Gerenciando Tráfego¶
Os simuladores baseados em veículos do Aimsun Next incluem suporte a operações de gerenciamento de tráfego para modificar as condições da rede de tráfego, afetar o comportamento dos motoristas ou simular eventos na rede de tráfego.
Uma estratégia de gestão de tráfego consiste em um conjunto de políticas que são aplicadas a uma rede de tráfego para resolver um problema ou alcançar um objetivo, por exemplo, reduzir congestionamentos em uma hora de pico ou gerenciar o tráfego em torno de obras viárias. Cada política tem uma ação ou um conjunto de ações complementares; por exemplo, o fechamento de uma faixa pode ser combinado com uma permissão correspondente para que veículos privados usem uma faixa de transporte público, ou um incidente que resulte no fechamento de uma faixa, modelado em um lado de uma via de pista dupla, pode ser combinado com uma redução de velocidade no outro lado da via de pista dupla para simular o comportamento de "rubber necking" de motoristas curiosos.
Consulte os disponíveis Condições de Tráfego e Políticas de Estratégia por mecanismo de simulação.
Nota: Estratégias de gestão de tráfego ou condições de tráfego só podem ser aplicadas a simulações dinâmicas (Microscopic, Mesoscopic, Hybrid Macro-Meso e Hybrid Meso-Micro).
Autoridades e Problemas¶
As estratégias destinam-se a resolver Problemas onde estes Problemas são responsabilidade de uma ou mais entidades de transporte Autoridades. No Aimsun Next, uma estratégia pode conter múltiplos Políticas onde cada política pode pertencer a um diferente Autoridade. Portanto, a simulação fornece ferramentas para incluir no modelo a administração de estratégias de gerenciamento de tráfego, bem como a implementação dessas estratégias.
Autoridades¶
Um Autoridade é o órgão responsável por aprovar uma política. Uma estratégia pode ter várias políticas, sendo cada política de responsabilidade de uma Autoridade diferente. Para aplicar uma estratégia completa, todas as Autoridades devem concordar. Isso normalmente ocorre em redes de grande escala, por exemplo, redes que abrangem limites administrativos ou geográficos.
O simulador permite experimentar variações desse acordo. Uma estratégia é ativada no nível do cenário, mas as políticas contidas nessa estratégia são ativadas no nível do experimento. Portanto, é possível configurar um experimento para testar o que acontece se todas as Autoridades concordarem ou se apenas algumas delas derem permissão; as Autoridades são, portanto, usadas de duas maneiras:
- Owner Authority: Aquela que gerencia (que deseja aplicar) a estratégia. Isto é aplicável no editor Strategy.
- Autoridade Operacional: aquela que deve autorizar as alterações a serem aplicadas na rede. Isso é usado no editor de Políticas.
As Authorities cumprem apenas uma função informativa, embora scripts possam ser usados para automatizar quais políticas são implementadas se apenas algumas, mas não todas, as Authorities puderem atuar quando a estratégia for aplicada.
As autoridades são criadas a partir da Janela do Projeto Gestão de Tráfego menu de contexto e não têm outras propriedades além de seu nome, ID externo e descrição, e quaisquer atributos atribuídos por scripts.

Problemas¶
Problemas são criados a partir da Janela do Projeto Gestão de Tráfego menu de contexto. Eles contêm a descrição de um problema de gerenciamento de tráfego para o qual serão testadas estratégias para resolvê-lo no modelo de tráfego. Os problemas apenas fornecem informações sobre o propósito de uma estratégia e não contribuem para a simulação.
Edite a descrição do problema no campo de texto, disponível no Editor de Problemas.

Estratégias, Políticas e Condições de Tráfego¶
A Estratégia é um contêiner para uma coleção de políticas que serão aplicadas, no todo ou em parte, à solução do Problema. A Política é um componente de uma Estratégia e pode haver várias políticas coordenadas para implementar uma única estratégia. As políticas contêm ações que podem ser alterações na rede de tráfego ou no gerenciamento da rede. As políticas podem ser implementadas por meio de múltiplas ações complementares, ou seja, alterações coordenadas de uso de faixa e restrições de velocidade.
A Condição de tráfego é semelhante a uma política, pois é uma coleção de ações aplicadas com base em um conjunto de gatilhos.
A diferença entre uma condição de tráfego e uma estratégia com um conjunto de políticas é que as condições de tráfego são usadas para representar alterações atuais na rede que não fazem parte de nenhuma ação de gerenciamento de tráfego. Não há escolha de gerenciamento quanto a serem aplicadas ou não, pois representam eventos que ocorrem em uma rede. Na prática, as condições de tráfego simulam eventos inevitáveis na rede.
Por exemplo, uma redução de velocidade pode ser usada por um operador para aumentar a capacidade de uma rodovia durante um horário de pico. Essa alteração será modelada como uma ação dentro de uma política, pois é planejada e controlada. No entanto, uma redução de velocidade também pode ocorrer devido a acidentes. Nesse caso, a limitação está presente na rede, mas não foi planejada nem decorreu de ações dos gestores da rede viária. Nesse caso, deve-se usar uma condição de tráfego.
Estratégias¶
As estratégias são criadas a partir da Janela do Projeto Gestão de Tráfego menu de contexto conforme mostrado abaixo.

