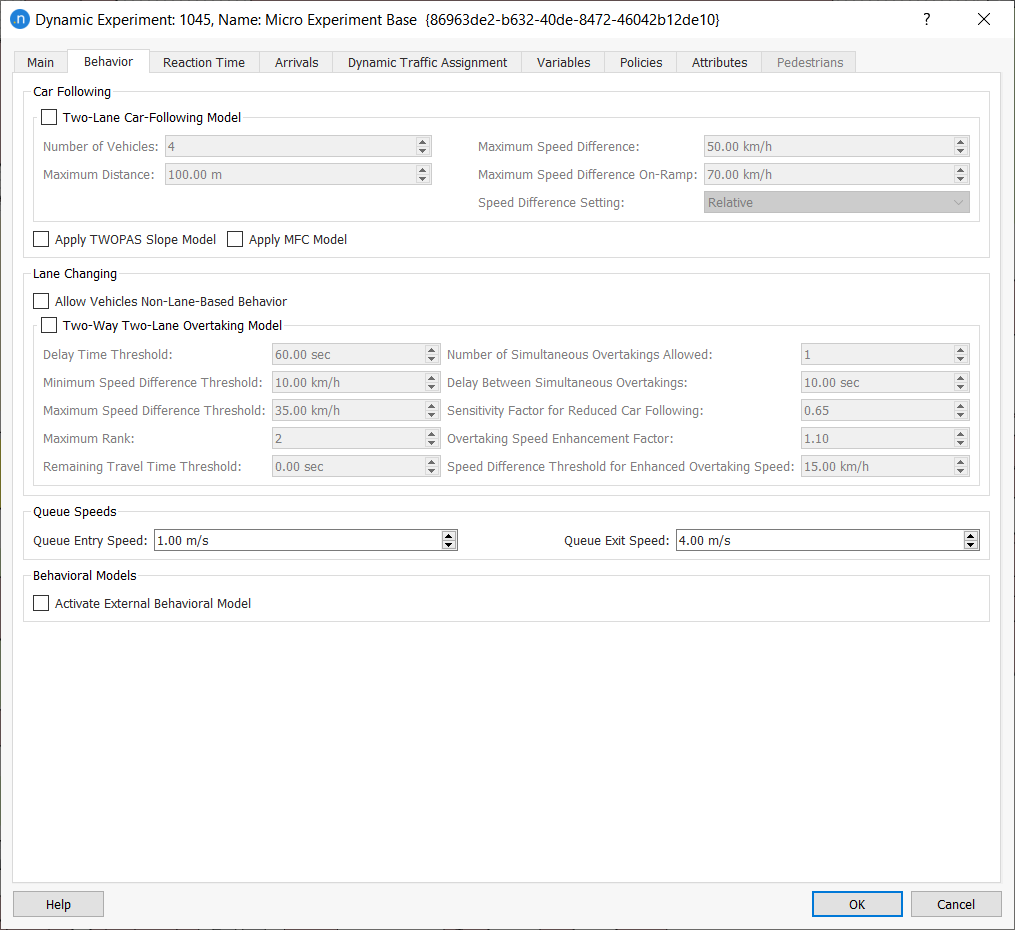
Nesta aba, você pode definir os parâmetros globais a serem usados no Modelo de seguimento veicular em duas faixas, o Modelo de Ultrapassagem Bidirecional de Duas Faixas, o Comportamento Não Baseado em Faixas e o Velocidades de Fila.
Você também pode optar por ativar o modelo de rampa TWOPAS cálculo ou o modelo MFC se qualquer um destes for necessário.
Em um experimento SRC, se a simulação deve considerar pedestres, você também pode ativar o Alocação Dinâmica de Transporte Público.
Além disso, quaisquer parâmetros para modelos comportamentais externos desenvolvidos usando o microSDK (que requer uma licença microSDK) serão incluídos aqui.
Comportamento Mesoscópico e Comportamento Híbrido Macro–Meso¶

Em um Experimento Mesoscopic ou Macro–Meso, apenas os modelos meso de mudança de faixa e meso de seguimento veicular são aplicáveis.
Comportamento Híbrido Meso–Micro¶
Em um experimento Híbrido Meso–Micro, no Comportamento guia a Parâmetros Híbridos seção está disponível para editar parâmetros que controlam o modelo mesoscópico, além dos parâmetros microscópicos aplicados nas áreas de microssimulação.

Aba Tempo de Reação¶
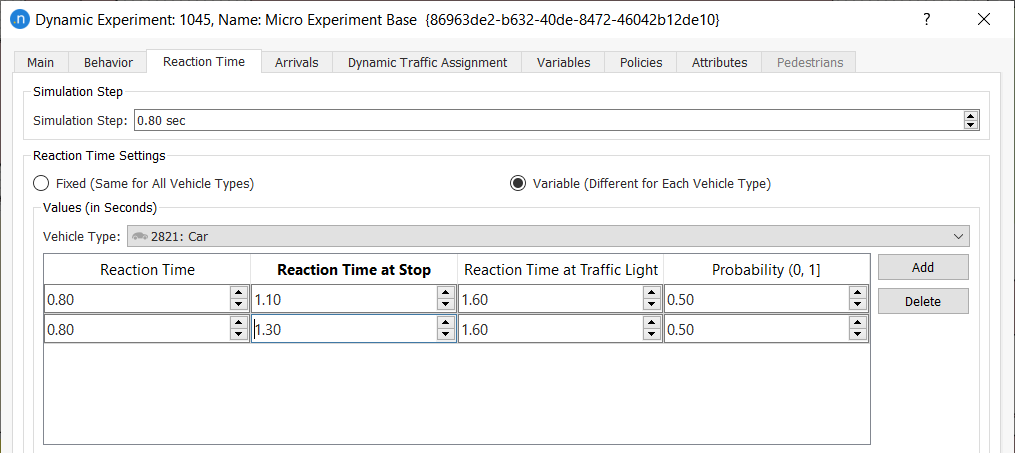
Esta aba define o passo de simulação para simulações micro e híbridas meso–micro e os tempos de reação, incluindo o tempo de reação em parada e o tempo de reação em semáforos para simulações micro, meso e híbridas. Consulte o Parâmetros globais de modelagem - Geral Seção para obter detalhes sobre o Tempo de Reação parâmetros.
O tempo de reação pode ser definido como Fixo, isto é, o mesmo que o passo de simulação ou como Variável. Quando Variável é escolhido, uma lista de tempos de reação para cada tipo de veículo pode ser definida selecionando o tipo de veículo e usando os botões de adicionar e excluir para criar um perfil de tempo de reação. Cada veículo define seus tempos de reação usando as probabilidades associadas ao perfil.
Aba Chegadas¶
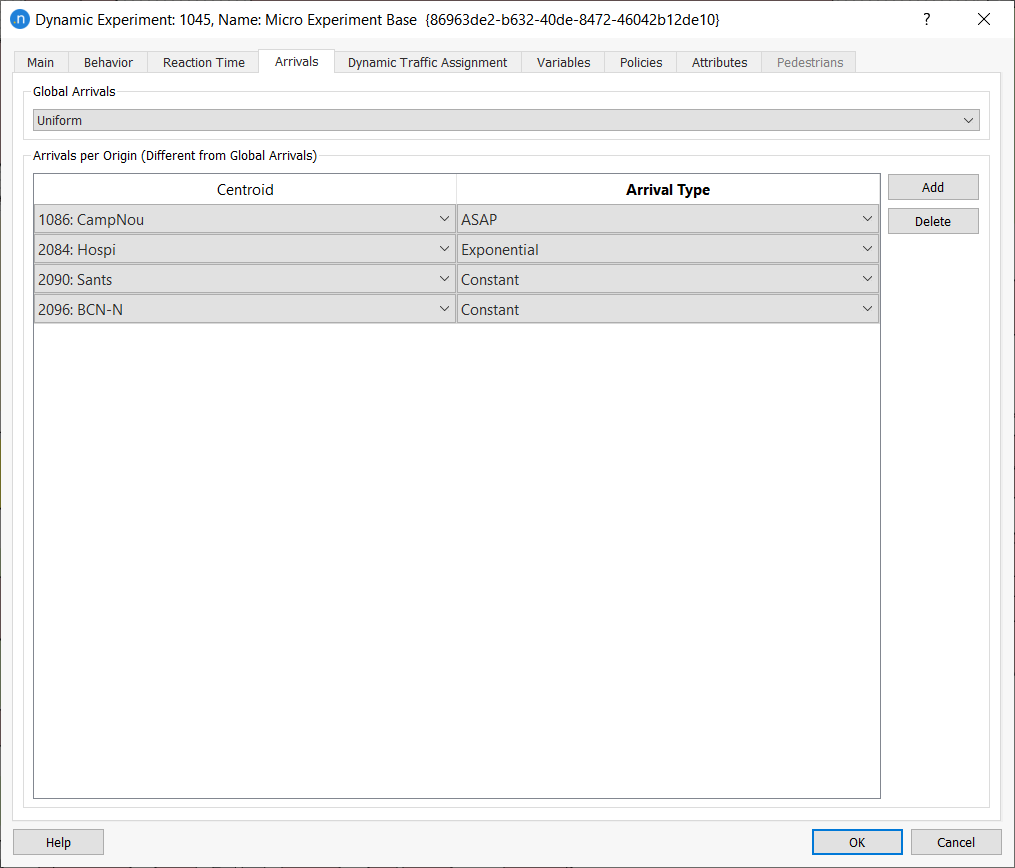
Esta aba controla o headway entre veículos consecutivos à medida que eles chegam aos pontos de entrada na rede. O Demanda de Tráfego define o número de veículos que chegarão em um período de tempo; os algoritmos de chegadas controlam como eles são distribuídos dentro desse período e o intervalo de tempo entre eles.
O intervalo de tempo entre duas chegadas consecutivas de veículos é amostrado a partir de uma distribuição aleatória; vários modelos de headway estão disponíveis:
O modelo de chegadas é definido para o experimento, mas pode ser sobrescrito para centroides individuais na demanda de tráfego OD, ou para seções individuais nas quais a demanda é controlada por estados de tráfego. Use os botões de adicionar e excluir para editar a lista de chegadas sobrescritas e selecione o centroide e o tipo de chegada nas listas suspensas.
Os detalhes dos tipos de chegada estão no Seção de Chegadas.
Aba Dynamic Traffic Assignment¶
-Captura de tela necessária, mas atualmente a UI tem três opções de custo de caminho, não as duas planejadas.A guia Dynamic Traffic Assignment especifica os parâmetros para a opção Stochastic Route Choice ou para a opção Dynamic User Equilibrium, dependendo do tipo de experimento escolhido.
Os parâmetros comuns às atribuições DUE e SRC são definidos nesta aba.
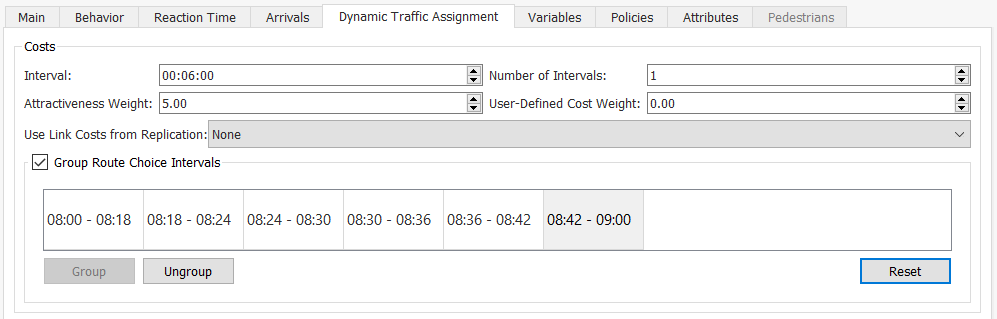
- Intervalo. Este parâmetro define o intervalo de tempo t usado no algoritmo de alocação dinâmica de tráfego e define o intervalo entre os recálculos do caminho mais curto.
- Número de intervalos. Quando a função de custo dinâmico de cada link é avaliada, os dados são derivados dos intervalos anteriores definidos pelo tempo de intervalo. O número de intervalos é configurável. Um valor de 1 significa que os tempos do link são obtidos apenas do intervalo anterior; valores mais altos usam dados de pontos mais anteriores no tempo simulado. Um tempo de intervalo curto e um número baixo de intervalos podem levar à instabilidade dos custos de caminho; um tempo de intervalo longo e um grande número de intervalos, à falta de responsividade a mudanças no congestionamento.
- Peso de Atratividade. Este é um parâmetro de peso de atratividade definido pelo usuário que permite ao usuário controlar a influência que a atratividade do link tem sobre o custo em relação ao tempo de viagem (veja seção de funções de custo de links)
- Peso de Custo Definido pelo Usuário. Este é um parâmetro de peso de custo definido pelo usuário que permite ao usuário controlar a influência que o custo da seção definido pelo usuário tem sobre o total custo do link.
Em um experimento DUE, você pode escolher um Custo do caminho parâmetro de Instantaneous, Experienced ou Time-Dependent.
- Instantâneo: os custos de caminho são calculados somando os custos dos links do caminho coletados ao longo do último n intervalos
- Experienciado: os custos dos caminhos são calculados usando o custo experimentado pelos veículos atribuídos ao caminho e que concluíram o caminho no último n intervalos.
- Dependente do Tempo: os custos dos caminhos são calculados usando o intervalo de tempo no qual o caminho utiliza cada link, o que depende do intervalo de partida em que um veículo foi gerado pela primeira vez na rede mais seu tempo de viagem acumulado até o link cujo custo está sendo calculado.
