Equilíbrio Dinâmico do Usuário (DUE)¶
Para que uma Dynamic Traffic Assignment se torne um DUE, as hipóteses comportamentais sobre como os viajantes escolhem as rotas precisam ser consistentes com o princípio de equilíbrio dinâmico do usuário. Ran e Boyce 1996, formulam a versão dinâmica do equilíbrio do usuário de Wardrop nos seguintes termos: Se, para cada par OD em cada instante de tempo, os tempos reais de viagem experimentados pelos viajantes que partem no mesmo horário forem iguais e mínimos, o fluxo dinâmico de tráfego na rede estará em um estado de equilíbrio dinâmico do usuário (DUE) baseado em tempo de viagem.
Abordagem heurística no Aimsun Next¶
Essa formulação poderia corresponder aos cenários hipotéticos nos quais aplicações ATMS e ATIS funcionarão e sistemas confiáveis de informação de tráfego/previsão de tráfego se tornarão disponíveis aos viajantes, permitindo que eles ajustem seus comportamentos de acordo. Alternativamente, ela pode ser considerada a realização de um processo no qual os viajantes ajustam suas informações atuais com conjecturas sobre as condições de tráfego esperadas à frente; isso poderia corresponder ao processo seguido por passageiros pendulares que adaptam seu comportamento de acordo com um processo de aprendizado dia a dia, dependendo das flutuações dos padrões de tráfego, até considerarem que nenhuma melhoria adicional é possível. Essa interpretação é implementada em uma abordagem de microssimulação por meio de um procedimento heurístico iterativo que mimetiza o processo de aprendizado dia a dia, levando a uma solução que pode ser interpretada como um DUE, Barcelo e Casas 2002, Liu et al. 2005.
A implementação no Aimsun Next replica a simulação \(N\) tempos e custos dos links para cada link \(j\), para cada intervalo de tempo \(t, t+1, ..., L\) (onde \(L = T/t\), \(T\) sendo o horizonte de simulação e \(t\) o intervalo de tempo definido pelo usuário no qual atualizar caminhos e fluxos de caminho) a cada iteração \(n\) são armazenados. Assim, na iteração \(n\) os custos dos links da iteração anterior \(n-1\) pode ser usado para estimar o custo esperado do link na iteração atual. Seja \(S_a^{jl}(v)\) seja o custo atual do link a com fluxo \(v\), na iteração \(l\) da replicação \(j\), então os custos médios dos links para o futuro \(L-l\) intervalos de tempo, com base nos custos de link experimentados para o anterior \(j-1\) replicações é dado por
O custo de link "previsto" pode então ser calculado como:

O custo resultante do caminho k para o i-ésimo par OD é dado por:
onde, como de costume, a matriz de incidência arco-caminho δ\(_{ak}\) é:1 se o link \(a\) pertence ao caminho \(k\) e 0 caso contrário.
Os custos dos caminhos  são os argumentos da função de escolha de rota (logit, C-logit, proporcional, definida pelo usuário, etc.) usada na iteração \(l+1\) para dividir a demanda \(g_i^{l+1}\) entre os caminhos disponíveis para o par OD \(i\).
são os argumentos da função de escolha de rota (logit, C-logit, proporcional, definida pelo usuário, etc.) usada na iteração \(l+1\) para dividir a demanda \(g_i^{l+1}\) entre os caminhos disponíveis para o par OD \(i\).
A implementação padrão na versão atual do Aimsun Next usa uma versão simplificada que consiste em uma função de custo de link definida como:
Onde \(c_{it}^{k+1}\) é o custo usando o link i no tempo \(t\) na iteração \(k+1\), e \(c_{it}^k\) e \(c_{it}^k\) correspondem, respectivamente, aos custos esperados e experimentados dos links neste intervalo de tempo a partir de iterações anteriores.
