Calibração e Validação¶
Em sistemas de tráfego, o comportamento do sistema real é geralmente definido em termos das variáveis de tráfego, fluxos, velocidades, ocupações, comprimentos de fila e assim por diante, que podem ser medidos por detectores de tráfego em locais específicos da rede viária. Para validar o modelo de simulação de tráfego, o simulador deve ser capaz de emular o processo de detecção de tráfego e produzir uma série de observações simuladas. Uma comparação estatística com as medições reais é então usada para determinar se a precisão desejada na reprodução do comportamento do sistema foi alcançada.
Os principais componentes de um modelo de microssimulação de tráfego são:
- A rede viária
- A representação geométrica da rede viária de tráfego, as seções viárias, as interseções e os movimentos de conversão.
- A inclusão de esquemas de gerenciamento de tráfego que controlam velocidades dos veículos, movimentos de conversão permitidos e esquemas de controle semafórico (fases, tempos, defasagens) e os detectores de via, semáforos e Variable Message Signs associados.
- Demanda de tráfego:
- Padrões de fluxo de entrada nas seções de entrada do modelo viário e porcentagens de movimentos de conversão nas interseções
- Matrizes OD fatiadas por tempo para cada classe de veículo
- Os modelos de atribuição dinâmica de tráfego que controlam a escolha de rota.
- Modelos comportamentais de veículos individuais
- Car following, mudança de faixa, aceitação de gap, etc.
Todos esses componentes interagem e nenhum deve ser considerado isoladamente para calibrar e validar uma rede. No entanto, há um processo na construção de um modelo e há ações apropriadas realizadas para calibrá-lo em cada etapa. Existem diversas diretrizes para auxiliar os modeladores a atender às expectativas de suas partes interessadas na construção de modelos. Exemplos incluem:
- FHWA (EUA) Caixa de Ferramentas de Análise de Tráfego A Seção 3, em particular, aborda o uso de ferramentas de microssimulação
- Transport for London (UK) Diretrizes de Modelagem da TfL Que estabelecem orientações de modelagem e auditoria para avaliações de transporte.
Uma revisão das diretrizes pode ser encontrada no Projeto Multitude Caso para Diretrizes.
Este resumo da calibração do modelo discutirá 4 etapas:
- Verificações Estáticas Construa o modelo da rede viária e verifique-o estaticamente.
- Verificações dinâmicas em uma simulação em execução.
- Estimativa de Demanda de Viagens.
- Comparação Estatística com dados observados.
Construção do Modelo e Verificação Estática ¶
O editor gráfico no Aimsun Next foi projetado para auxiliar o usuário na construção do modelo da rede viária. As redes podem ser construídas sobrepondo manualmente seções e nós sobre uma imagem de fundo importada de um GIS, de um banco de dados de mapas (Consulte o Seção de Importadores e Exportadores ou podem ser construídas por importação direta para o Aimsun Next a partir de bases de dados cartográficos, como OpenStreetMap(OSM) que também importará as características viárias, como as classificações das vias, as velocidades e faixas, e conectará as seções viárias nas interseções . Observe, no entanto, que embora a importação diretamente do OSM também possa trazer muito mais do que um fundo gráfico, ainda há a necessidade de verificar e ajustar manualmente a rede importada.
A figura abaixo ilustra o processo de uso do editor gráfico para construir um modelo urbano sobre uma imagem de fundo.
Depois que a rede tiver sido criada, as seções corretamente configuradas com classificações viárias, restrições de faixa e velocidade, e os diversos artefatos como VMS, Signals, detectores e pontos de ônibus tiverem sido incluídos, a rede poderá ser verificada estaticamente com o Ferramenta Verificar e Corrigir Rede. Isso validará a rede, verificando sua consistência e quaisquer erros, como seções desconectadas, movimentos de conversão conflitantes etc. Dessa forma, o Aimsun Next fornecerá um nível mais alto de validação semiautomatizada da rede do que o que pode ser obtido por inspeção visual por um modelador.