O cálculo de caminho mínimo dependente do tempo (TDSP) encontra a rota de menor custo de uma origem a um destino levando em conta o fato de que o custo para um veículo percorrer um link muda ao longo do tempo.
Este método é o inverso do cálculo do caminho mínimo instantâneo, no qual o custo do intervalo de partida é usado para todos os links no caminho.
O TDSP é mais indicado em redes nas quais a maioria das viagens leva significativamente mais tempo do que o intervalo de escolha de rota para alcançar seus destinos, e nas quais o congestionamento muda significativamente ao longo do tempo. Modelos de grande escala que cobrem períodos de pico tendem a atender a essas condições.
Nesses casos, TDSP calcula caminhos melhores do que os custos Instantaneous e Experienced. No entanto, se você tiver modelos que já usam a opção Experienced, talvez prefira continuar usando esse custo inicialmente. Entretanto, consideramos que ela é uma opção legada e ela será eventualmente descontinuada.
Nota: Nosso algoritmo fornece uma solução exata somente quando o único componente de custo dependente do tempo é o tempo de viagem. Se a função de custo contiver outros componentes dependentes do tempo, como atratividade ou tarifas de pedágio que mudam ao longo do tempo, não podemos garantir caminhos de menor custo. Na maioria dos casos, esse problema não surge, mas vale a pena tê-lo em mente em caso de problemas de convergência no DUE.
Em um experimento SRC, há uma opção para obter os custos de uma replicação anterior, possivelmente de um experimento diferente. -Esta linha está no lugar certo aqui ou deveria estar antes?
Agrupar Intervalos de Escolha de Rota¶
O tempo de intervalo para os intervalos de escolha de rota fornece uma divisão básica do tempo simulado em um conjunto de intervalos regulares, e os custos dos caminhos são recalculados ao final de cada intervalo. A necessidade desse recálculo, no entanto, pode variar ao longo do período modelado. As mudanças nos custos dos caminhos e, portanto, na escolha de caminhos, serão maiores em períodos de congestionamento de pico, enquanto, no mesmo modelo, as mudanças no custo dos caminhos em períodos fora de pico serão menores, com correspondentemente poucas mudanças na escolha de caminhos.
O Agrupar Intervalos de Escolha de Rota opção permite que intervalos de escolha de rota sejam agrupados e que os custos dos caminhos sejam avaliados em intervalos menos frequentes quando há menor variação no congestionamento e, portanto, menor necessidade de recalcular custos de caminhos e variar a escolha de caminho.
No exemplo abaixo, o intervalo de tempo está definido como 6 minutos. Os 3 primeiros intervalos foram unidos, assim como os 3 últimos; portanto, os caminhos são avaliados às 08:00, quando o período simulado começa, às 8:18 e depois a cada 6 minutos até 08:42, quando os 3 últimos intervalos são mesclados.
Rotas Fixas¶
Para cada tipo de veículo definido na demanda de tráfego, pode ser definida a porcentagem de uso de Rotas OD predefinidas (definidas pelo usuário). Se essa porcentagem for definida como 0, serão usados apenas os caminhos calculados pelo processo SRC ou DUE; caso contrário, a porcentagem de veículos de todos os pares OD com rotas OD definidas usará as rotas OD fixas definidas anteriormente.
Além disso, para experimentos SRC (consulte a Escolha Estocástica de Rotas: seção de atribuição inicial), se um Plano de Atribuição de Rotas tiver sido selecionado nas entradas do Cenário, a porcentagem ‘Seguindo Resultados de Atribuição de Rotas’ determina a probabilidade de um veículo seguir os arquivos APA (após subtrair da demanda os veículos que seguem Rotas OD).
A porcentagem de OD Route é o primeiro valor considerado quando um veículo entra na rede. Se a probabilidade determinar que o veículo é atribuído a uma OD Route, então o Aimsun Next procurará um caminho de acordo com as porcentagens e rotas definidas no Matriz OD: Atribuição de Caminhos pasta. Se o veículo não for atribuído a nenhuma OD Route, então, em experimentos SRC, aplica-se a probabilidade de ser atribuído de acordo com um Path Assignment Plan (assumindo que um plano de atribuição de caminhos tenha sido especificado nas entradas do cenário). Por fim, se o veículo não for atribuído a uma OD Route nem a um Path Assignment Plan, aplica-se o Shortest Path calculado pelo Aimsun Next (modelos SRC ou DUE).
Por exemplo, em um experimento SRC, se 60% forem alocados para ‘Following OD Routes’ e 70% para ‘Following Path Assignment Results’, 60% dos veículos gerados seguirão uma rota OD, 28% (70% * (100%–60%)) seguirão um caminho lido de um plano de alocação de caminhos, e os 12% restantes (100%–60%–28%) seguirão um caminho construído pelo modelo de escolha de rotas. Isso se baseia na premissa de que, para cada par OD, há pelo menos uma rota definida na pasta da aba OD Matrix Path Assignment, e pelo menos uma rota no plano de alocação de caminhos.
Atribuição Dinâmica de Tráfego: Subaba DUE¶
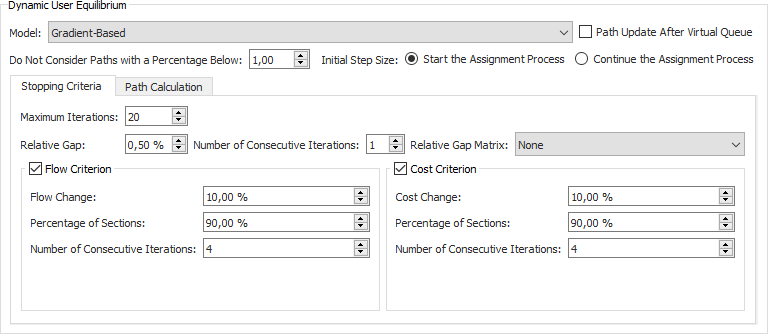
Os parâmetros usados em DUE são:
Modelo de Atribuição: Este parâmetro define o tipo de algoritmo usado: MSA, MSA ponderado ou o Baseado em gradiente método. Eles estão documentados no seção de Equilíbrio Dinâmico do Usuário da seção de teoria deste manual.
Atualização de Caminho Após Fila Virtual: Este parâmetro define se veículos em uma fila virtual atualizam sua escolha de caminho quando um novo intervalo de escolha de rota começa, devido a custos atualizados de atribuição de caminhos. É usado apenas em simulações estocásticas one shot.
Não Considerar Caminhos Com uma Porcentagem Abaixo de: Este parâmetro define o percentual mínimo de uso que um caminho requer para ser considerado na atribuição. Por exemplo, um percentual de 1% significa que caminhos com um percentual de atribuição calculado usando um dos métodos definidos no modelo de Atribuição inferior a 1% serão eliminados do conjunto de caminhos possíveis considerados para o par O-D correspondente.
Tamanho Inicial do Passo: Se um Path Assignment Plan estiver definido no cenário, então o processo DUE poderá ser iniciado usando os caminhos iniciais e as taxas de fluxo por caminho definidos por esse plano, ou poderá ser continuado a partir da última iteração armazenada no arquivo de Path Assignment. Esta opção só é exibida se um Path Assignment Plan tiver sido definido. Selecionar a opção para continuar o processo de alocação significa que o DUE lerá o arquivo de resultados de Path Assignment e continuará o processo DUE que estava armazenado no arquivo. Para continuar o DUE, o Aimsun Next primeiro simulará uma iteração usando a alocação de caminhos nos resultados de Path Assignment para obter os custos de caminho e de link e, em seguida, definirá a iteração a partir do arquivo. Consulte Iniciar e Continuar um Equilíbrio Dinâmico do Usuário para mais detalhes.
Os diferentes Critérios de Parada (Iterações Máximas e Gap Relativo, Fluxo e Custo critérios e Matriz de gap relativo) parâmetros são descritos na seção sobre Equilíbrio Dinâmico do Usuário. O Matriz de gap relativo pode ser definido para substituir o global Gap Relativo e interromper o processo de alocação de caminhos quando ele atingir o gap relativo definido para cada par OD. O Conteúdo da matriz deve ser definido como Gap Relativo e os valores nas células da matriz são interpretados da seguinte forma:
- Quando o valor para um determinado par OD é 0, então o valor global Gap Relativo é usado como critério de parada para este par OD.
- Quando o valor de um determinado par OD é maior que 0, esse valor é usado como critério de parada para o par OD.
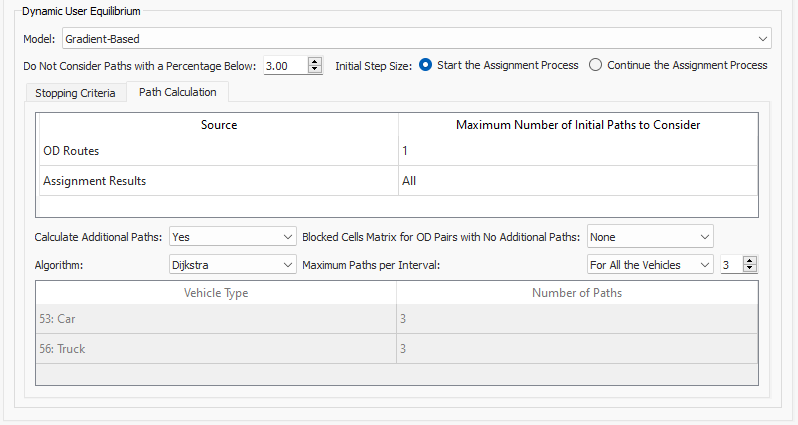
O Cálculo de caminho é usado para especificar quantos caminhos de diferentes fontes serão considerados:
-
Número Máximo de Caminhos a Considerar a partir de Rotas OD: Este parâmetro define o número de rotas OD que podem ser adicionadas ao conjunto de rotas possíveis para o par OD correspondente. Estas rotas e as rotas calculadas usando os custos dos links serão usadas nos algoritmos MSA ou baseados em Gradiente para calcular as vazões de fluxo por caminho.
-
Algoritmo: Há dois algoritmos para calcular os caminhos em experimentos Meso DUE: o primeiro Dijkstra algoritmo (usado em todos os outros tipos de experimentos) e o novo A-Star modelo. A diferença entre Dijkstra e A-Star algoritmos é que Dijkstra calcula uma árvore de caminhos mínimos de um centroide de destino para todas as seções e centroides da rede, enquanto o A-Star algoritmo calcula um caminho ponto a ponto de uma origem para um destino. Recomenda-se continuar usando Dijkstra em experimentos Meso DUE quando a demanda não é esparsa. Quando a demanda é esparsa, a A-Star o algoritmo consumirá menos memória do que o cálculo das árvores de caminho mínimo, melhorando o desempenho ao executar simulações DUE em modelos grandes.
-
Máximo de Caminhos por Intervalo: Este parâmetro define o número máximo de caminhos diferentes usados no processo de seleção de caminhos aplicado em algoritmo MSA. Ele pode ser definido globalmente para todos os veículos ou definido para cada tipo de veículo.
Além disso, se um plano de alocação de caminhos estiver definido no cenário, as seguintes opções aparecerão/serão desbloqueadas:
-
Número Máximo de Caminhos a Considerar a partir dos Resultados de Alocação: Este parâmetro define o número máximo de caminhos mais curtos considerados a partir dos arquivos Path Assignment Plan.
-
O Calcular Caminhos Adicionais é usado para permitir ou impedir o cálculo de novos caminhos no processo de atribuição e pode restringir os caminhos atribuídos para que sejam os mesmos da entrada Plano de Alocação de Caminhos. Neste caso, o processo de atribuição altera apenas as porcentagens dos caminhos e não inclui novos caminhos, a menos que não houvesse nenhum caminho na entrada Plano de Alocação de Caminhos para um determinado par OD.
- Matriz de Células Bloqueadas para Pares OD sem Caminhos Adicionais: Se definida, esta opção define um Tipo de Matriz OD com Conteúdo: células bloqueadas. Esta opção impedirá o cálculo de novos caminhos no processo de atribuição, mas apenas para os pares OD bloqueados definidos na matriz OD. Para usar esta opção, pelo menos uma matriz contendo Células bloqueadas deve ser criado.
Alocação Dinâmica de Tráfego: Aba SRC¶
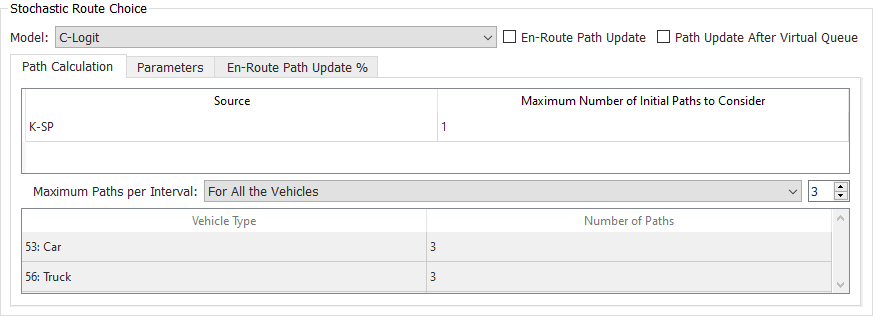
Os parâmetros gerais usados em Stochastic Route Choice são:
-
Modelo Estocástico de Escolha de Rotas: Este parâmetro determina o modelo de escolha discreta usado durante a simulação. As opções são:
- Fixo usando tempos de viagem em condições de fluxo livre,
- Fixo usando tempos de viagem após o período de aquecimento,
- binomial,
- proporcional,
- logit,
- C-logit
- ou definido pelo usuário
e são descritos na Escolha Estocástica de Rotas: seção do modelo de escolha de rotas. Os Parameters então conterão parâmetros relevantes para cada uma das opções.