As estratégias podem depender de uma Autoridade Responsável e ser usadas para um Problema. Mais informações sobre Autoridades e Problemas são fornecidas no Autoridades seção e na Problemas seção.

Políticas¶
Uma Política é uma coleção de ações que são ativados juntos ao mesmo tempo.
As ações têm apenas um único efeito e são os blocos de construção usados para reproduzir uma situação na rede ou especificar uma ação do motorista. Às vezes, uma situação deve ser codificada usando mais de uma ação. As políticas são criadas a partir do Estratégias menu de contexto.
As políticas são ativadas sob certas condições, horários ou gatilhos. Quando uma política é ativada, todas as ações que ela define são aplicadas. Quando uma política é desativada, todas as ações relacionadas a ela também são desativadas. A ativação e desativação de uma política podem ser feitas com base em quatro condições possíveis:
- Always: A política é ativada no início da simulação ou no início do aquecimento (se o aplicar no aquecimento opção estiver ativada) e nunca é desativada.
- Tempo: A política é ativada em um determinado momento (o De parâmetro) e desativado após algum tempo (o Duração parâmetro).
- Acionador: A política é ativada quando ocorre uma condição na rede (quando um gatilho é avaliado como verdadeiro) e desativada quando uma segunda condição ocorre (outro gatilho é avaliado como verdadeiro). Esses dois gatilhos são selecionados no Iniciado por e Parado por campos. Diferentes disparadores para diferentes períodos podem ser usados para iniciar a política adicionando intervalos à tabela Started by. Além disso, para o disparador Stopped by, uma Duração Mínima pode ser exigida antes que essas condições de disparo sejam verificadas.
- Externa: A política é acionada por um API.
Quando a simulação cobre mais de 24 horas, e a ativação e desativação são por Time, aplicam-se as seguintes regras:
- Se o horário de término da política ou condição de tráfego for meia-noite ou antes, então ela será repetida todos os dias. Por exemplo, uma política que se aplica das 8AM às 9AM.
- Se o horário de término for após a meia-noite, então a política ou condição de tráfego é executada apenas uma vez. Por exemplo, uma política que começa às 21h e termina às 6h da manhã seguinte. Se a política deve ocorrer todas as noites, ela deve ser definida como duas políticas separadas, uma cobrindo das 21h até a meia-noite e outra cobrindo da meia-noite até as 6h; então elas seguirão a lógica do caso anterior.
O horário de término é calculado automaticamente pelo Aimsun Next, pois Start Time e Duration são conhecidos.
Um Operacional Autoridade pode ser especificado para cada política.