Abordagens algorítmicas para DUE¶
Pode-se demonstrar que a abordagem DUE pode ser implementada em termos da resolução do seguinte modelo matemático:

E as equações de balanceamento de fluxo

Onde, como antes, \(f_{rsp}(t)\) é o fluxo no caminho \(p\) de \(r\) para \(s\) origem de partida \(r\) no intervalo de tempo \(t\), τ\(_{rsp}(t)\) é o custo real do caminho a partir de \(r\) para \(s\) na rota \(p\) no intervalo de tempo \(t\), θ\(_{rs}(t)\) é o custo do caminho mais curto de \(r\) para \(s\) partindo da origem \(r\) no intervalo de tempo \(t\), \(P_{rs}(t)\) é o conjunto de todos os caminhos disponíveis a partir de \(r\) para \(s\) no intervalo de tempo \(t\),  é o conjunto de todos os pares origem-destino \((r,s)\) na rede e \(d_{rs}(t)\) é a demanda (número de viagens) de \(r\) para \(s\) no intervalo de tempo \(t\). Pode-se demonstrar que isso é equivalente a resolver um problema de desigualdade variacional de dimensão finita que consiste em encontrar um vetor de fluxos de caminho f* tal que:
é o conjunto de todos os pares origem-destino \((r,s)\) na rede e \(d_{rs}(t)\) é a demanda (número de viagens) de \(r\) para \(s\) no intervalo de tempo \(t\). Pode-se demonstrar que isso é equivalente a resolver um problema de desigualdade variacional de dimensão finita que consiste em encontrar um vetor de fluxos de caminho f* tal que:

Wu et al. 1991, Wu et al. 1998a and 1998b, prove que isso é equivalente a resolver a inequação variacional discretizada:
Onde  é o conjunto de todos os caminhos disponíveis. Diversos algoritmos foram propostos para resolver essa desigualdade variacional a partir de algoritmos de projeção: (Wu et al 1991, Wu et al. 1998a, Wu et al. 1998b, Florian et al. 2001) ou métodos de direções alternadas, Lo e Szeto 2002, a várias versões do Method of Successive Averages (MSA), Tong and Wong 2000, Varia e Dhingra 2004, Florian et al 2002, Mahut et al. 2003a, Mahut et al. 2003b, e Mahut et al. 2004. O procedimento MSA redistribui os fluxos entre os caminhos disponíveis em um procedimento iterativo que, na iteração n, calcula um novo caminho mínimo a partir da origem \(r\) ao destino \(s\) no intervalo de tempo \(t\), \(c_{rs}(t)\), então o processo de atualização dos fluxos dos caminhos é:
é o conjunto de todos os caminhos disponíveis. Diversos algoritmos foram propostos para resolver essa desigualdade variacional a partir de algoritmos de projeção: (Wu et al 1991, Wu et al. 1998a, Wu et al. 1998b, Florian et al. 2001) ou métodos de direções alternadas, Lo e Szeto 2002, a várias versões do Method of Successive Averages (MSA), Tong and Wong 2000, Varia e Dhingra 2004, Florian et al 2002, Mahut et al. 2003a, Mahut et al. 2003b, e Mahut et al. 2004. O procedimento MSA redistribui os fluxos entre os caminhos disponíveis em um procedimento iterativo que, na iteração n, calcula um novo caminho mínimo a partir da origem \(r\) ao destino \(s\) no intervalo de tempo \(t\), \(c_{rs}(t)\), então o processo de atualização dos fluxos dos caminhos é:

Dependendo dos valores dos coeficientes de ponderação αn, diferentes esquemas MSA podem ser implementados Carey and Ge 2007. Talvez o valor mais típico seja:

Um algoritmo MSA modificado interessante é descrito em Varia e Dhingra 2004, em que o coeficiente de ponderação leva em conta um comprimento de passo variável que depende dos tempos de viagem atuais dos caminhos:

Uma das possíveis desvantagens computacionais dessas implementações de MSA é o número crescente de caminhos no caso de redes grandes; para evitar isso no caso das atribuições DTA no Aimsun Next, o usuário tem a opção de especificar o número máximo K de caminhos a manter para cada par origem-destino; portanto, ao implementar o MSA no Aimsun Next, considerou-se que seria desejável manter esse recurso.
Várias implementações MSA modificadas foram propostas para manter o controle sobre o número de caminhos em algoritmos MSA, Peeta e Mahmassani 1995, Sbayti et al. 2007, porém, possivelmente uma das mais eficientes computacionalmente é a proposta por Florian et al. 2002 (veja também Mahut et al. 2003b e 2004) modificando o algoritmo MSA para manter limitado o número de caminhos alternativos a considerar para cada par origem-destino. Esta variante do algoritmo inicializa o processo com base em um esquema de carregamento incremental que distribui a demanda entre os caminhos mais curtos disponíveis; o processo é repetido por um número predeterminado de iterações, após o qual nenhum novo caminho é adicionado e a fração correspondente da demanda é redistribuída de acordo com o esquema MSA. O MSA modificado funciona da seguinte forma:
Seja K o número máximo de iterações para calcular novos caminhos:
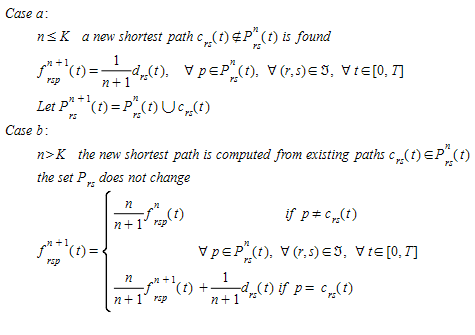
Esta é a versão do algoritmo MSA implementada no Aimsun Next. No entanto, considerando a possibilidade de repetir caminhos mais curtos de uma iteração para a próxima para manter um máximo de K diferentes caminhos mais curtos, uma implementação adequada do algoritmo requer que o número de iterações n é definido por par OD e intervalo de tempo.