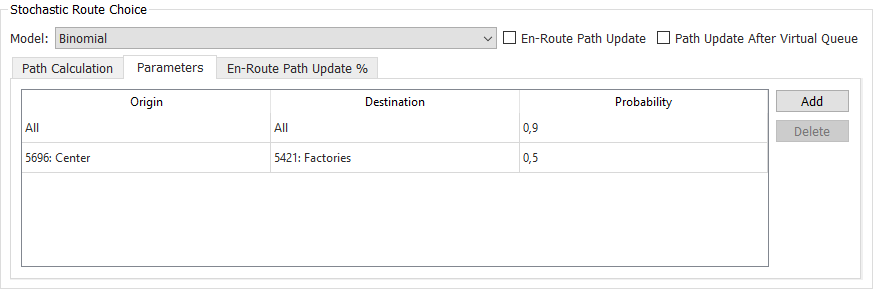
Binomial¶
O parâmetro p que controla a probabilidade de selecionar uma rota quando o modelo Binomial é escolhido. Ele é definido para todos os pares OD, mas também pode ser especificado para pares OD específicos. No exemplo abaixo, o probabilidade p atribuído a todos os pares OD é 0,9, exceto para um, onde o probabilidade p atribuído é 0,5.
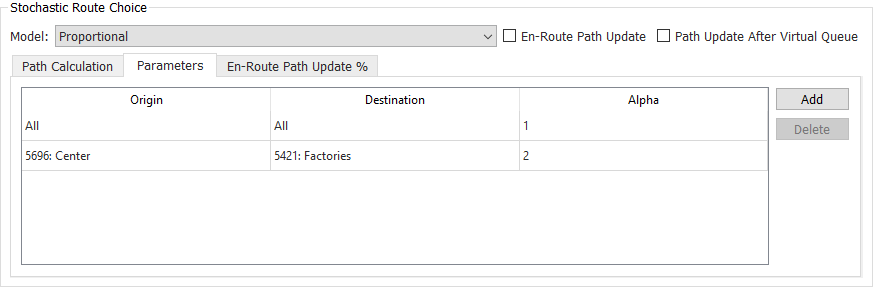
Proporcional¶
O parâmetro fator alfa, valor alpha, pode ser definido pela janela de parâmetros de Escolha de Rotas quando o modelo Proportional está selecionado (veja a próxima figura). Neste exemplo, o valor alpha atribuído a todos os pares OD é 1, exceto o par OD da origem 284 para 286, cujo valor atribuído é 2.
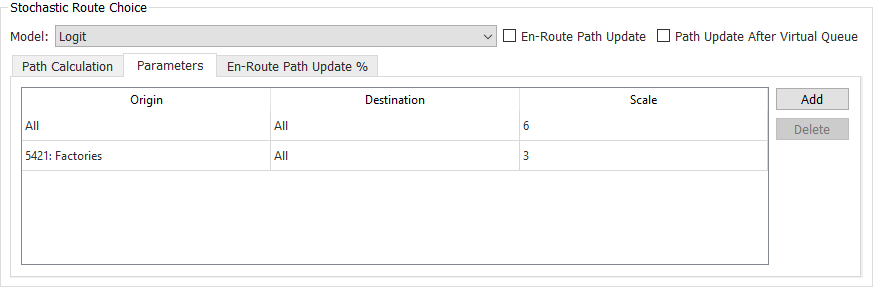
Logit Multinomial¶
O parâmetro, ou fator de escala, θ, é um parâmetro definido pelo usuário que, consequentemente, pode ser usado para ajustar o efeito que pequenas mudanças nos tempos de viagem podem ter nas decisões dos motoristas. O parâmetro de fator de escala pode ser definido por meio da janela de parâmetros de Escolha de Rota quando o modelo Logit está selecionado. No exemplo aqui, o valor atribuído a todos os pares OD é 10, exceto o par OD com origem 288 e destino 288, em que o valor atribuído é 5.
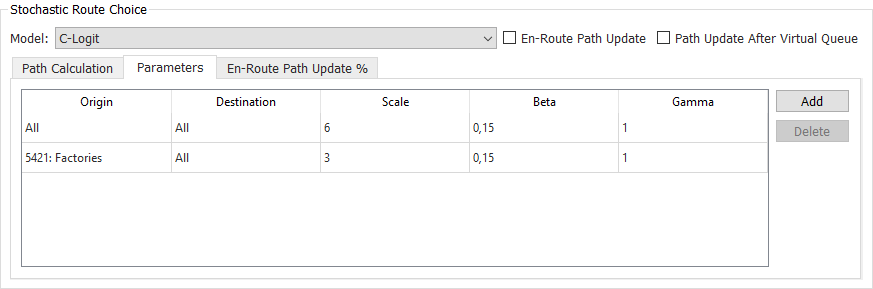
C-Logit¶
O parâmetro de fator de escala, θ, e os parâmetros de fator de comunalidade, β e γ, podem ser definidos pela janela de parâmetros Route Choice quando o modelo C-Logit é selecionado (veja a próxima figura).
Modelo de Escolha de Rota Definido pelo Usuário¶
Como alternativa aos Route Choice Models padrão, podem ser usados User-defined Route Choice Models. Selecionar a opção "User-Defined" Route Choice na aba Parameters exibe uma lista de modelos definidos pelo usuário Funções de Escolha de Rota disponível.
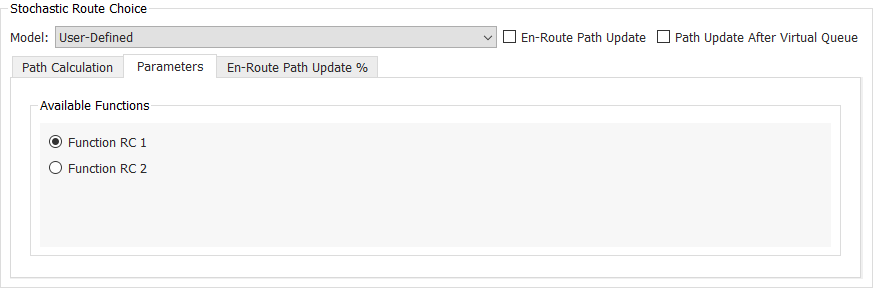
-
Atualização de Caminho em Rota: Quando marcada, esta opção permite que um en-route alocação de caminhos atualização. Quando esta opção está ativada, a subaba da pasta "En-Route Path Update %" é ativada, definindo, para cada tipo de veículo, a porcentagem de veículos que seguem um tipo de caminho específico (rotas OD, Path Assignment Plan ou caminho mais curto calculado) e podem aplicar atualizações de caminho em rota. Esses veículos serão considerados veículos guiados.
-
Atualização de Caminho Após Fila Virtual: Quando marcada, esta opção permite que uma atualização da atribuição de caminhos para todos os veículos aguardando em uma fila virtual. Esta ação será realizada para todos os veículos na fila virtual, independentemente do Atualização de Caminho Em Rota %.
-
Usar Custos de Links da Replicação: Os custos dos links para a Escolha Estocástica de Rotas podem ser obtidos de outro experimento ou de uma replicação no mesmo cenário.
Os parâmetros no Básico são:
- K-SP: Este parâmetro define o número de caminhos mais curtos calculados no início da simulação. Se este parâmetro for igual a 1, apenas uma árvore de caminho mais curto será calculada por centroide de destino no início da simulação, levando em conta o função de custo dinâmica. Caso contrário, calcula o k árvores de caminhos mais curtos.
- Máximo de Caminhos a Usar dos Resultados de Atribuição de Caminhos de Entrada: Este parâmetro define o número máximo de caminhos mais curtos considerados a partir do Path Assignment Plan. Os caminhos usados serão aqueles com a maior porcentagem de fluxo atribuída.
- Máximo de Caminhos por Intervalo: Este parâmetro define o número máximo de caminhos diferentes usados no processo de seleção de caminhos. Ele pode ser definido com o mesmo valor para todos os tipos de veículo ou diferentes tipos de veículo podem ter diferentes números de caminhos.
Aba Variáveis¶
O Variáveis aba no Editor de Experimento é idêntica à aba Variáveis no editor de cenário.
Se o valor de uma variável for definido para o experimento, o valor definido aqui será usado. Se ele não for definido para o experimento, será usado o valor definido pelo Editor de Cenário na aba Variáveis do Cenário.

Aba Políticas ¶
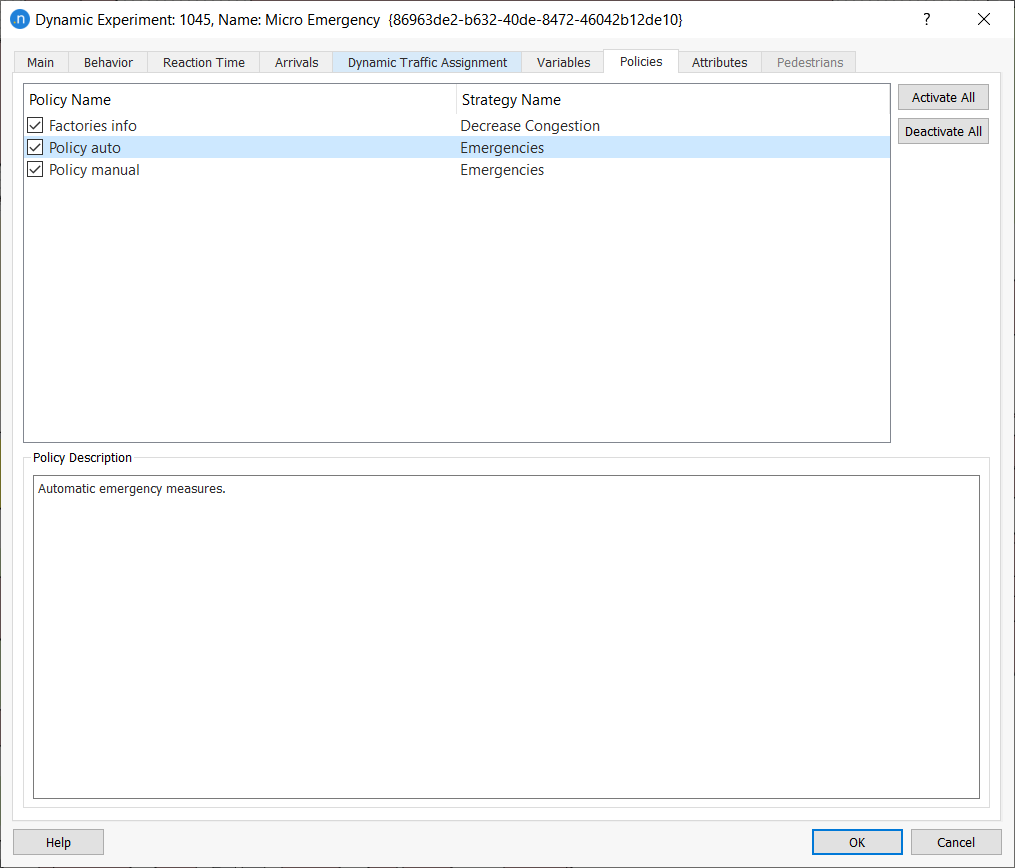
Nesta aba, uma lista de todas as políticas pertencentes a todas as Strategies e Conditions que foram selecionadas no Scenario (na aba Strategies & Conditions no Scenario Editor) pode ser ativada. Use o Ativar Todos botão para ativar todas as políticas e o Desativar Tudo botão para desativar todas as políticas. Clique em uma política para selecioná-la e clique em uma política ativa para desmarcá-la. As políticas selecionadas serão aplicadas durante a execução da simulação.
Políticas e Estratégias são descritas na Editor de Gerenciamento de Tráfego.
Aba Atributos ¶
A aba Attributes lista os atributos do experimento.
Replicações e médias para experimentos estocásticos de escolha de rota¶
Uma replicação é o objeto que executa uma vez um experimento de simulação dinâmica. Como os experimentos dinâmicos são uma simulação de Monte Carlo, isto é, em que cada replicação é executada com uma semente aleatória diferente para gerar resultados diferentes, cada experimento terá, portanto, um número de replicações, sendo o resultado do experimento uma média dessas replicações.
Uma replicação para um experimento microscópico é criada usando o menu de contexto do experimento.
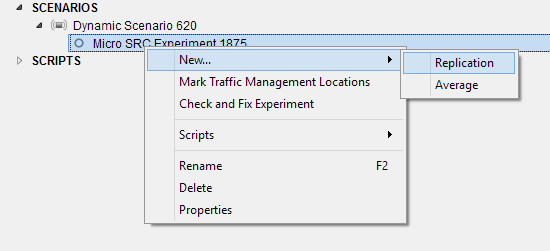
O editor de replicação especifica o número de replicações necessárias. O número de replicações é determinado pela variabilidade inerente nos resultados da simulação e pelo nível de confiança requerido na média das replicações. A recomendação a seguir foi extraída do US Federal Highways Authority Traffic Analysis Toolbox Vol 3: Guidelines for Applying Traffic Microsimulation Modeling Software.
O número necessário de repetições deve ser estimado por um processo iterativo. Geralmente é necessário um conjunto preliminar de repetições para fazer a primeira estimativa do desvio padrão dos resultados. A primeira estimativa do desvio padrão é então usada para estimar o número de repetições necessárias para tirar conclusões estatísticas sobre melhorias viárias alternativas.
O Criar média opção está disponível se ainda não existir uma média; caso contrário, o Adicionar à Média, a opção aparecerá e as novas replicações poderão ser adicionadas a uma média existente.