Condições de Tráfego¶
Condições de tráfego são formalmente muito semelhantes a políticas: elas são uma coleção de ações que são aplicadas com base em uma determinada condição. Esta condição pode, como ocorre com uma política, ser aplicada sempre, durante um intervalo de tempo ou com base em acionadores internos ou externos.
Uma condição de tráfego é criada usando o Projeto / Gerenciamento de Tráfego / Novo / Condição de Tráfego opção de menu.
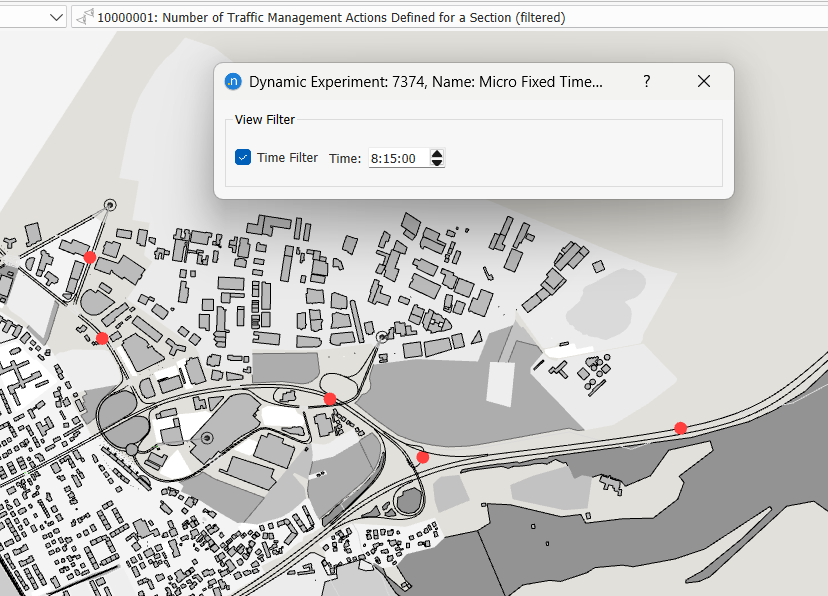
Visualizar e Localizar Ações Ativas¶
Para ver onde as ações de gerenciamento de tráfego foram programadas, selecione o Marcar Locais de Gerenciamento de Tráfego no menu de contexto do Experimento. Isto gerará um novo Modo de Visualização que marcará os objetos que têm ações associadas a eles.
Da mesma forma, se uma seção tiver ações anexadas a ela, elas serão listadas na aba Uso da seção em Editor de Seções.
Quando uma ação começa ou termina; uma mensagem é gerada na janela Log.

Ações¶
Traffic Conditions and Policies podem implantar uma ou várias ações. As ações disponíveis são:
| Ação | Uso em SRC | Uso em DUE | Uso em Meso | Uso em Micro | Uso em Macro–Meso Híbrido |
|---|---|---|---|---|---|
| Fechamento de Faixa | Sim | Sim | Sim | Sim | Sim |
| Fechamento de movimento de conversão | Sim | Influencia apenas os custos dos caminhos | Sim | Sim | Sim* |
| Ativação do Modelo de Cooperação em Movimentos de Conversão | Sim | Sim | Não | Sim | Não |
| Redução de velocidade | Sim | Sim | Sim | Sim | Sim* |
| Movimento de conversão forçado | Sim | Não | Sim | Sim | Sim |
| Forçar Atualização de Caminho em Rota | Sim | Não | Sim | Sim | Sim |
| Mudança de Destino | Sim | Não | Sim | Sim | Sim |
| Park and Ride | Sim | Não | Sim | Sim | Não |
| Incidente na seção | Sim | Sim | Simplificado | Sim | Sim* |
| Incidente Periódico em Seção | Sim | Sim | Simplificado | Sim | Sim* |
| Desativação de Faixa Reservada | Sim | Sim | Sim | Sim | Sim* |
| Alteração do Plano de Controle | Sim | Sim | Sim | Sim | Sim |
| Alteração de Parâmetros Comportamentais da Seção | Sim | Sim | Sim | Sim | Não |
| Alteração de Parâmetros Comportamentais de Movimentos de Conversão | Sim | Sim | Sim | Sim | Não |
| Alteração de Rota de Transporte Público | Sim | Sim | Não | Não | Não |
| Chamada Periódica | Sim | Sim | Sim | Sim | Sim* |
Algumas ações têm um nível de conformidade em que:
- Quando o nível de conformidade = 100, então esta é uma ação obrigatória
- Quando 0 < nível de conformidade < 100, isso representa a probabilidade de que um veículo específico siga a ação
- Quando compliance level = 0, então os veículos seguem a ação de acordo com o nível de aceitação da orientação parâmetro para o Tipo de Veículo.
Em muitas ações, uma seção é necessária e pode ser selecionada na lista suspensa de seções. Como alternativa, clicar em uma seção na visualização 2D principal enquanto o editor de ações estiver aberto selecionará essa seção.
Em ações nas quais os caminhos dos veículos são atualizados devido a fechamentos de seção, fechamentos de movimentos de conversão ou alterações de destino, seu caminho será marcado como "TRJ" no Ferramenta de análise de trajetórias.
Ações marcadas Sim* na coluna Hybrid Macro–Meso têm algumas limitações quando usadas na área macro do modelo híbrido macro–meso. Essas limitações são explicadas em cada ação descrita abaixo.
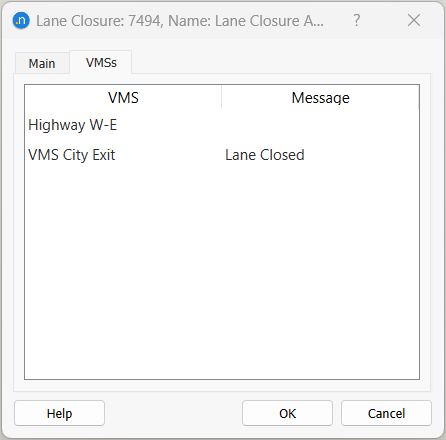
aba VMS¶
Cada ação tem uma aba VMS anexada ao seu editor. O Aimsun Next não requer um VMS para ativar uma ação na simulação, mas na realidade a ação precisa ser comunicada aos motoristas e, muitas vezes, isso é feito por meio de um VMS. Portanto, uma ação na simulação pode ativar uma mensagem em um ou mais VMSs. Isso é feito por razões de apresentação, para demonstrar na visualização 3D que uma placa foi ativada; isso não afeta a simulação.
A aba VMS apresenta uma lista de todos os sinais VMS; a mensagem associada a esta ação é fornecida aqui para cada sinal.
Fechamento de Faixa¶
Esta ação fecha uma faixa em uma seção. Seus parâmetros, mostrados na próxima figura, são a seção, a faixa, o intervalo de segmentos da seção que deve ser fechado e a classe de veículo para a qual ela será fechada. Também é especificada a distância de visibilidade do fechamento da faixa a ser usada no modelo de faixas de destino válidas. Isso controla quando os veículos começam a ajustar seu uso de faixas para levar em conta o fechamento iminente.
Em simulações híbridas macro–meso, a área macro aplica uma versão simplificada da ação de fechamento de faixa. A versão simplificada do fechamento de faixa basicamente altera a capacidade da seção; a nova capacidade é calculada levando em conta as faixas restantes abertas. Nesta versão, a ação é aplicada à faixa inteira e não leva em conta a distância de visibilidade, porque as faixas não são distinguíveis no nível macro. Além disso, a ação não pode ser aplicada a tipos específicos de veículo porque a alteração de capacidade afeta igualmente todos os tipos de veículo. ele altera os custos da rede, que se aplicam igualmente a todos os tipos de veículo.