Verificações dinâmicas ¶
Durante uma simulação, o verificações dinâmicas que podem ser realizadas são usar as saídas da replicação para observar o número de veículos perdidos na simulação ou que perderam um movimento de conversão, o que é indicativo de problemas de calibração. Verificações semelhantes com modos de visualização incluem procurar áreas de frenagem intensa, novamente com um modo de visualização, ou simplesmente observar a simulação em modo animado com conhecimento prévio da situação na via.
Estimativa da Demanda de Viagens¶
A Demanda de Viagens é, possivelmente, o componente mais importante do modelo para alcançar a calibração. Estimar a demanda a partir de dados observados é uma parte significativa de um projeto de modelagem de transportes, e o Aimsun Next oferece algumas ferramentas para auxiliar nesse processo. Observe, contudo, que estimar a demanda para um modelo pequeno pode ser tão simples quanto inserir um conjunto de contagens de seções e contagens de movimentos de conversão em uma Estado do tráfego. Alternativamente, isso pode exigir fluxos de trabalho complexos em um ambiente multinível Quatro Etapas modelo com várias iterações para gerar uma estimativa robusta da demanda para múltiplas classes de usuário em matrizes desagregadas. As ferramentas fornecidas pelo Aimsun Next para auxiliar na calibração da demanda do modelo são descritas aqui; o fluxo de trabalho e os processos de gerenciamento do projeto que controlarão como e quando elas são aplicadas não são.
Edição de Matrizes¶
O Editor de matriz OD contém ferramentas para ajustar matrizes OD. Estas estão documentadas no Seção de Operações para o editor OD e estão parcialmente resumidas aqui.
-
Dividir: Cria novas matrizes por divisão temporal da matriz original. Normalmente usado na calibração quando a demanda de viagens varia ao longo do tempo e uma única matriz é inadequada,
-
Adicionar: Adiciona viagens às células da matriz. Usando os critérios de seleção, isso pode ser usado para fazer ajustes incrementais manuais na demanda para investigar opções de calibração
-
Multiplicar: Multiplica as viagens na matriz por um fator dado para aumentar ou reduzir a demanda total.
-
Transpor: Transpõe a matriz ou parte dela. Normalmente usado para gerar uma matriz de retorno, ou seja, transpor a matriz de deslocamentos pendulares da manhã para gerar a matriz da tarde, que pode ser usada na simulação ou comparada com uma matriz existente.
-
Furness: Ajusta uma matriz após fatores de crescimento terem sido adicionados a alguns extremos de viagem. Normalmente para distribuir viagens se uma opção de calibração exigir que os números de viagens para ou a partir de um centroide sejam variados.
-
Correção: Esta operação aplicará à matriz atual as mesmas alterações multiplicativas que foram feitas de uma matriz original para uma matriz manipulada. Usada na calibração para garantir que as matrizes possam ser alteradas de forma consistente, se isso for apropriado.
Ajuste de matriz¶
A Cenário de Ajuste OD Estático é um procedimento para ajustar uma matriz OD a priori usando contagens de tráfego. Ele é usado para ajustar uma matriz derivada de previsões de demanda para que concorde com observações de tráfego da via. O Cenário de Ajuste Estático contém opções para agrupar detectores ou para agrupar conexões de centroides para melhorar a robustez das estimativas de ajuste. Essas opções devem ser consideradas ao usar este cenário.
Localização do Detector¶
O Ferramenta de Localização de Detectores é uma ferramenta complementar ao Static Adjustment Scenario. O processo de ajuste depende de uma cobertura adequada de dados dos detectores viários para garantir que a maioria das viagens seja observada e que o ajuste não esteja alterando números de viagens não observados. A Detector Location Tool analisa a cobertura das viagens e sugere onde detectores viários poderiam ser posicionados.
Uma aplicação seria criar o modelo e executá-lo com uma demanda falsa de uma viagem entre cada par OD para avaliar o roteamento inicial e, com isso, aplicar a Ferramenta de Localização de Detectores para orientar o exercício de coleta de dados.