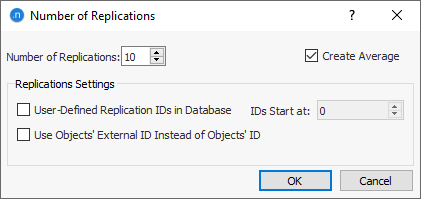
Os IDs de replicação podem ser definidos pelo usuário com um ID inicial especificado; alternativamente, o ID externo pode ser usado para identificar objetos ao recuperar dados.
As opções de recuperação de dados para uma replicação são:
- Recuperar dados: Carrega os resultados da simulação de uma replicação já simulada. Para carregar resultados de simulações anteriores, uma fonte de saída deve ser definida e a opção Store ativada (ver Pasta de Saídas a Gerar).
- Recuperar Dados usando um Intervalo de Agregação: Carrega os resultados médios do banco de dados, mas definindo o tempo de agregação do intervalo, que será múltiplo do intervalo estatístico atual. Os resultados podem ser recuperados filtrando a hora inicial e final (veja Recuperar resultados da simulação).
- Recuperar Resultados de Alocação de Caminhos: Carrega as atribuições de trajetos do banco de dados.
- Recuperar Custos de Links: Carrega os custos dos links a partir do banco de dados.
- Recuperar Matrizes de Skim: Carrega temporariamente as matrizes skim dos arquivos .bin para a pasta OD Matrices. As matrizes skim não serão salvas quando o documento for fechado.
Descarregamento de Dados e Resultados¶
Como complemento às opções de recuperação recém-descritas, para economizar memória, reduzir o esforço computacional e melhorar o desempenho, há duas opções que permitem descarregar do banco de dados os dados de replicação e os resultados de atribuição de caminhos:
- Descarregar Dados: Descarrega os dados da replicação que estavam armazenados no banco de dados, para economizar memória e melhorar o desempenho.
- Descarregar Resultados de Alocação de Caminhos: Descarrega as estatísticas de caminhos e as informações de atribuição de caminhos da replicação para economizar memória e melhorar o desempenho.
Pode ser útil selecionar uma ou ambas estas opções antes de recuperar dados e resultados de outra replicação.
O menu de contexto de Experimento tem, entre outras, opções para Ativar, Excluir, Renomear, Duplicar ou abra o Cenário Propriedades editor.
Ao selecionar Ativar a partir de um experimento, ele é ativado na área da barra de ferramentas de tarefas.
Editor de replicação¶
Depois que uma replicação é criada, ela pode ser editada clicando duas vezes nela no Navegador do Projeto ou selecionando a ação Propriedades em seu menu de contexto.
Uma replicação que não foi executada tem três abas e aparece em cinza na pasta do projeto
- Aba principal: Informações da replicação.
- Saídas a Gerar: Para especificar quais saídas são geradas além daquelas definidas pelo cenário.
- Validação: Para comparar as saídas com dados observados.
Uma replicação que foi executada tem quatro abas adicionais e aparece em azul na pasta do projeto:
As abas adicionais são documentadas no Seção de Saídas.
Aba Principal da Replicação¶
A aba principal define o nome da replicação e se IDs externos devem ser usados em vez de IDs de objetos para identificar os objetos no banco de dados ao executar ações de recuperação de dados.
A Random Seed usada pelo simulador também é definida aqui. Cada replicação deve ter uma semente diferente. A semente padrão é 0, o que permite que o Aimsun Next gere uma semente única para essa replicação. Uma simulação mesoscópica pode usar até cinco sementes extras para controlar individualmente diferentes aspectos da simulação: comportamento dos veículos, transporte público, ações de tráfego, escolha de rotas e características dos veículos. Estas são descritas no Seção de Simulação Mesoscópica.
Informações sobre o estado da simulação, se ela foi simulada ou não, também são fornecidas na aba principal
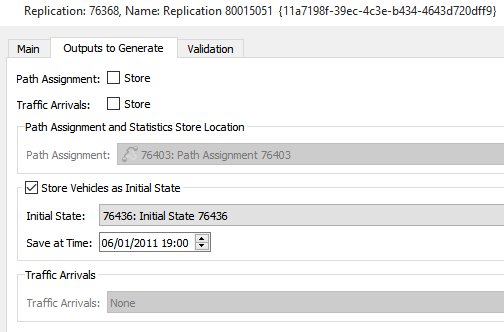
Aba Saídas a Gerar da Replicação¶
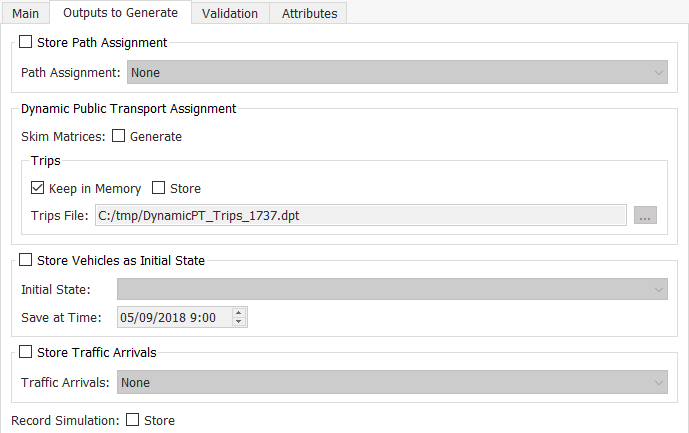
O Saídas a Gerar aba é usado para definir saídas adicionais àquelas especificadas no editor de Scenario, que serão criadas e preenchidas automaticamente quando a simulação terminar. Essas saídas são:
- Armazenar Atribuição de Caminhos.
- Armazenar Matrizes skim da Atribuição Dinâmica de Transporte Público.
- Armazenar viagens de Atribuição Dinâmica de Transporte Público.
- Armazenar veículos como Estado Inicial. Um estado inicial pode ser selecionado, o qual será usado para armazenar informações dos veículos em um determinado tempo de simulação. A lista de todos os Initial States disponíveis será exibida.
- Armazenar Chegadas de Tráfego.
- Armazenar Matrizes de Skim obtidas a partir do Resultados da Atribuição de Caminhos, da mesma forma que o Matrizes de Saída são calculados.
- Armazenar Matrizes Skim de Transporte Público.
- Gravar simulação.
As opções de geração e armazenamento da Dynamic Transit Assignment só aparecerão nesta caixa de diálogo desde que a simulação seja um experimento SRC, ela inclua pedestres e a Dynamic Transit Assignment é ativada no experimento.
Gravação e Reprodução de uma Simulação¶
A opção Record Simulation permite gravar uma simulação para reprodução e revisão posteriormente.
Para gravar a simulação, marque o Gravar simulação opção (veja Gravação e Reprodução de uma Simulação para mais informações). Isto copia todas as posições dos veículos em uma replicação para um arquivo (com extensão ARF) que é salvo no mesmo diretório do documento Aimsun.
Os seguintes dados são registrados:
- Se a replicação for uma microssimulação, as posições dos veículos serão armazenadas a cada passo de tempo e poderão ser reproduzidas para replicar a simulação. Não é possível fazer interpolação para suavizar a simulação.
- Se a replicação for uma simulação mesoscópica, as posições dos veículos são estimadas e armazenadas em um intervalo de tempo especificado no editor de replicação usando o parâmetro de taxa de atualização (um valor entre 1s e 60s). Isso pode então ser reproduzido, e os veículos serão exibidos como pontos. Nenhuma suavização é possível.
- Se a simulação gravada for da Resultado de um experimento DUE, então a última iteração é registrada para reprodução em forma mesoscópica ou de microssimulação, de acordo com o modo escolhido para o experimento DUE.
Para reproduzir a simulação gravada, na janela Project, clique com o botão direito na replicação e selecione Reproduzir Simulação Gravada. Talvez seja necessário interromper uma simulação anterior clicando no x controle na barra de tarefas.
Médias¶
Um Média é um objeto que contém os valores médios de um conjunto de replicações. As Médias são criadas usando o editor de Contexto do Experimento da mesma forma que as Replicações são criadas. Pode haver mais de uma Média para um experimento, e as replicações podem ser atribuídas a diferentes Médias à medida que são criadas ou selecionando-as na Aba Principal do editor de Média.
O menu de contexto para um Média tem as seguintes opções:
- Calcular: Obtém os resultados das replicações anexadas e calcula a média.
- Simular Replicações Pendentes: Execute aquelas replicações que ainda têm um Ainda Não Simulado status.
- Redefinir Replicações: Definir o status como Ainda Não Simulado para todas as replicações anexadas, na prática forçando que elas precisem ser executadas novamente.
As opções de recuperação de dados para uma Média são:
- Recuperar dados: Carrega os resultados Médios a partir de uma Média já calculada. Para carregar resultados Médios anteriores, uma fonte de saída deve ser definida e a opção Store ativada para todas as replicações incluídas na Média (veja Pasta de Saídas a Gerar).
- Recuperar Dados usando um Intervalo de Agregação: Carrega os resultados Médios do banco de dados, mas definindo o tempo de agregação do intervalo, que será múltiplo do intervalo estatístico atual.
- Recuperar Dados Médios e de Replicações: Carrega os resultados de Média e Replicações.
- Recuperar Custos de Links: Carrega os custos médios de links do banco de dados.
- Recuperar Matrizes de Skim: Carrega temporariamente as matrizes skim dos arquivos .bin para a pasta OD Matrices. As matrizes skim não serão salvas quando o documento for fechado.
Resultados e Resultados Incrementais para uma DUE¶
Um Experimento DUE contém uma ou mais Resultado ou Resultado Incremental que são os objetos usados para executar o experimento DUE. Como um DUE é um experimento dinâmico, o principal fator de diferenciação entre resultados é a semente aleatória (ou, no caso de um DUE, sementes aleatórias) usada para controlar a liberação dos veículos e seu comportamento. Outras alterações podem incluir os atributos definidos para cada resultado diferente.
Um DUE pode ser executado como um Resultado ou como um Resultado Incremental, a diferença está no número de iterações externas. Em um Resultado há apenas uma iteração externa usando a demanda definida no cenário. Em um Resultado Incremental pode haver várias iterações externas com percentuais crescentes de demanda. As primeiras iterações têm demanda menor, que é aumentada a cada iteração externa até 100% da demanda na última iteração. Isso tem o efeito de executar a rede em uma simulação sem congestionamento nas primeiras iterações para gerar caminhos de rota realistas, em vez de começar em uma situação congestionada na primeira iteração.
Resultado DUE¶
O DUE Result Editor é semelhante ao Editor de replicação SRC com um adicional Resumo DUE Tab que tem um número potencial de seis subabas para mostrar os resultados do DUE (as subabas dependem dos critérios selecionados no experimento).
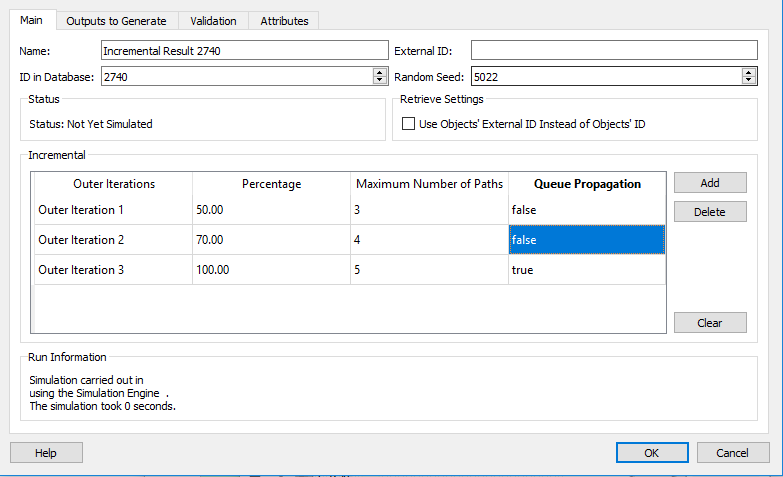
Resultados incrementais¶
Em um Resultado Incremental, há múltiplas iterações externas; estas são criadas na tabela Incremental, onde são especificadas a proporção da demanda e o número máximo de caminhos para cada viagem. Os critérios de convergência, o número de iterações e o RGAP são obtidos dos padrões do experimento. Se o número de caminhos não for especificado, o número padrão especificado no Aba DTA do editor de experimento é usado.
O Propagação de filas opção nos controles de DUE incremental controla como a rede é carregada na simulação mesoscópica. Definir isto como false dá o efeito de seções viárias com espaço de armazenamento infinito. Isso impede que filas se propaguem para o link precedente. Isso não é equivalente a definir Densidade de congestionamento para um número grande, esse valor ainda é usado na definição de velocidade e nos cálculos de mudança de faixa. Definir Propagação de filas para false gera uma simulação que representa gargalos devido ao congestionamento, pois as velocidades nas seções serão baixas quando o tráfego estiver denso, mas não simula gridlock, pois as filas não são propagadas de volta para as seções viárias a montante. Portanto, ela tem as características de uma simulação mesoscópica para determinar vazões de seções e como o congestionamento influencia a escolha de caminho, ao mesmo tempo em que também tem as características de uma alocação macro sem restrições de capacidade de vazão.
Esta opção é usada nas primeiras iterações do laço externo de um DUE Incremental sem caminhos iniciais, quando uma atribuição AoN precisa ser usada ou a demanda é simplesmente dividida entre todos os caminhos disponíveis. Isso frequentemente resulta em sobressaturação em seções críticas e, consequentemente, em gridlock causado por congestionamento devido à má escolha de caminhos. Usar esta opção evita o gridlock, permite que a atribuição seja concluída e, assim, encontre caminhos viáveis para a próxima iteração. Esta opção não deve ser usada na atribuição incremental final.