Fechamento de movimento de conversão¶
Esta ação fecha um movimento de conversão. Quando a demanda é baseada em matrizes OD, o fechamento do movimento de conversão pode afetar todo o movimento de conversão ou apenas um subconjunto de suas faixas de origem. Quando a demanda é baseada em estados de tráfego, a ação de fechamento do movimento de conversão só pode ser usada quando o fechamento se aplica apenas a algumas faixas de origem específicas.
Ao fechar todo o movimento de conversão, as opções são:
- As seções de origem e destino do movimento de conversão.
- O centroide de origem e de destino (ou agrupamentos de centroides, se o fechamento de movimento de conversão afetar várias origens/destinos) dos veículos que serão afetados pelo fechamento de movimento de conversão.
- O Classe de veículo que considerará o movimento de conversão como fechado.
- O nível de conformidade do fechamento.
Se necessário, o fechamento do movimento de conversão pode ser restrito a faixas específicas. Isso será então aplicado a todos os veículos na simulação, sem filtragem por centroide OD ou classe de veículo. Para simulações híbridas macro–meso, esta opção é não disponível se a ação for aplicada dentro da área macro.

Em ambos os casos, também é especificada a distância de visibilidade do fechamento de faixa a ser usada no modelo de faixas-alvo válidas. O parâmetro Visibility Distance é usado para especificar o local onde os veículos mudarão seu caminho ou alterarão o conjunto de faixas válidas a ser usado.
Na captura de tela abaixo, o fechamento de movimento de conversão selecionado com uma Visibility Distance de 200 m pode ser aplicado em qualquer uma das seções destacadas em verde. À medida que o fechamento ocorre, um veículo dentro da distância de visibilidade atualizará seu caminho para evitar o movimento de conversão em fechamento. Para simulações híbridas macro–meso, dentro da área macro, a distância de visibilidade do fechamento de movimento de conversão pode ser encurtada ao cruzar uma fronteira macro–meso ou ao encontrar uma seção de entrada. Ambos os casos são notificados na janela Log.