Ajuste de Partida¶
O Cenário de Ajuste de Partida é um procedimento para criar uma demanda perfilada a partir de uma demanda estática. Em um modelo de microssimulação ou em uma simulação mesoscópica, a demanda de viagens pode ser representada em intervalos de tempo curtos (tipicamente minutos, em comparação com as ubíquas matrizes de 1 hora usadas em uma atribuição estática). Isso reflete com mais precisão a verdadeira natureza da demanda de viagens, que é controlada por fatores como "a viagem escolar" ou um horário de saída do trabalho ou de um evento.
O Cenário de Ajuste de Partida divide as matrizes OD em um conjunto de matrizes com intervalos de tempo mais curtos e ajusta a demanda em cada uma para corresponder ao perfil variável no tempo dos dados observados, levando em conta o tempo de viagem entre o ponto de partida da viagem e o ponto de observação dos dados. Criar matrizes perfiladas ajudará na calibração com dados medidos em intervalos de tempo curtos ou, por exemplo, na modelagem da formação e dispersão de uma fila.
Validação¶
Depois que uma simulação baseada em veículos tiver sido executada ou uma média de simulações tiver sido calculada, o editor de replicação, o editor de resultados ou o editor de médias terá dados na pasta Validation.
O objetivo da pasta Validation é permitir comparar os resultados da simulação com Dados reais definido para o Cenário.
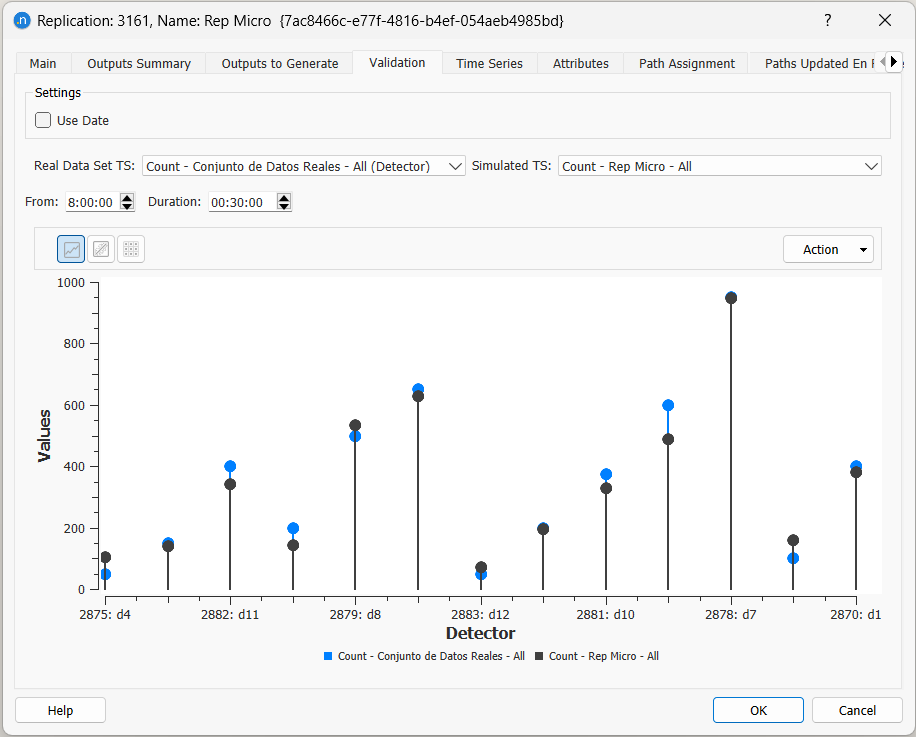
Uma vez definido o conjunto de dados reais e disponibilizados os dados simulados, a pasta Validation ficará como a mostrada na figura abaixo.
O Real Data Set Time Series e a Simulated Time Series são selecionados no menu suspenso e exibidos de 3 maneiras:
- Como gráfico
- Como uma análise de regressão
- Como tabela
Para exibir os dados do conjunto de dados reais vs. os dados simulados como um gráfico, clique no ícone de gráfico na figura abaixo.