Usando o Propagação de filas opção com uma demanda reduzida também significa que o DUE pode ser iniciado com caminhos adequados para condições de fluxo livre, em vez de exigir que seja inicializado a quente com caminhos derivados de uma atribuição macro separada.
As abas restantes no editor Incremental Result são as mesmas que no Editor de Resultados e o Editor de replicação SRC.
Executando uma Simulação Dinâmica ¶
Uma replicação pode ser executada no modo Animated Simulation ou no modo Batch Simulation.
A simulação em lote não mostra a animação dos veículos e não pode ser pausada, apenas cancelada. Esta é a forma mais rápida de simular com o Aimsun Next, mas não oferece informações sobre o que está acontecendo durante a execução, além do número de veículos que estão sendo simulados no momento e do tempo restante para concluir a simulação. Isto é usado para simular experimentos já calibrados e validados.
A simulação animada mostra a animação dos veículos circulando pela rede. Ela é mais lenta, mas é necessária para observar e compreender uma rede conforme ela é modelada, e é muito útil para fins de demonstração. Está disponível apenas ao executar simulações microscópicas ou híbridas meso–micro. Esse tipo de simulação permite avançar rapidamente a simulação, removendo a animação dos veículos (semelhante ao modo batch), pausá-la a qualquer momento e inspecionar a situação atual. A simulação animada é controlada pela barra de tarefas, onde o controle da simulação aparecerá após o início de uma simulação.
Observe que, uma vez iniciada uma simulação animada, nenhuma alteração subsequente feita no modelo será considerada durante a simulação atual. Para incluir quaisquer alterações, cancele a simulação e reinicie-a.
Controle da Simulação¶
Quando uma simulação é iniciada, você pode monitorá-la e controlá-la usando recursos e ferramentas na barra de tarefas na parte superior da vista 2D.

Clique na i ícone à esquerda para ver informações sobre a replicação, ou clique duas vezes na replicação na janela Project. A aba Outputs Summary da caixa de diálogo Replication será exibida, com um relatório provisório sobre a simulação enquanto ela é executada. O Resumo das saídas fornece mais estatísticas após o término da simulação.
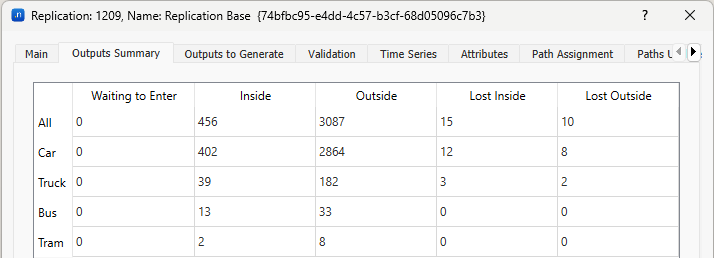
As informações fornecidas são as seguintes:
- Aguardando para entrar: Número de veículos que estão aguardando em uma fila virtual para entrar na rede.
- Dentro: Número de veículos que estão atualmente na rede.
- Externo: Número de veículos que saíram da rede.
- Perdidos internamente: Se o modo baseado em rotas estiver em uso, isto mostra o número de veículos perdidos que estão atualmente na rede. Estes são veículos que deixaram de realizar pelo menos um de seus movimentos de conversão pré-atribuídos e agora estão em um local a partir do qual seu destino original não pode mais ser alcançado.
- Perdido Fora: Se o modo baseado em rotas estiver em uso, isto mostra o número de veículos perdidos que deixaram a rede entre o horário atual e o início da simulação.
A parte de reprodução da barra de tarefas contém os seguintes controles:
- Controle deslizante de velocidade. Isso ajusta a velocidade da simulação, variando da velocidade real (x1), em que a velocidade da simulação imita o tempo real, até a maior velocidade na qual o computador consegue executar a simulação, designada pelo ícone de infinito ∞.
- Data da simulação. A data de hoje ou a data que foi definida no cenário atual da replicação.
- Botão Restart. Reinicia a simulação.
- Botão Play. Inicie a simulação.
- Botão avançar um passo. Simula um passo à frente.
- Botão de avanço rápido. Simula a simulação para frente o mais rápido possível. Durante o avanço rápido, você não poderá ver a animação.
- Botão Parar. Interromper a simulação.
- botão Record. Grave a simulação como um arquivo AVI (vídeo). Consulte Gravação de um Arquivo de Vídeo para mais informações sobre gravação.
- Botão Stop At. Clique para especificar um horário no qual deseja parar a simulação. Uma nova caixa de diálogo é exibida, na qual você pode especificar:
- Data de parada.
- Tempo de parada.
- Tempo de simulação atual.
- Controle deslizante de suavidade. Ajusta o quão suave a reprodução aparenta ser, de acordo com a frequência com que a animação é redesenhada/atualizada. Ele tem 5 posições:
- Desativado: O desenho é atualizado a cada passo de simulação.
- Fine: O desenho é atualizado aproximadamente 10 vezes por segundo. Se necessário, posições interpoladas são usadas para obter posicionamento mais refinado.
- Muito Fino: O desenho é atualizado aproximadamente 20 vezes por segundo. Se necessário, posições interpoladas são usadas para obter um posicionamento mais preciso.
- Grosseiro: O desenho é atualizado a cada 1 passos de simulação.
- Muito grosseiro: O desenho é atualizado a cada 2 passos de simulação
- Botão de cancelar tarefa. Clique X para cancelar a simulação.
Observe que a velocidade e a suavidade da simulação definidas na barra de controle não afetam o passo de simulação, que é definido no editor de experimento.
Gravação e Reprodução de uma Simulação¶
As opções de gravar e reproduzir permitem revisar e examinar o comportamento dos veículos em detalhes, ou revisitar uma parte da simulação a partir de um ângulo diferente, com mais interação visual do que com um arquivo de vídeo gravado (AVI).
Eles complementam, em vez de substituir, os arquivos de vídeo. Na verdade, você pode gravar um arquivo de vídeo enquanto reproduz a simulação. Funciona da mesma forma descrita em Gravação de um Arquivo de Vídeo.
Para gravar uma simulação:
- Na janela Projeto, selecione Replicação > Saídas a Gerar aba.
- Marque Gravar simulação e então OK.
- Iniciar a simulação.
A simulação será gravada como um rec_xxxx.arf arquivo, onde xxxx representa o ID da replicação (por exemplo, rec_3096). Este arquivo é salvo no mesmo diretório que o documento Aimsun (ANG).
Depois que a simulação for concluída e o arquivo ARF tiver sido salvo, você poderá reproduzir a simulação gravada.
Para reproduzir a simulação gravada:
- Interrompa qualquer simulação atual clicando no x controle na barra de tarefas.
- Na janela Project, clique com o botão direito Replicação > Reproduzir Simulação Gravada.
Enquanto a simulação gravada está sendo reproduzida, o i O ícone não aparece, mas as funções da barra de tarefas no modo de replay são idênticas às funções no modo de simulação, com exceção do botão Stop At, que não é necessário. Além disso, agora é possível retroceder um passo de tempo e avançar e retroceder um minuto.

Observação: As opções de suavização não são aplicáveis no modo de reprodução.
Se a gravação foi feita a partir de uma simulação mesoscópica em vez de uma microssimulação, as posições detalhadas dos veículos não estão disponíveis. As posições dos veículos são estimadas no intervalo de tempo especificado no editor de replicação e reproduzidas nesse intervalo de tempo, com os veículos representados como pontos.
Gravação de um Arquivo de Vídeo (AVI)¶
A gravação de vídeo para qualquer simulação está disponível tanto para visualizações 2D quanto 3D em uma microssimulação ou em uma simulação híbrida meso–micro.
Nota: Você também pode gravar um vídeo enquanto reproduz a simulação gravada descrita em Gravação e Reprodução de uma Simulação.
Para gravar um arquivo de vídeo:
- Defina suas preferências para o vídeo (consulte Preferências). As preferências incluem opções sobre onde salvar o arquivo e características como tamanho, velocidade, codec e compressão.
- Na visualização 2D ou 3D, organize a tela de modo que o vídeo grave o ponto de vista desejado. Talvez seja necessário selecionar uma câmera adequada, aplicar zoom e pan, ou alterar o ângulo para obter os resultados desejados.
- Clique no vermelho Registro botão na barra de tarefas de reprodução para iniciar o processo de gravação. Durante a gravação, você também pode alterar a visualização para gravar a partir de outras câmeras ou para combinar visualizações 2D e 3D.
- Clique Reproduzir para iniciar a simulação.
- (Opcional) Pressione o botão Record novamente para pausar a gravação. Pressione-o novamente para reiniciar a gravação. Repita esta etapa quantas vezes forem necessárias, para concentrar a gravação em determinadas partes da simulação.
A imagem na vista ativa é dimensionada para o tamanho de vídeo selecionado definido nas Preferences. Certifique-se de selecionar um tamanho grande o suficiente para o tamanho final do vídeo de que você precisa.
-Na primeira vez em que o botão de gravação for pressionado, será aberta uma caixa de diálogo em que poderá ser selecionado o método de compressão, se houver, a ser usado no vídeo.Quando a gravação termina ou é interrompida antes do fim, o arquivo de vídeo ficará disponível no local selecionado nas Preferências.
Estados Iniciais¶
A qualquer momento durante uma simulação dinâmica, ao selecionar a opção para Armazenar Veículos Como Estão como Estado Inicial cria um novo Estado Inicial.
Simulando uma Replicação em Lote¶
Ao simular em lote, as barras de tarefas mostram uma caixa de diálogo de informações (Clique no i ícone) para ver uma visão global da simulação enquanto ela está em execução. As informações são:
- Aguardando fora: Número de veículos que estão aguardando para entrar na rede.
- Dentro: Número de veículos que estão atualmente na rede.
- Saíram: Número de Veículos que deixaram a rede.
- Lost Inside: Se o modo baseado em rotas estiver sendo usado, o número de veículos perdidos que estão atualmente na rede.
- Lost Outside: Se estiver sendo usado um modo de simulação baseado em rotas, o número de veículos perdidos que saíram da rede desde o início da simulação.
A barra mostra:
- O tempo decorrido até agora para executar a simulação.
- Uma barra de progresso.
- Uma estimativa de quanto tempo é necessário para a simulação terminar.
- Um cancelamento (x) botão.

Simulando uma DUE¶
Um Dynamic User Equilibrium Experiment executa uma simulação várias vezes, ajustando as atribuições de caminhos a cada iteração. Cada experimento é executado com uma semente aleatória e a atribuição de caminhos de uma única replicação de simulação é usada para fornecer as entradas de custos para a próxima iteração. A natureza iterativa do experimento DUE reduz a dependência de resultados de uma única execução de simulação com uma única semente. Usuários preocupados com a possibilidade de que o processo DUE possa convergir para soluções significativamente diferentes devem executar vários experimentos e comparar os resultados.
Enquanto um experimento DUE está em execução, a barra de tarefas exibe:
Uma caixa de diálogo de informações (Clique no (i) ) para a visão global do experimento enquanto ele está em execução.
- O tempo decorrido até agora para executar o experimento.
- Qual iteração está sendo simulada atualmente.
- Uma estimativa de quanto tempo é necessário para o experimento terminar.
- Um cancelamento (x) botão.
Clicar no botão de informações abre o Editor de Resultados para exibir os resultados da simulação.
Saídas¶
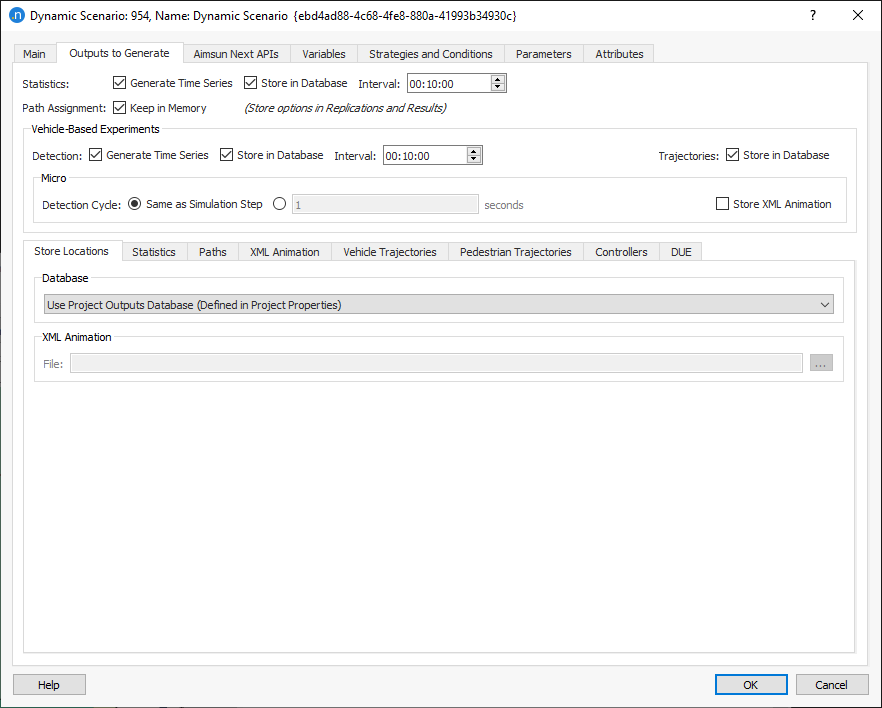
Opções de saída do cenário¶
O Saídas a Gerar Aba no editor de cenário detalha quais saídas são geradas pelos experimentos no cenário.