Em uma simulação SRC, quando um veículo encontra um movimento de conversão fechado, ele calculará um novo caminho até seu destino; isso é verdadeiro para todos os veículos, independentemente do tipo de caminho que estejam usando. Se o Influenciar Custos de Caminho a opção é selecionada, então o fechamento é levado em conta quando os caminhos são recalculados. O movimento de conversão é, portanto, removido do cálculo da árvore de caminhos mínimos, e novos caminhos SRC calculados enquanto o fechamento estiver em vigor não o incluirão. Assim, os veículos que entrarem na rede após o fechamento e após o recálculo dos caminhos não poderão selecionar caminhos que incluam esse movimento de conversão.
Em uma simulação DUE, os veículos não mudam de caminho no meio da viagem e, portanto, não encontrarão um novo caminho até seu destino se encontrarem um movimento de conversão fechado. Portanto, qualquer Fechar movimento de conversão ações usadas em uma simulação DUE sem o Influenciar Custos de Caminho opção ativada são ignorados e os veículos continuarão usando seu caminho original. Se uma Fechar movimento de conversão a ação é usada com o Influenciar Custos de Caminho opção selecionada, então os caminhos serão recalculados e usados pelos veículos recém-gerados, mas aqueles que já estiverem na simulação continuarão em seus caminhos originais. Caminhos derivados de um DUE que inclui um Fechar movimento de conversão a ação deve, portanto, ser verificada para garantir que sejam compatíveis para uso em uma simulação one-shot subsequente com o mesmo Fechar movimento de conversão ação.
Ativação do Modelo de Cooperação em Movimentos de Conversão¶
Esta ação modifica as prioridades dos movimentos de conversão selecionados. O modelo de cooperação pode ser ativado com base em movimento de conversão e tipo de veículo. Quando aplicado, os veículos com prioridade no movimento de conversão cooperarão com o tipo de veículo selecionado, enquanto, em circunstâncias normais, esses veículos selecionados seriam obrigados a ceder a passagem. Esta ação é não disponível na área macro de uma simulação híbrida macro–meso.
A quantidade de cooperação depende da % cooperação da seção de destino do movimento de conversão prioritário. Isto é definido no Editor de Seções. Uma cooperação de 100% acionará um comportamento de zíper em situações congestionadas. Uma cooperação de 0% leva a um comportamento ditado por um modelo puro de ceder passagem.

Esta ação é aplicada apenas em simulações microscópicas.
Redução de velocidade¶
Esta ação altera a velocidade de uma seção, de todas as seções pertencentes a um tipo viário específico ou de um movimento de conversão. Agrupamentos também podem ser usados para aplicar a redução de velocidade a vários objetos. Ao alterar a velocidade de uma única seção, a faixa e o segmento afetados podem ser especificados. Ao alterar a velocidade de um agrupamento de seções ou de todas as seções pertencentes a um tipo viário específico, a nova velocidade afetará todas as faixas e segmentos nas seções. O tipo de objeto a ser alterado é selecionado em Tipo de Objeto lista suspensa. Se o tipo for Seção então a faixa e o intervalo dos segmentos da seção podem ser especificados.
A velocidade máxima de um veículo em uma seção ou movimento de conversão é calculada como o mínimo entre a velocidade máxima desejada do veículo e o limite de velocidade da seção/movimento de conversão multiplicado pela aceitação do limite de velocidade do veículo. A nova velocidade especificada pode substituir apenas o limite de velocidade da seção ou o limite de velocidade da seção multiplicado pela aceitação do limite de velocidade. Quando a ação de redução de velocidade tiver a intenção de ignorar a aceitação do limite de velocidade, escolha a segunda opção.
Se uma Vehicle Class for especificada, somente os veículos pertencentes a essa classe serão afetados pela redução de velocidade ao entrarem no segmento da seção que contém a alteração.
Na simulação mesoscópica, não é possível alterar a velocidade para um subconjunto de faixas. Essa ação só pode alterar a velocidade para todas as faixas. Alterar a velocidade para um segmento específico de uma seção é possível em uma simulação mesoscópica, levando em conta que o comprimento dos segmentos mesoscópicos internos pode ser diferente devido a detalhes de implementação do modelo.
Em uma simulação híbrida macro–meso, quando aplicado a uma seção macro ou a movimentos de conversão, ele também afeta a velocidade de todas as faixas. Também é aplicado a todos os tipos de veículos.