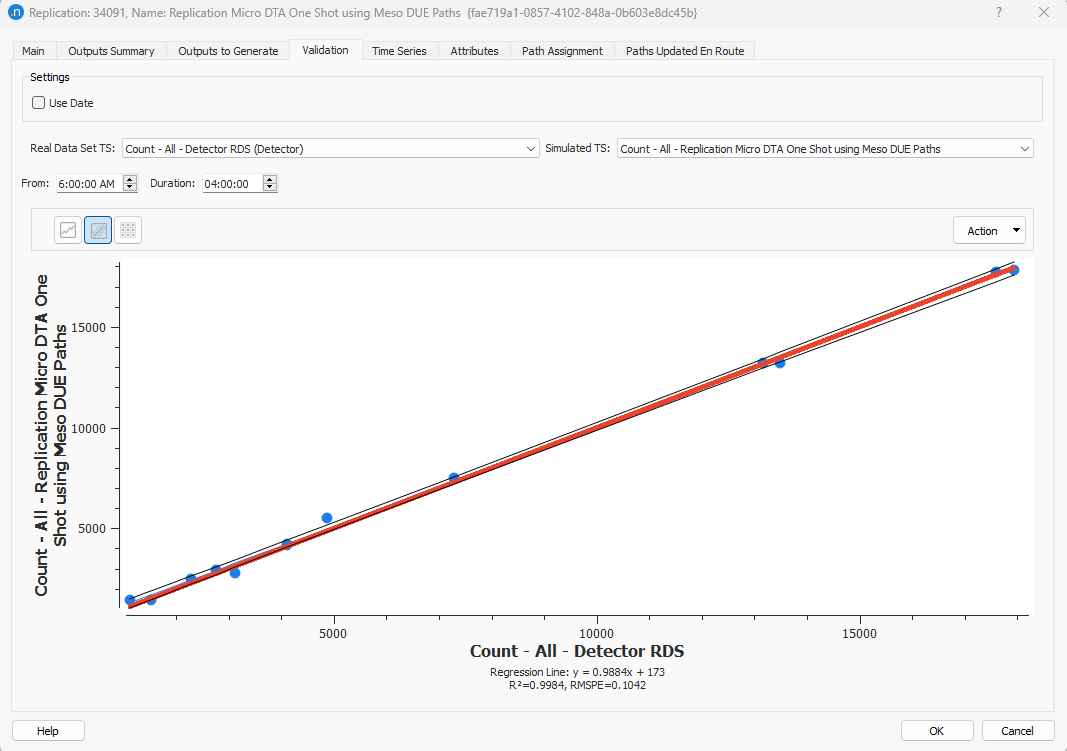
Para exibir uma regressão do conjunto de dados reais em relação aos dados simulados, clique no ícone da linha de regressão na figura abaixo. São exibidas informações sobre a linha de regressão linear, R2 (Coeficiente de Determinação, R quadrado) e RMSPE.
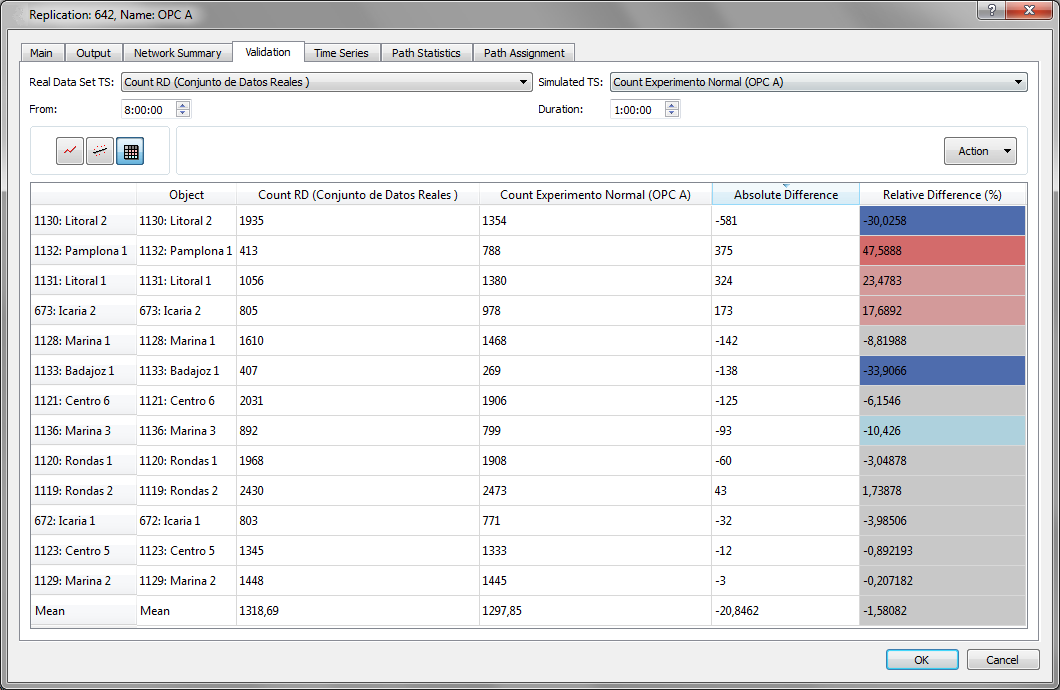
A terceira opção é exibir os dados do conjunto de dados reais versus os dados da simulação em uma visualização de tabela. O Aimsun Next calcula automaticamente a diferença absoluta e a diferença relativa de cada par de valores e colore as células da diferença relativa dependendo de seu valor, para dar uma impressão visual facilmente assimilável de onde estão os principais desvios.
Além das informações exibidas na pasta Validation, duas outras estatísticas de validação podem ser calculadas:
- estatística de Theil
- estatística GEH
Essas estatísticas são descritas em mais detalhes na Métodos Estatísticos para Validação de Modelos seção.