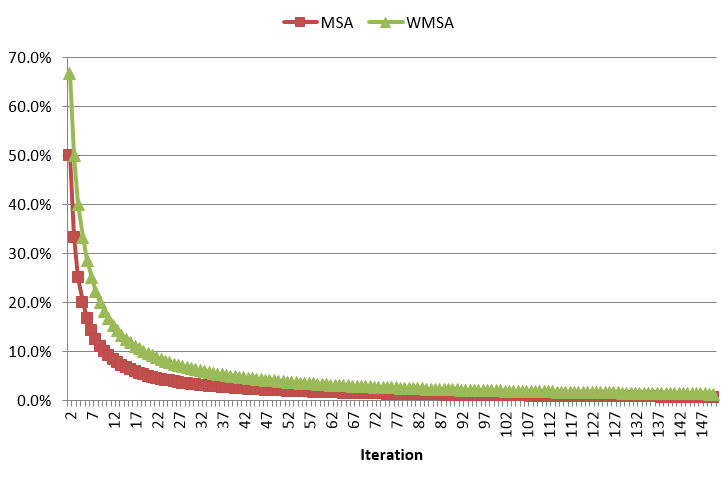
No Aimsun Next, está disponível uma modificação do algoritmo MSA chamada WMSA, proposta por Liu et all 2007. O algoritmo MSA na iteração n, 1/n da demanda é deslocada e, em WMSA 2/(n+1) da demanda é deslocada. A próxima figura mostra a quantidade de demanda deslocada em função do número da iteração.
O critério de convergência¶
Todas as abordagens propostas para DUE são baseadas em procedimentos de simulação para o processo de carregamento da rede e, portanto, são de natureza heurística, de modo que nenhuma prova formal de convergência pode ser fornecida. Consequentemente, uma forma de determinar empiricamente se a solução alcançada pode ser interpretada em termos de um DUE, no sentido de que "os tempos reais de viagem experimentados pelos viajantes que partem no mesmo horário são iguais e mínimos", pode ser baseada em uma versão ad hoc da função Relative Gap proposta por Janson 1991:
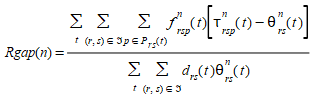
Onde
- \(f_{rsp}^n(t)\) é o fluxo no caminho p partindo da origem \(r\) no instante \(t\) na iteração \(n\) com destino s.
- τ\(_{rsp}^n(t)\) é o custo experimentado ou instantâneo do caminho p.
- θ\(_{rs}^n(t)\) é o custo do caminho mais curto para caminhos que partem da origem r no instante t na iteração n com destino s.
A diferença τ\(_{rsp}^n(t)\) - θ\(_{rs}^n(t)\) mede o custo excedente experimentado pelo fato de usar um caminho p em vez disso, o caminho mais curto.
Em versões anteriores, o custo do caminho mais curto na fórmula RGap para caminhos que partem da origem θ\(_{rs}^n(t)\) era o do caminho com o custo mínimo entre o conjunto de caminhos usados. A partir do Aimsun Next 22, este é o custo do caminho mais curto recém-calculado com os custos atualizados ao final da iteração.
Isso é mais preciso e permite uma melhor avaliação do RGap para pares OD nos quais todos os veículos usam o mesmo caminho. No entanto, você pode observar que o RGap no Aimsun Next 22 é maior e que o DUE realiza mais iterações para convergir. Se isso for uma preocupação, você ainda poderá usar o cálculo anterior adicionando uma nova variável de experimento com o nome $DTARGAPEVALUATION e um valor de RGAP20.
A razão mede o custo excedente total em relação ao custo mínimo total se todos os viajantes tivessem usado os caminhos mais curtos.
O Aimsun Next contém vários critérios de parada como parte do processo DUE. São eles:
-
Número máximo de iterações - O processo DUE será interrompido após o número máximo de iterações, mesmo que as outras condições de parada não sejam atendidas.