Movimento de conversão forçado¶
Esta ação força um movimento de conversão em um veículo dependendo de sua origem e/ou destino (se matrizes OD forem usadas) ou de seu movimento de conversão desejado (tanto para matrizes OD quanto para estados de tráfego).
Observação: esta ação é não ativado em simulações DUE.
O editor de Movimento de Conversão Forçado pode especificar se esta ação será usada em um cenário com demanda de tráfego composta por matrizes OD ou estados de tráfego. Para a área macro de simulações híbridas macro–meso, a ação só está disponível para cenários com matrizes OD.
Se estados de tráfego forem usados, apenas o de e para seções são necessárias para determinar o movimento de conversão desejado. Os veículos que planejam realizar esse movimento de conversão serão forçados a mudar. Se a opção de demanda de tráfego baseada em Matrizes OD for usada, a configuração de centroides e os centroides de origem e destino (ou agrupamentos de centroides, se o movimento de conversão forçado afetar várias origens/destinos) também podem ser especificados, bem como uma seção opcional no caminho a jusante. Isso força os veículos em uma viagem cujo caminho planejado incluirá posteriormente essa seção a realizar o movimento de conversão forçado.
A seção onde o movimento de conversão forçado começa pode ser selecionada com um clique esquerdo. A seção no caminho a jusante pode ser selecionada com CTRL + clique esquerdo. Alternativamente, essas seções podem ser selecionadas em uma lista suspensa. A distância de visibilidade especifica o ponto no qual os veículos mudarão seu caminho ou alterarão o conjunto de faixas válidas a serem usadas no movimento de conversão. Dessa forma, eles levam em conta o novo movimento de conversão forçado.
Para a área macro de simulações híbridas macro–meso, a distância de visibilidade é não consideradas porque as faixas não são distinguíveis no nível macro.
O movimento de conversão forçado pode ser para uma ou mais seções de destino e a proporção de veículos que seguem para cada seção de destino é especificada. O movimento de conversão original também pode ser incluído nesta lista, efetivamente desviando apenas uma proporção dos veículos. Todos os subcaminhos que contêm a seção de destino desse movimento de conversão forçado aparecerão no Subcaminhos janela. A porcentagem de veículos que fazem esse movimento de conversão e que então seguirão esse subcaminho pode ser especificada.
O filtro de classe de veículo especifica quais veículos serão afetados por esta ação. Você também pode fornecer o nível de conformidade desejado.


Forçar Atualização de Caminho em Rota ¶
Ao simular usando Matrizes OD, esta ação faz com que os veículos selecionem uma rota alternativa para chegar ao seu destino a partir da seção atual.
Os veículos candidatos para forçar a atualização da atribuição de caminho são selecionados pela viagem em que estão, especificada por uma configuração de centroides e pelo centroide de origem e de destino (ou agrupamentos de centroides se a atualização forçada de caminho em rota afetar várias origens/destinos). No exemplo aqui, veículos de qualquer origem que estejam nesta seção indo para o destino designado são candidatos à atualização da atribuição de caminho. Um subconjunto (aqui 75% de todas as classes) é selecionado no filtro de veículos.
Observe que esta ação é não ativado em simulações DUE.
A nova rota pode ser a rota mais curta ou uma rota selecionada por meio de um dos vários Modelos de Escolha Discreta (Binomial, C-Logit, Logit, Proportional). Selecionar uma dessas opções faz com que um conjunto de configurações de parâmetros específico do contexto seja solicitado no editor. Se a opção para Reavaliar quando o tempo de viagem for atualizado estiver selecionado, então os veículos na seção onde a ação ocorre, que já terão avaliado seu próximo movimento de conversão depois que a ação foi promulgada, reavaliarão sua escolha de rota quando ocorrer um recálculo normal de escolha de rota DTA. Assim, eles levarão em conta qualquer mudança em seu caminho ótimo e alterarão suas decisões de caminho de acordo.
A seção onde a atualização forçada do caminho começa é selecionada com um clique esquerdo; a seção no caminho a jusante é selecionada com um CTRL clique com o botão esquerdo. Alternativamente, elas podem ser selecionadas em uma lista suspensa de seções.

Mudança de Destino¶
Ao simular usando matrizes OD, esta ação altera o centroide de destino de um veículo.
Observe que esta ação é não ativado em simulações DUE.
A seção onde a ação ocorre e a configuração de centroides devem ser especificadas, juntamente com o centroide de origem e de destino (ou agrupamentos de centroides, se a mudança de destino afetar várias origens/destinos) afetados e os novos destinos para esses pares OD. O novo destino pode ser um novo centroide ou uma lista de centroides com diferentes probabilidades que devem totalizar 100%. O filtro especifica quais veículos na seção serão afetados por esta ação, pela classe de veículo considerada e pelo nível de conformidade.