As estatísticas, caminhos e matrizes de relative gap podem ser ativados ou desativados, e pode ser selecionada a opção de armazenar os resultados na memória ou no banco de dados para que possam ser recuperados para uso posterior. Experimentos baseados em veículos também podem coletar dados de séries temporais de detectores, também em um intervalo especificado. Em ambos os casos, o intervalo deve ser maior que 00:00 e menor ou igual ao tempo total de simulação. Isso controlará com que frequência as estatísticas são geradas à medida que a simulação é executada e, portanto, o detalhe no visualizações de séries temporais e no Visualizações de mapa.
As Matrizes de Gap Relativo contêm o Gap Relativo por cada par OD.
O Ciclo de detecção é o passo de tempo no qual um detector coleta informações. Ele pode ser definido aqui para ser igual ao intervalo de tempo da simulação. Nesse caso, os dados do detector serão atualizados na mesma frequência da simulação.
Uma microssimulação também pode armazenar as posições dos veículos em um arquivo XML, ou no banco de dados de resultados do projeto.
Há várias subabas disponíveis na aba Outputs to Generate:
- Armazenar Localizações: Onde armazenar os dados de saída.
- Estatísticas: Quais dados coletar.
- Caminhos: As estatísticas de caminho a coletar.
- Animação XML: Armazenando posições de veículos em formato XML adequado para entrada no Legion.
- Trajetórias de Veículos: As trajetórias dos veículos são gravadas no banco de dados
- Trajetórias de Pedestres: As trajetórias dos pedestres são registradas no banco de dados.
- Controladores: Criando arquivos de log para controladores semafóricos.
- DUE: Opções para gerar e armazenar dados relacionados a experimentos DUE, incluindo gap relativo, estabilidade de fluxo e custo, e dados de iteração. Contagens de links e custos por iteração e intervalo também estão disponíveis.
Subaba de locais de armazenamento¶
Se Armazenar no Banco de Dados for selecionado para qualquer tipo de saída, eles serão armazenados de acordo com uma destas opções:
- Usar Banco de Dados de Saídas do Projeto
- Banco de dados automático
- Personalizado
O banco de dados para o cenário é especificado da mesma forma que para o projeto. Consulte o Editor de projeto para obter detalhes.
Os resultados de Atribuição de Caminhos são armazenados em um arquivo binário com um formato específico do Aimsun Next (.apa). Esses dados também podem ser mantidos em memória por eficiência. As opções de armazenamento de caminhos podem ser encontradas no Editor de Replicações.
Subaba Estatísticas¶
A subaba Statistics especifica quais saídas são necessárias. Elas são descritas em detalhes no Saídas da Simulação seção.
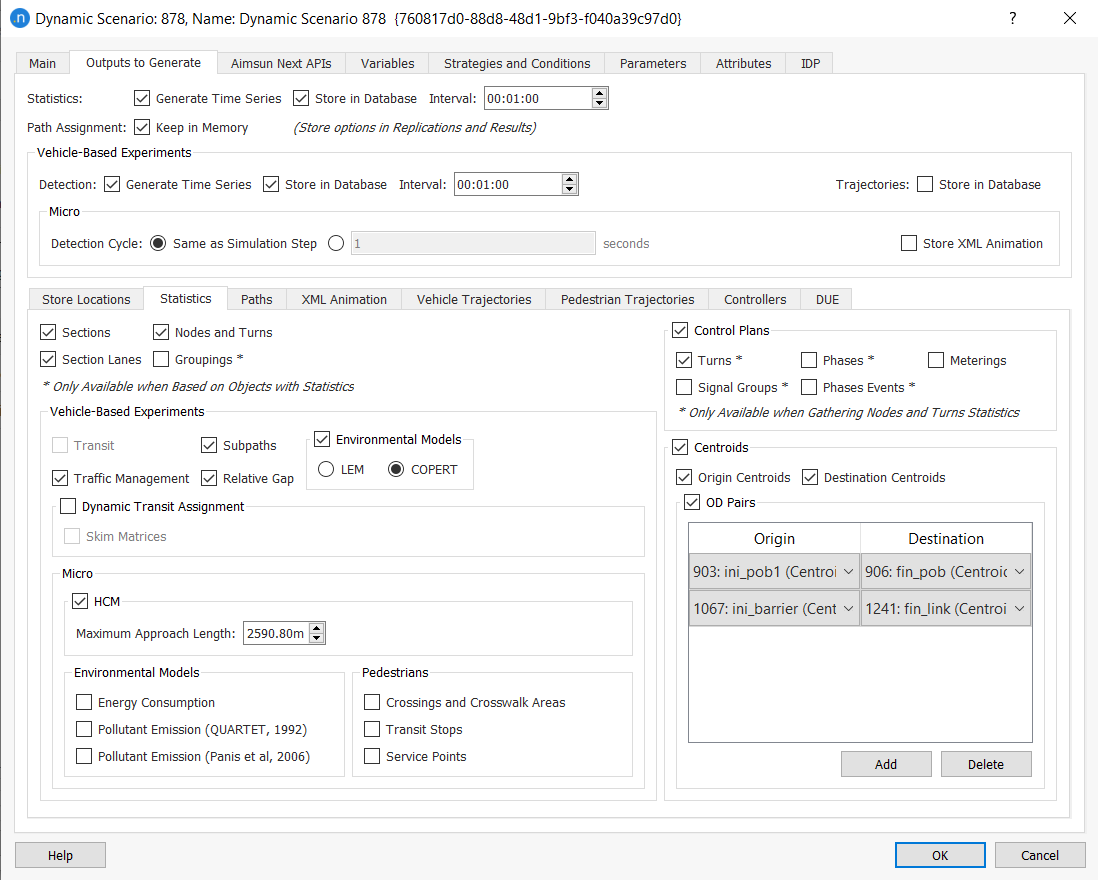
Os dados estão disponíveis para Seções, Seções por faixa, Nós e Movimentos de Conversão, e para Agrupamentos de objetos.
Os dados também estão disponíveis em microssimulação e em simulação mesoscópica para transporte público, subcaminhos e ações de gerenciamento de tráfego. O Módulo de Emissões de Londres (LEM) as saídas estão disponíveis tanto para simulações micro quanto meso, enquanto os outros modelos ambientais estão disponíveis apenas em microssimulação. As outras saídas que são apenas para microssimulação são as estatísticas HCM e saídas de pedestres. As estatísticas HCM para seções do tipo Urbano exigem a definição de um Comprimento Máximo da Aproximação.
A listagem de dados do plano de controle quando ocorreram eventos semafóricos pode ser coletada para movimentos de conversão e para fases e grupos semafóricos. A saída é armazenada no banco de dados de saídas do projeto.
Informações de viagem entre selecionados pares OD podem ser coletados especificando um conjunto de pares OD no Demanda de Tráfego caixa. Tantas viagens quantas forem necessárias podem ser especificadas clicando no Adicionar botão, ou o Todos a opção pode ser clicada para o centroide de Origem, o centroide de Destino ou ambos. As caixas de seleção dos centroides de Origem e Demanda criam saídas de séries temporais por centroide de origem ou destino.
Subaba Caminhos¶
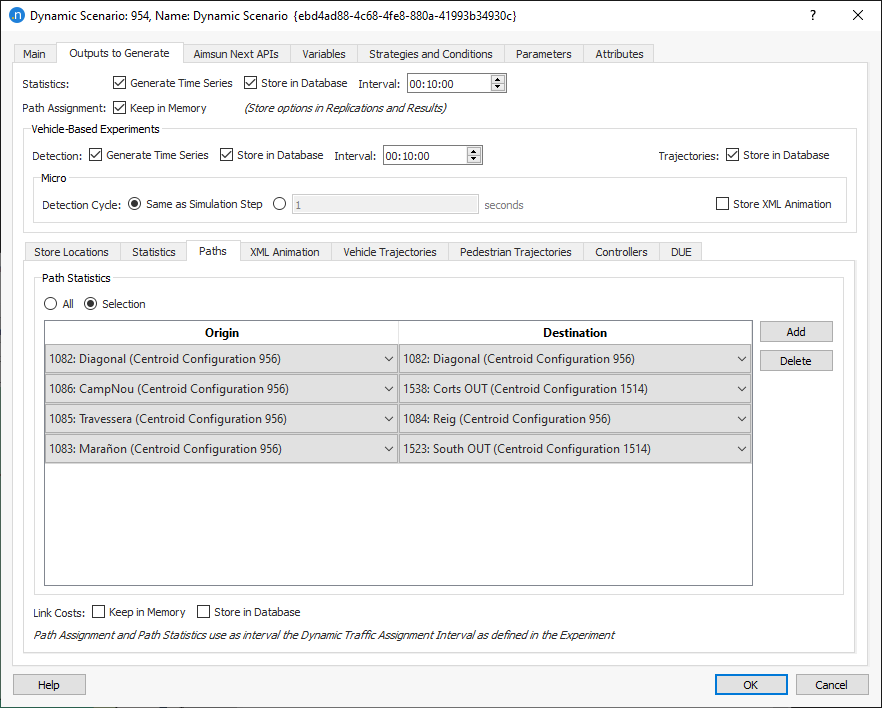
No Caminhos aba, podem ser coletadas estatísticas para os Caminhos calculados pelo algoritmo de Dynamic Traffic Assignment. Observe que essas informações estarão disponíveis somente ao simular usando Matrizes OD, pois as informações são derivadas do algoritmo de Dynamic Traffic Assignment, que só pode ser usado com Matrizes OD. O intervalo para coletar as estatísticas será o mesmo usado para recalcular os caminhos. As estatísticas podem ser coletadas para todos os Pares OD ou apenas para uma seleção; clicando no botão Add, um novo Par OD pode ser adicionado e, clicando no botão Remove, o Par OD selecionado será removido da lista.
Os custos de link também podem ser coletados e visualizados nas estatísticas de movimentos de conversão. Os custos de link são aqueles custos usados para calcular as árvores de caminhos mínimos. Ao usar Matrizes OD, os custos de link também serão exibidos pelo Ferramenta de análise de trajetórias para mostrar o custos incrementais em um caminho.
Subaba de Animação XML¶
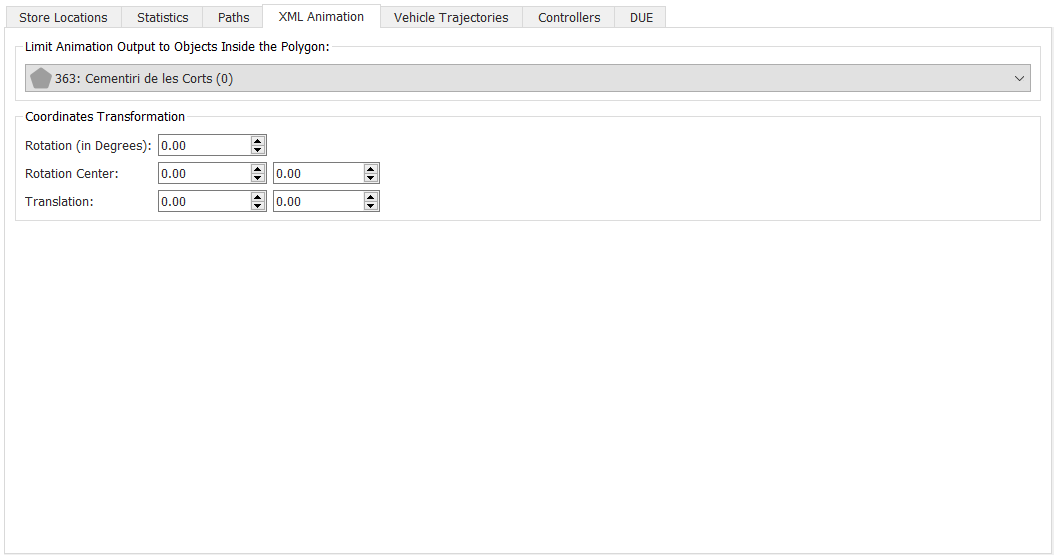
O Legion Studio usa a saída de uma simulação animada do Aimsun Next para permitir que planejadores e engenheiros de pedestres incluam simulações precisas de vias e tráfego (privado e de transporte público) em seus modelos. Ao importar o arquivo XML produzido pelo Aimsun Next, os usuários do Legion Studio podem automatizar a modelagem de travessias de pedestres sincronizadas com a simulação. O Simulator e o Analyzer da Legion usam o arquivo de saída do Aimsun Next para visualizar o movimento do tráfego durante uma simulação de pedestres. O Legion 3D lê os arquivos XML juntamente com os arquivos de resultados do Legion para produzir animações tridimensionais de alta qualidade de um ambiente com movimento preciso de veículos e pedestres.
Se o Armazenar animação XML opção estiver selecionada, esta aba oferece a capacidade de limitar a saída aos veículos dentro de um polígono selecionado e corrigir as coordenadas da saída por rotação e translação.