-
Um Relative Gap global - Este é o principal critério de parada. Ele pode ser definido no aba Dynamic Traffic Assignment do editor de experimento para um número específico n de iterações consecutivas.
-
Um critério opcional de fluxo (a caixa de seleção correspondente deve ser ativada primeiro) - Uma porcentagem x% de links com uma variação de fluxo abaixo de y% por pelo menos n iterações consecutivas.
-
Um critério opcional de custo (a caixa de seleção correspondente deve ser ativada primeiro) - Uma porcentagem x% de links com uma variação de custo abaixo de y% por pelo menos n iterações consecutivas.
Se os critérios de fluxo/custo forem usados, a convergência é atingida quando tanto o critério de gap quanto os critérios de fluxo/custo são cumpridos, ou quando o número máximo de iterações é calculado.
Além disso, é possível definir uma matriz de gap relativo alvo. Isso define um RGap alvo para cada par OD. Se o RGap de um determinado par OD for menor que o alvo, nenhum novo caminho será calculado para esse par OD na próxima iteração, e os caminhos atuais e os percentuais atuais de uso desses caminhos serão usados. Se o RGap de um determinado par OD for maior que o alvo, novos caminhos serão calculados para esse par OD na próxima iteração e o uso dos caminhos será atualizado. Este não é um critério de parada e não substitui o valor global de RGap.
Para usar uma matriz de gap relativo, o usuário deve criar um objeto de matriz e definir o conteúdo para Relative Gap. Isso deve então ser selecionado na aba de atribuição dinâmica de tráfego do experimento.
O framework computacional no Aimsun Next¶
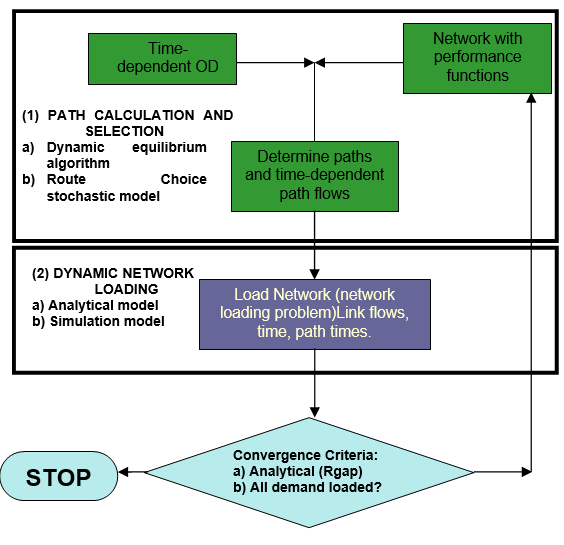
O arcabouço computacional para DTA proposto por Florian 2001 e Florian 2002 consiste em dois componentes:
- Um método para determinar as taxas de fluxo dependentes do caminho nos caminhos da rede
- Um método de Dynamic Network Loading, que determina como esses fluxos de caminho dão origem a volumes de arcos dependentes do tempo, tempos de viagem em arcos e tempos de viagem em caminhos.
Isso foi implementado no Aimsun Next conforme mostrado no diagrama conceitual abaixo. Quando a caixa de diálogo Dynamic Scenario é selecionada, o sistema oferece três opções: microscópica, mesoscópica e híbrida, que determinam a abordagem de simulação na qual o carregamento da rede se baseia; e, para cada carregamento de rede, são oferecidas duas alternativas: DTA ou DUE.
- DTA baseia-se na abordagem heurística descrita usando modelos estocásticos de escolha de rota.
- DUE baseia-se na heurística iterativa descrita acima e nos algoritmos MSA ou baseados em gradiente.
O critério de convergência depende da alternativa selecionada: a conclusão do carregamento da demanda no DTA e a conclusão do número de iterações definido ou quando o Rgap a função atinge a precisão desejada.