Park and Ride¶
Quando uma simulação usa matrizes OD, esta ação altera o centroide de destino de determinados veículos, enviando-os para um centroide alternativo de park and ride onde sua viagem termina (a segunda parte da viagem até o destino final sendo uma viagem de transporte público).
No editor de Park and Ride, a configuração da seção e do centroide deve ser especificada, juntamente com o centroide de origem e destino (ou agrupamentos de centroides se a mudança de destino afetar várias origens/destinos) e um conjunto de novos destinos para esses pares OD. O filtro especifica qual seção e qual classe de veículo serão afetadas pela ação. Uma Percentage of Compliance também pode ser especificada.
Esta ação é não disponível para a área macro de uma simulação híbrida macro–meso.
A ação park and ride requer:
- Todos os centroides de destino e park and ride devem estar conectados a um conjunto de paradas de transporte público.
- Um centroide de destino alternativo (o local de park and ride) é candidato somente se estiver conectado por linhas de transporte público ao centroide de destino final. - TODODOC revisar - sem transbordos ou tanto faz?
- O Cenário deve ter um Plano de Transporte Público e estatísticas para transporte público (Scenario/Outputs to Generate) deve estar ativo para calcular o tempo esperado de chegada de cada veículo de transporte público em cada parada.

A ação avalia:
- Expected Cost: O custo total do caminho do veículo para alcançar seu destino e atribuído como a desutilidade do destino final.
- Custo Esperado usando Transporte Público: Para cada centroide alternativo de park and ride, este é o tempo mínimo de viagem para usar transporte público e chegar ao destino final. - TODODOC revisar - Um veículo de transporte público é considerado se o tempo de viagem para alcançar o destino alternativo for maior que o custo do caminho para chegar a esse novo destino.
Então, se o centroide alternativo tiver um função de custo de park and ride, a desutilidade desta alternativa é encontrada avaliando a função. Caso contrário, a desutilidade é simplesmente o custo esperado usando transporte público.
Por fim, uma função Logit é aplicada com um Fator de Escala para determinar a porcentagem de veículos desviados para cada um dos locais de park and ride e para o destino final sem usar um park and ride.
Observe que esta ação é não ativado em simulações DUE.

Incidente na seção¶
Esta ação bloqueia uma área escolhida nas faixas selecionadas, produzindo assim um incidente em uma seção (isto representa, por exemplo, um veículo parado bloqueando parte de uma seção). Os parâmetros para esta ação são:
- A seção onde o incidente ocorrerá.
- A distância de visibilidade do incidente a ser usada no modelo de faixas de destino válidas.
- Se uma redução de velocidade deve ser aplicada ao incidente para desacelerar os veículos ao passarem por ele. Se a redução for aplicada, são especificadas a distância a montante e a jusante do incidente, bem como a velocidade reduzida-alvo. Os valores padrão são 200m de cada lado e 50 km/h.
Nota: A redução de velocidade não se aplica a modelos mesoscópicos nem a modelos híbridos macro–meso. Na área macro, a distância de visibilidade é não aplicado porque não há faixas.
Os parâmetros restantes mostrados no editor, a localização e o tamanho do incidente, são editados na visualização 2D movendo o objeto de incidente para seu local na seção e usando as alças no retângulo do incidente para variar seu comprimento e uso de faixas. No editor, esses valores são exibidos, mas não são editáveis.

Incidente Periódico em Seção¶
Esta ação cria incidentes aleatórios dentro de uma área especificada de acordo com a combinação de um intervalo e uma duração. Durante o intervalo de tempo especificado, ela criará incidentes em uma ou várias faixas seguindo os padrões temporais definidos na caixa de diálogo Periodic Section Incident.
Por exemplo, essa ação pode gerar um incidente que ocorre a cada 3 minutos e bloqueia o tráfego por 1 minuto na faixa 2 ao longo de um comprimento especificado de uma seção escolhida. Um dos muitos usos desse tipo de incidente é modelar os efeitos de alterações no estacionamento em via pública. A configuração de incidentes periódicos é abordada no Exercício 6 do tutorial Managing Traffic.
Os dados a serem definidos no Periodic Section Incident são separados em dois grupos: Where e What. Os parâmetros em Where especificam a área retangular dentro da qual ocorrerão incidentes periódicos. Os parâmetros em What especificam que tipo de incidentes ocorrerá.