A fazer - Rotação ou translação primeiroSubaba de Trajetórias de Veículos¶
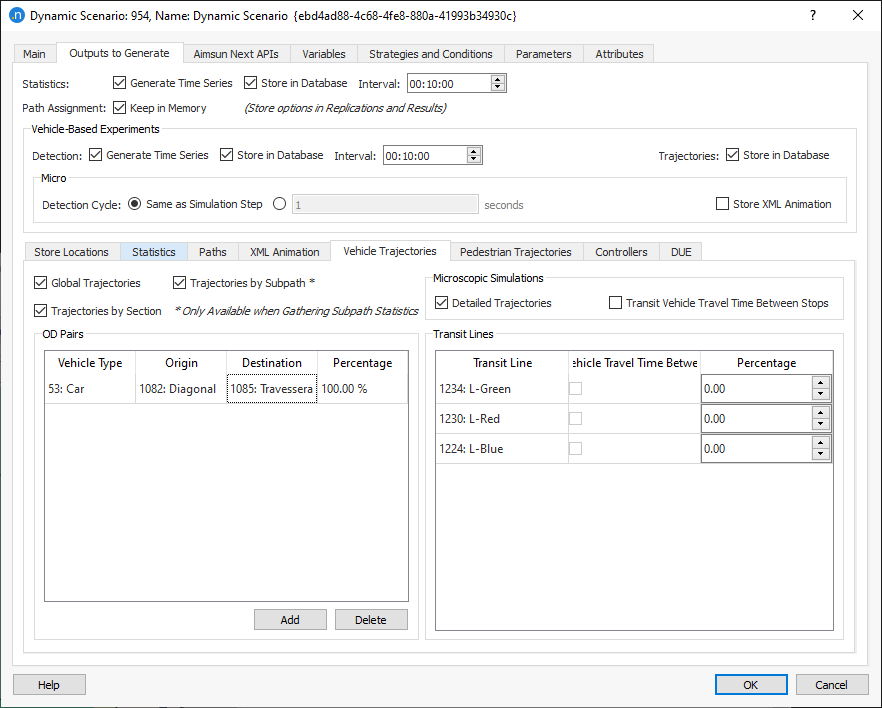
O Trajetórias de Veículos a aba é usada para determinar quais dos veículos na simulação são selecionados para ter suas trajetórias exportadas e qual nível de detalhe é exportado. A opção para armazenar trajetórias de veículos no banco de dados de saídas deve estar selecionada para habilitar as opções nesta aba.
Há três tipos de trajetórias:
- Trajetórias globais: Para cada veículo, a trajetória armazenará seus centroides de origem e destino. Para cada veículo de transporte público, ela armazenará as seções em que o veículo entrou e saiu da rede. Para todos os veículos, também armazenará seus horários de entrada e saída na rede, o tempo de viagem e o tempo de atraso para toda a viagem.
- Trajetórias por seção: Para cada veículo, serão armazenados o ID de cada seção pela qual ele passou, o horário de saída do veículo de cada seção e o tempo de viagem e o tempo de atraso do veículo em cada seção.
- Trajetórias por Subcaminho: Para cada veículo que completa um subcaminho, as estatísticas desse caminho são coletadas e incluem o tempo de viagem, o número de paradas e a distância percorrida. Os dados são descritos no Seção de Estatísticas.
- Em Simulações Microscópicas:
- Trajetórias Detalhadas: Para cada veículo, para cada passo de simulação, serão armazenados o ID da seção ou nó atual do veículo, o índice da faixa, as coordenadas x e y do ponto médio dianteiro do veículo, a velocidade atual, a aceleração atual e a distância percorrida desde que o veículo entrou pela primeira vez na rede.
- Tempo de Viagem de Veículo de Transporte Público Entre Paradas: Informações para trajetórias de veículos de transporte público relativas a manobras em paradas de ônibus, isto é, horário de chegada e de partida do veículo nas paradas de transporte público.
Como a quantidade de dados de trajetória pode ser muito grande, filtros podem ser aplicados para limitar o número de trajetórias armazenadas.
Filtragem por Pares OD¶
Se a demanda de tráfego selecionada for uma coleção de Matrizes OD, as trajetórias podem ser filtradas selecionando um conjunto de Pares OD. Cada linha na tabela de Pares OD seleciona um conjunto de veículos. Apenas uma das regras/linhas precisa ser verdadeira para que o par OD seja selecionado.
Uma regra/linha tem os seguintes seletores:
- Tipo de Veículo: Um tipo de veículo específico ou "any".
- Origem: Um centroide de origem específico ou "any".
- Destino: Um centroide de destino específico ou "any".
- Porcentagem: Determina a porcentagem de veículos selecionados por esta regra.
Filtragem por Seções de Entrada¶
Se a demanda de tráfego selecionada for uma coleção de Traffic States, as trajetórias podem ser filtradas selecionando um conjunto de seções de entrada. Cada linha na tabela de Entrance Sections seleciona um conjunto de veículos. Apenas uma das regras/linha precisa ser verdadeira para que as trajetórias originadas nessa seção sejam selecionadas.
Uma regra/linha tem os seguintes seletores:
- Tipo de Veículo: Um tipo de veículo específico ou "any".
- Seção de Entrada: Uma seção de entrada específica ou "any".
- Porcentagem: Determina a porcentagem de veículos selecionados por esta regra.
Filtragem por linha de transporte público¶
A linha de cada Linha de Transporte Público no Plano de Transporte Público determina a porcentagem de veículos de uma Linha de Transporte Público que será armazenada no banco de dados de saída.
Subaba de Trajetórias de Pedestres¶
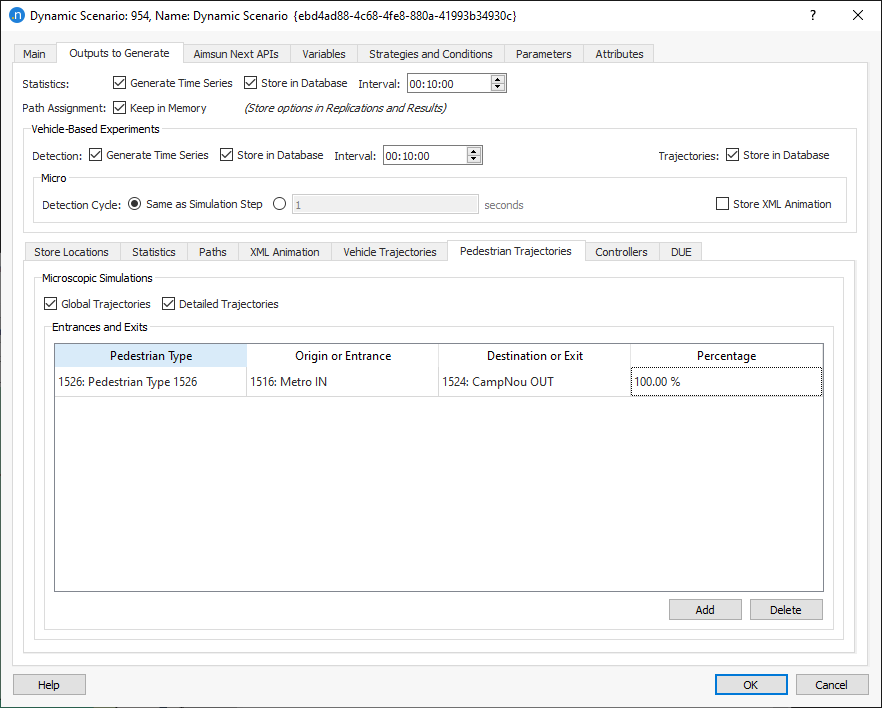
O Trajetórias de Pedestres A aba é usada para determinar quais pedestres na simulação são selecionados para terem suas trajetórias exportadas e qual nível de detalhe é exportado. A opção para armazenar Trajetórias no Banco de Dados deve ser selecionada acima para desbloquear as opções nesta aba.
Há dois tipos de trajetórias em Simulações Microscópicas:
- Trajetórias globais: Para cada pedestre, a trajetória armazenará seus centroides de origem e destino. Ela também armazenará seus tempos de entrada e saída na rede para a viagem completa.
- Trajetórias Detalhadas: Para cada pedestre, em cada passo de simulação, armazenará o ID das coordenadas globais x e y do pedestre, o tempo de simulação em segundos a partir da meia-noite, a velocidade do pedestre, a distância percorrida pelo pedestre em metros e o id da travessia do pedestre.
Como a quantidade de dados de trajetória pode ser muito grande, filtros podem ser aplicados para limitar o número de trajetórias armazenadas.
Filtragem¶
Se a demanda de pedestres selecionada for uma coleção de matrizes OD, as trajetórias podem ser filtradas selecionando um conjunto de pares OD. Cada linha na tabela de pares OD seleciona um conjunto de pedestres. Apenas uma das regras/linhas precisa ser verdadeira para que o par OD seja selecionado.
Uma regra/linha tem os seguintes seletores:
- Tipo de Pedestre: Um tipo específico de pedestre ou "any".
- Origem ou Entrada: um centroide de origem específico, entrada ou "any".
- Destino ou Saída: Um centroide de destino específico, saída ou "any".
- Porcentagem: determina a porcentagem das porcentagens selecionadas por esta regra.
Subaba Controladores¶
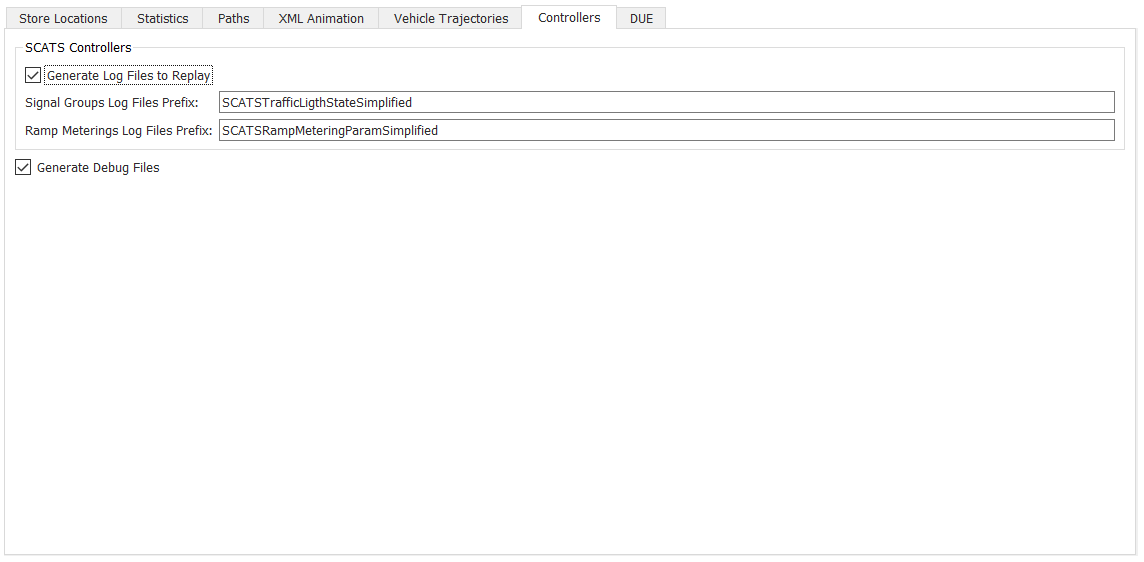
A saída de depuração de um controlador externo de plano semafórico é ativada ou desativada nesta guia. As saídas são armazenadas em arquivos de log no diretório (no Windows) "/Users/usuário/AppData/Roaming/Aimsun/Aimsun Next/Logs". O nome do arquivo é, para a maioria dos controladores, AimsunNextSignalState.log, o controlador SCATS RMS registra informações de depuração em AimsunNextRampMeteringStateX.log.
Saídas adicionais de depuração de um controlador SCATSim podem ser geradas e posteriormente usadas como entrada para um cruzamento controlado por SCATS para reproduzir o mesmo padrão de sinais, sem conexão ao SCATSim. Isso está documentado em Seção do controlador.
Subaba DUE¶
O DUE subaba permite gerar dados adicionais relacionados a DUE, que podem ser usados para monitorar o desempenho e melhorar os esforços de calibração. Essas saídas podem ser muito grandes e, portanto, deve-se fazer uma seleção cuidadosa dos dados. Isso pode melhorar o desempenho do Aimsun Next e o tamanho do banco de dados.
-
Marque Matrizes de Intervalo Relativo: Gerar para produzir as matrizes RGap para pares OD. Elas são geradas como matrizes internas e como um conjunto de .csvs na mesma pasta do modelo.
-
Marque Gap Relativo, Estabilidade de Fluxo e Custo e Dados de Iteração: Store in Database para gerar saída e armazenar informações sobre o rgap e os níveis de estabilidade de fluxo e custo alcançados nos links em relação aos critérios de parada da atribuição dinâmica de tráfego. Essas informações são salvas nas tabelas DUERGAP e DUEITERDATA
-
Marque Armazenar contagens e custos de links por iteração e intervalo para gerar como saída o custo e a contagem de cada link por tipo de veículo para cada link na rede. Essas informações são salvas na tabela DUELINKDATA. Os seguintes filtros estão disponíveis:
-
Todas as Iterações: armazenar contagens e custos de cada iteração
-
Últimas N Iterações: armazenar contagens e custos das últimas N iterações
-
Agrupamento: armazenar contagens e custos de um subconjunto de seções definido como um agrupamento
-
Resultados de Replicação e Média¶
O editor de propriedades de uma replicação de experimento dinâmico será estendido após a execução do experimento com uma aba Outputs Summary, uma aba Time Series, uma aba Validation e, se matrizes OD tiverem sido usadas na simulação, uma aba Path Assignment.
- O Resumo das saídas aba lista o valor global de todas as saídas.
- O Séries Temporais usa o visualizador padrão de séries temporais para objetos para exibir saídas. Seu uso está documentado no Seção de Séries Temporais.
- O Validação aba compara os dados observados do cenário com os dados simulados da replicação. Consulte a discussão sobre validação de modelos no Seção de Calibração e Validação.
- O Atribuição de Caminhos aba exibe os resultados relacionados ao caminho. Esta aba só está disponível quando o Demanda de Tráfego é baseado em OD.