U de Theil¶
A estatística U de Theil é uma medida de precisão relativa que compara os resultados simulados (Y) com os dados reais (X). Ela é calculada da seguinte forma
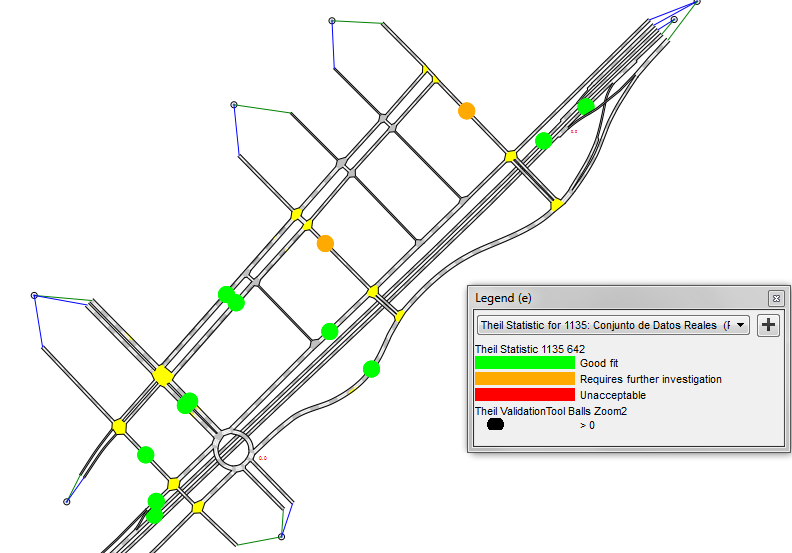
Para calcular a estatística de Theil para cada detector, selecione a opção Ação: Calcular Theil. Uma vez selecionados, dois modos de visualização serão criados automaticamente.
Estatística de Theil para replicação. Onde a estatística de Theil é calculada para cada detector e retorna 4 valores possíveis:
- Preto - Não aplicável. Não há dados para o detector.
- Verde - Bom ajuste. O U de Theil está entre 0 e 0,2.
- Laranja - Requer investigação adicional. O U de Theil está entre 0.2 e 0.7.
- Vermelho - Inaceitável. O U de Theil é maior que 0,7.
Estatística de Theil discreta. Isto é semelhante ao modo de visualização acima, com a diferença de que inclui o sinal da diferença entre medições reais e simuladas.