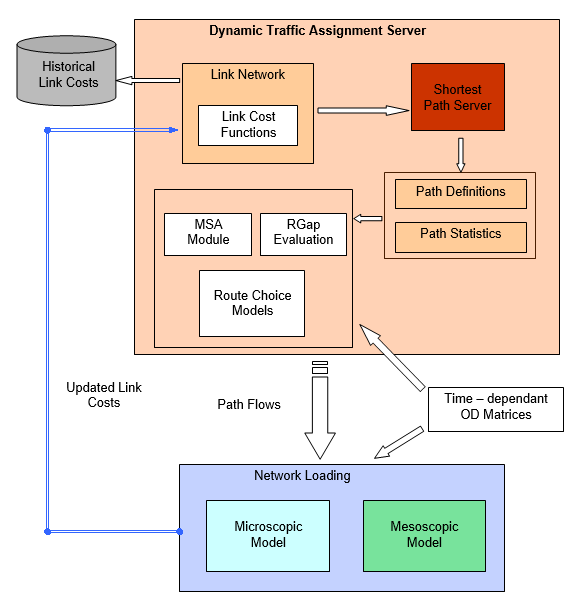
Uma implementação computacional eficiente dessa abordagem conceitual exige que a parte analítica do processo, isto é, o cálculo e a seleção de caminhos, seja implementada independentemente do processo de carregamento dinâmico da rede selecionado para implementar a parte heurística da Alocação Dinâmica de Tráfego. Em outras palavras, quando a consistência da rede se mantém para a representação meso e micro, o cálculo de caminhos baseado em custos de links dependentes do tempo deve ser o mesmo, e a única diferença dependerá dos valores dos argumentos das funções de custo dos links, que serão fornecidos, respectivamente, pela simulação mesoscópica de tráfego ou pela simulação microscópica de tráfego usada para o Carregamento Dinâmico da Rede.
A arquitetura de software integrada do Aimsun Next permite esse cálculo comum de caminhos mínimos, dado que as representações da rede compartilham o mesmo modelo de objetos e o mesmo banco de dados do modelo, e os veículos podem ser únicos e os mesmos para meso e micro se o modelo meso for baseado em uma abordagem que individualiza os veículos; então, o cálculo de caminhos pode ser realizado por um "servidor de caminho mínimo" comum e os caminhos são os mesmos em ambos os níveis. A abordagem conceitual para atribuição dinâmica de tráfego proposta na figura anterior foi implementada em termos de um "Servidor de Atribuição Dinâmica de Tráfego". A estrutura desse servidor é mostrada abaixo.
Parâmetros DUE ¶
Antes de executar o modelo, os parâmetros do Dynamic User Equilibrium são definidos nas propriedades do Experimento em aba Dynamic Traffic Assignment.
Estimativa das taxas de fluxo de caminhos ¶
A nova abordagem implementa a estimação das taxas de fluxo nos caminhos com base em um Dynamic User Equilibrium (DUE). Este processo implementa um processo iterativo para minimizar o Gap Relativo aplicando o método da médias sucessivas (MSA),
Iniciar e Continuar um Equilíbrio Dinâmico do Usuário¶
Continuar ou iniciar uma DUE a partir de uma DUE anterior ou de uma Macro Assignment usando um arquivo APA é possível independentemente de a rede ter sido alterada ou não. A primeira iteração ao iniciar ou continuar uma DUE usando uma alocação anterior é usada para calcular os custos dos links. Se a rede tiver sido alterada, o Corretor de APA pode ser usado para garantir que a rede e o arquivo APA sejam consistentes. O APA fixer verifica um arquivo APA e o "corrige" com base na configuração atual da rede, para que ele possa ser usado em uma versão modificada da rede. Isso contorna a restrição de que os caminhos só podem ser específicos de uma versão da topologia da rede. O APA fixer implementa as seguintes alterações:
- Adição e remoção de centroides e/ou conexões
- Adição, remoção ou modificação de movimentos de conversão e/ou definições de entidades de conexão de movimentos de conversão
- Adição, remoção ou modificação de seções
O corretor APA é uma ferramenta de linha de comando que recebe como entrada:
- O arquivo APA original
- A rede revisada
- O identificador do experimento na rede revisada.
O novo arquivo APA é gerado em um novo diretório "correctedapa" localizado no mesmo diretório do APA original.
Nos três casos, o corretor de APA assegura que o arquivo APA resultante será compatível com a nova rede e assegurará que a atribuição anterior seja consistente. Assim, para cada origem e destino, a atribuição soma 100%.
Resultado Incremental¶
Para melhorar o processo geral de convergência e obter rotas melhores, um resultado incremental pode ser usado. A diferença entre um resultado normal e um resultado incremental é o número de iterações externas. Em um resultado normal há apenas uma iteração externa usando a demanda definida no cenário. Em um resultado incremental, o usuário pode especificar um número de iterações externas com diferentes percentuais crescentes. O percentual de cada iteração externa define a proporção da demanda que será usada. As primeiras iterações têm demanda menor e essa demanda é aumentada a cada iteração externa, com 100% da demanda na última iteração.
O objetivo é desenvolver o roteamento em uma rede não congestionada para evitar a distorção no roteamento provocada pelo excesso de congestionamento na simulação.