Aba Resumo de saídas¶
A aba Outputs Summary lista o valor global de todas as saídas de simulação com o valor, desvio padrão e as unidades. A Copiar botão copia os valores selecionados na tabela para a área de transferência do sistema. Como esses valores são calculados está documentado na Seção de Cálculo das Saídas Estatísticas.
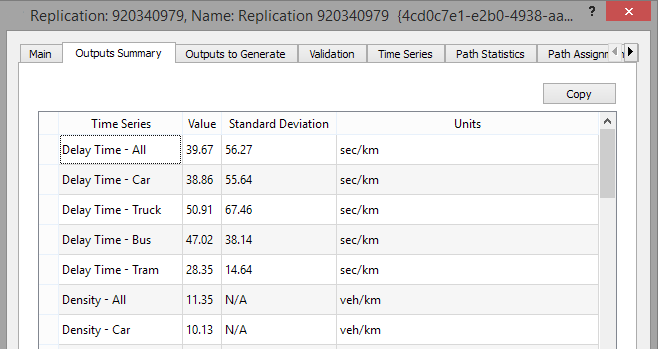
Durante a simulação, os dados que o aba Resumo de saídas fornece é um subconjunto.
Aba de séries temporais¶
A Aba de Séries Temporais usa o Visualizador de Séries Temporais para mostrar como as variáveis variam à medida que a simulação é executada e, se várias variáveis forem selecionadas, como elas se correlacionam durante a simulação. As variáveis listadas nas séries temporais são as medidas globais de simulação para a replicação, ou as séries temporais de um objeto selecionado podem ser exibidas. Assim como em todas as outras exibições de séries temporais; o desvio padrão e a média podem ser exibidos, ou os dados mostrados em forma tabular.
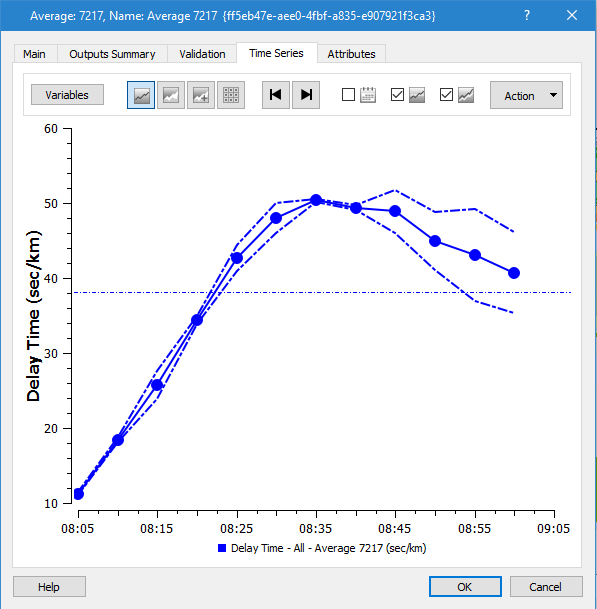
Aba Validação¶
A aba Validation compara o fluxo ou volume observado contado por um detector com o fluxo ou volume da seção calculado na replicação. Isso usa um Real Data Set conforme documentado no Conjunto de Dados Reais seção do manual. O Real Data Set usado na comparação deve ser carregado e definido no editor de Cenário:Main Tab como o Real Data Set para validação.
Depois que a Time Series correspondente a ser comparada com os volumes da Alocação é selecionada na pasta Validation, há três representações diferentes possíveis disponíveis: por meio de um Gráfico, um gráfico de Regressão ou uma Tabela. Elas são mostradas nas três figuras abaixo:
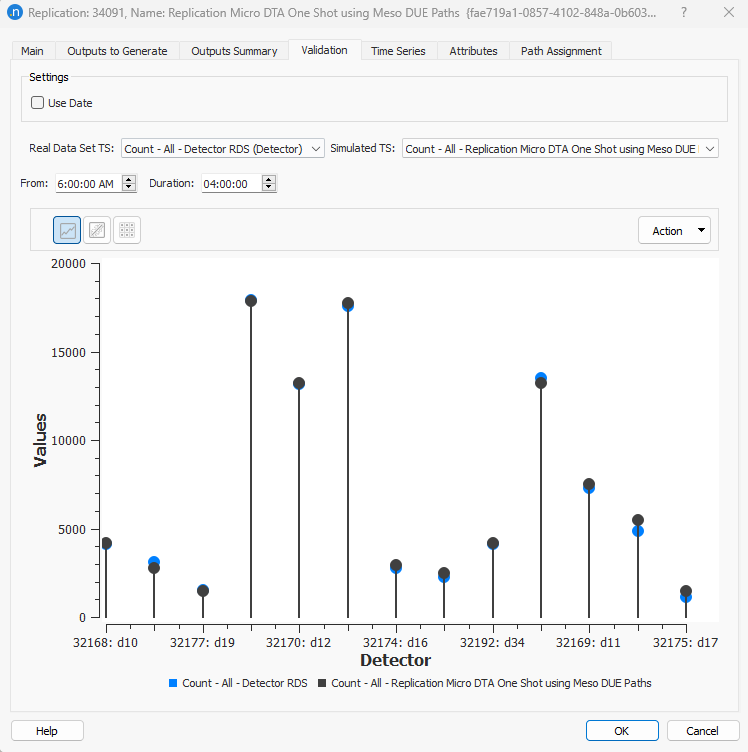
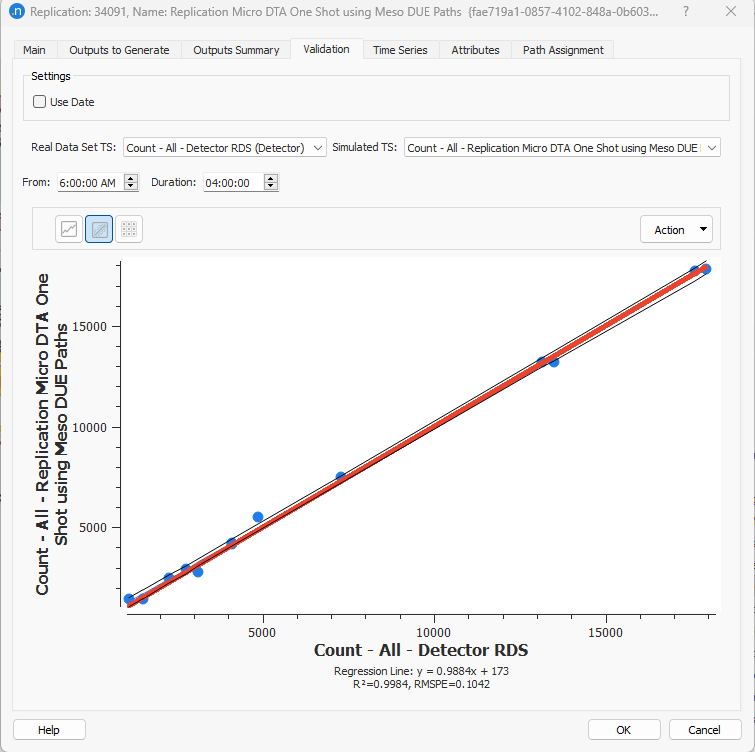
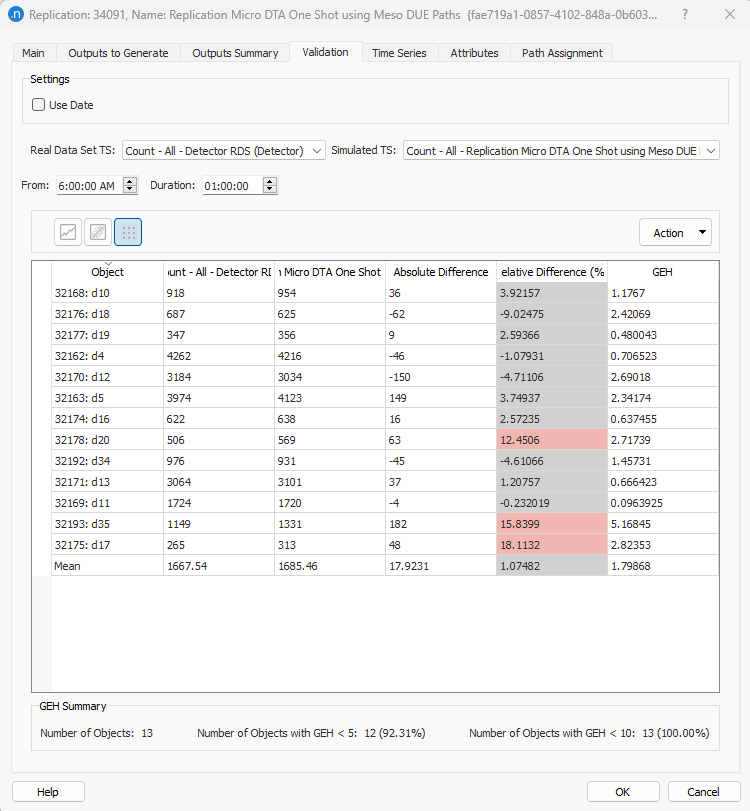
No gráfico de regressão, a linha azul é a linha de regressão, as linhas pretas são os intervalos de confiança de 95% em e a linha vermelha representa a linha fixa y = x.
Na representação em tabela, os volumes ou fluxos observados e atribuídos são listados, bem como sua diferença absoluta e sua diferença relativa calculada como:
100 * ( (Atribuído-Observado)/Max(Atribuído, Observado))
Também há opções para calcular Coeficiente de Theil e um GEH valor.
Ações¶
Os dados podem ser copiados como uma tabela ou como uma imagem do gráfico
Os limites do gráfico podem ser definidos no Ajustar limites opção.
Aba de Atribuição de Caminhos¶
A aba Path Assignment é descrita no Análise de Caminhos: Alocação seção.
Aba de Atualização de Caminho em Rota¶
A aba En-Route Path Update é descrita na Análise de caminhos: atualização de caminho em rota seção.
Saídas de resultados DUE¶
Os resultados de um DUE são semelhantes aos resultados de uma simulação dinâmica SRC com os mesmos caminhos, séries temporais e abas de validação. Eles estão documentados no Replicações e Médias seção. No entanto, um resultado DUE tem uma aba Summary extra detalhando a convergência DUE.
Aba de Resumo DUE¶
A aba de resumo DUE tem, potencialmente, seis subabas: Relative Gap, Flow Stability, Cost Stability, Stability, Vehicles per Iteration e Execution Times. As abas que aparecem dependem dos critérios que você seleciona no experimento. Por exemplo, se Flow Criterion ou Cost Criterion não estiverem marcados, as subabas Flow Stability e Cost Stability não serão exibidas.
Gap Relativo¶
O estatística de Gap Relativo representa a diferença entre os custos de caminho atuais e os custos mínimos atuais em cada intervalo DTA. O Gap Relativo a subaba mostra a evolução do alcançado Gap Relativo para cada tempo de intervalo DTA à medida que o processo itera. O tempo de intervalo é definido no Aba DTA do editor de experimento.

Em um Resultado Incremental, é mostrado o Relative Gap para a última iteração externa com 100% da demanda de tráfego.
Subabas de estabilidade¶
As subabas Flow Stability e Cost Stability mostram, para cada intervalo de cálculo de caminhos, o percentual de links cuja variação de fluxo/custo (em relação à iteração anterior e ao mesmo intervalo) está abaixo do valor exigido como critério de parada.


Para cada iteração, intervalo, tipo de veículo e link, a contagem e os custos, bem como a variação destes em comparação com a iteração anterior, podem ser vistos na subaba Stability.

Uma Nota sobre Fluxo e Estabilidade¶
Em gráficos de estabilidade de fluxo e estabilidade de custo, quando um intervalo atinge a convergência (quando os critérios de parada são atendidos), seu valor percentual é retido no gráfico para quaisquer iterações subsequentes. Por exemplo, a linha azul-escura do intervalo 08:00:00 no gráfico abaixo atinge a convergência na iteração 6 e seu valor permanece o mesmo nas iterações 7–13.

Na prática, uma vez que um intervalo tenha convergido, a distribuição dos veículos é interrompida, o que significa que o real a variação é zero a partir desse momento. No entanto, mantemos os valores no gráfico para que você possa ver as porcentagens de que cada intervalo precisou para alcançar a convergência.
No entanto, na subaba Stability, são reportados os dados reais de custo e contagem. Portanto, para todas as iterações de um intervalo posterior àquele em que a convergência foi alcançada, é registrada uma variação de 0%, como pode ser visto nas colunas Count Variation e Cost Variation mostradas abaixo.

Você pode encontrar mais informações sobre convergência no Seção de Critérios de Convergência da seção teórica deste manual. Observe que eles são armazenados no banco de dados como dados brutos: contagem e custo por seção, por iteração, por fatia e por tipo de veículo (veja também Tabelas de Convergência DUE).
Veículos por Iteração¶
A subguia Vehicles per Iteration mostra:
- Aguardando entrada: número de veículos que estão aguardando para entrar na rede.
- Dentro: Número de veículos que estão atualmente na rede.
- Fora: Número de Veículos que saíram da rede.
Tempos de execução¶
A subaba Execution Times mostra, para cada iteração, em segundos:
- DNL: Tempo para o Dynamic Network Loading. Este é o tempo da simulação.
- SP: Tempo para o cálculo do caminho mais curto.
- MSA: Tempo para o algoritmo Method of Successive Averages.
- RGap: Tempo para o cálculo do Gap Relativo.
Tempo de Execução Global (em segundos): A média dos tempos de cada iteração e um total acumulado do tempo de simulação.