O modo de visualização Theil's U Statistic é selecionado na vista 2D conforme exibido na Figura abaixo.
Saídas mais detalhadas de detectores e comparações com dados reais podem ser encontradas no aba Séries Temporais para detectores individuais.
GEH¶
O GEH Estatística é usado em engenharia de tráfego para comparar dois conjuntos de dados de tráfego. Embora sua forma matemática seja semelhante a um teste qui-quadrado, ele não é um teste estatístico verdadeiro. É uma fórmula empírica que se mostrou bastante útil.
É definido como:
em que m e o são os fluxos simulados e observados, respectivamente.
Para calcular a estatística GEH para cada detector, selecione a opção Ação: Calcular GEH. Modos de visualização semelhantes são criados automaticamente como para a estatística de Theil. Os limites GEH são definidos usando os seguintes intervalos:
- 0 - 5: Bom ajuste
- 5 - 10: Requer Investigação Adicional
- > 10: Inaceitável
Dois tipos de modos de visualização são criados automaticamente para a estatística GEH. O modo de visualização base Estatística GEH mostra a estatística usando uma exibição simples em Vermelho, Âmbar e Verde.
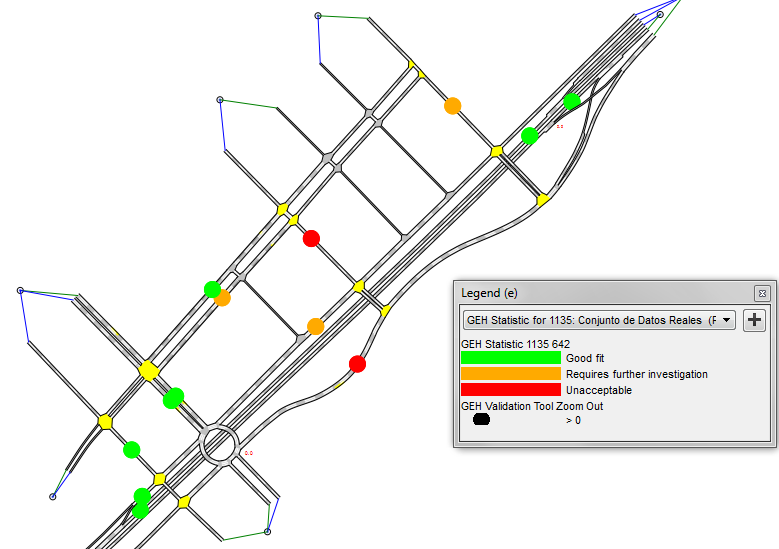
O Estatística GEH Discreta modo de visualização mostra os mesmos dados e inclui informações sobre o sentido da discrepância. Os valores são exibidos como acima, e a legenda se expande para os seguintes valores:
- 0 - 5: Bom ajuste (Verde, valor 0)
- 5 - 10 And Observado < Resultado: Requer investigação - Superior (valor laranja 1)
- 5 - 10 And Observado > Resultado: Requer investigação - Inferior (valor Azul 3)
- > 10 And Observado < Resultado: Inaceitável - Superior (Valor vermelho 2)
- > 10 And Observado > Resultado: Inaceitável - Inferior (valor Roxo 4)
Padrões de detecção¶
Padrões de detecção produzir um efeito reproduzível em um detector como se um veículo de um determinado tipo, comprimento (e possivelmente linha de transporte coletivo) tivesse estado presente em um determinado detector, em um determinado momento, por uma determinada duração, trafegando a uma determinada velocidade. Os Padrões de Detecção permitem que coleções de eventos de detecção sejam armazenadas e reproduzidas em simulações posteriores. Padrões de detecção são úteis, entre outras aplicações, para testar planos de controle adaptativo sem aplicar uma demanda de tráfego, dando assim ao desenvolvedor controle completo sobre as entradas de um plano de controle para auxiliar uma depuração bem-sucedida.
Modelos de Detecção¶
Modelos pode ser usado quando há necessidade de reproduzir o mesmo evento de detecção, ou um evento semelhante, muitas vezes.