Onde-Tentando uma nova estrutura aqui
- Seção: Selecione uma seção na qual ocorrerão incidentes periódicos.
- Da faixa e Para a faixa: Selecione o intervalo de faixas nas quais ocorrerão incidentes.
- Da posição: Inserir o ponto inicial da área dentro da qual os incidentes ocorrerão.
- Comprimento: Insira o comprimento da área (você também pode arrastar e posicionar essa área manualmente na vista 2D).
- Distância de Visibilidade: Insira a distância de visibilidade de cada incidente a ser considerada no modelo de faixas-alvo válidas.
O que
- Comprimento do Incidente e Desvio: Especifique a duração dos incidentes periódicos. É necessário adicionar um valor de desvio a essa duração.
- Faixas a Cobrir: Selecione o número de faixas a serem afetadas por incidentes.
- Inicia a Cada e Desvio: Insira um intervalo para a criação de cada incidente (um a cada 3 minutos, ou 5 minutos etc.). Adicione um valor de desvio, se necessário.
- Duração: Insira a duração de cada incidente. Adicione um valor de desvio se necessário.
Diferenças entre Simulações Micro e Meso/Híbridas¶
Em simulações microscópicas, os incidentes são posicionados aleatoriamente dentro da área especificada. O tamanho, a frequência e a duração dos incidentes são implementados de acordo com os parâmetros definidos na caixa de diálogo Periodic Section Incident.
Em simulações mesoscópicas e híbridas macro–meso, a frequência e a duração dos incidentes são implementadas, mas o tamanho dos incidentes é ignorado e, em vez disso, os incidentes cobrem toda a área do incidente, que é considerada como um bloco homogêneo. Todas as faixas na área serão bloqueadas quando incidentes forem gerados. Nesses casos, os seguintes parâmetros são ignorados: Incident Length, Lanes to Cover, e seus Deviations. Veja também Incidentes de Tráfego Mesoscópicos.
Desativação de Faixa Reservada¶
Esta ação remove as restrições de uma faixa reservada previamente definida, tornando-a acessível a todos os veículos. Esta ação é não disponível na área macro de uma simulação híbrida macro–meso. Os parâmetros a definir são:
- A seção em que a faixa reservada deve ser desativada.
- Qual(is) faixa(s) reservada(s) específica(s) na seção será(ão) desativada(s).
- O intervalo de segmentos a desativar.

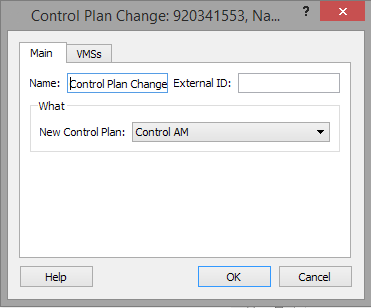
Alteração do Plano de Controle¶
Esta ação altera o plano de controle padrão definido no cenário para aquele definido no editor de ações.
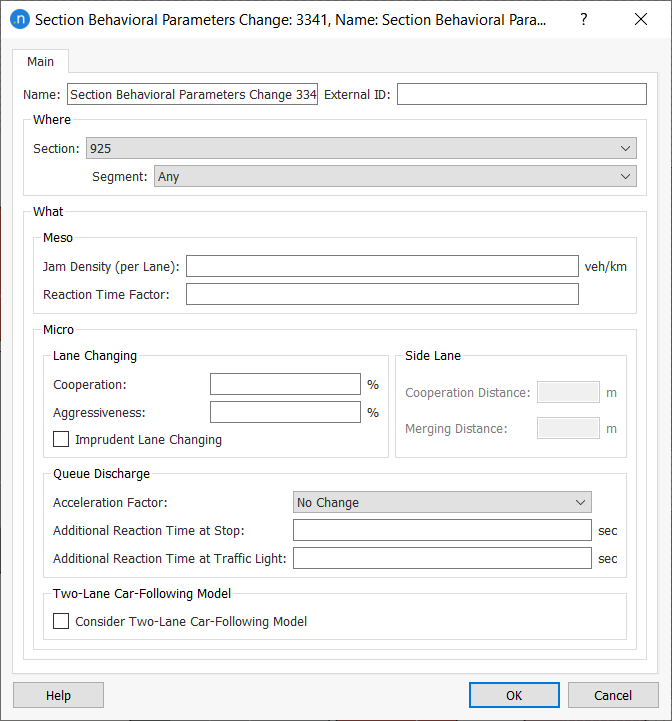
Alteração de Parâmetros Comportamentais da Seção¶
Esta ação altera vários parâmetros microscópicos e mesoscópicos do seção:
- Mesoscópico:
- Fator de Tempo de Reação em uma seção específica - substitui os valores padrão.
- Microscópico:
- Distância de visibilidade das faixas reservadas.
- Parâmetros de mudança de faixa.
- Parâmetros de Side Lane Changing. Esta ação só estará disponível em seções com uma faixa lateral.
- Parâmetros de descarga de fila.
- Ativação do Modelo de Car-Following de Duas Faixas.
Esta ação é não disponível na área macro de uma simulação híbrida macro–meso.
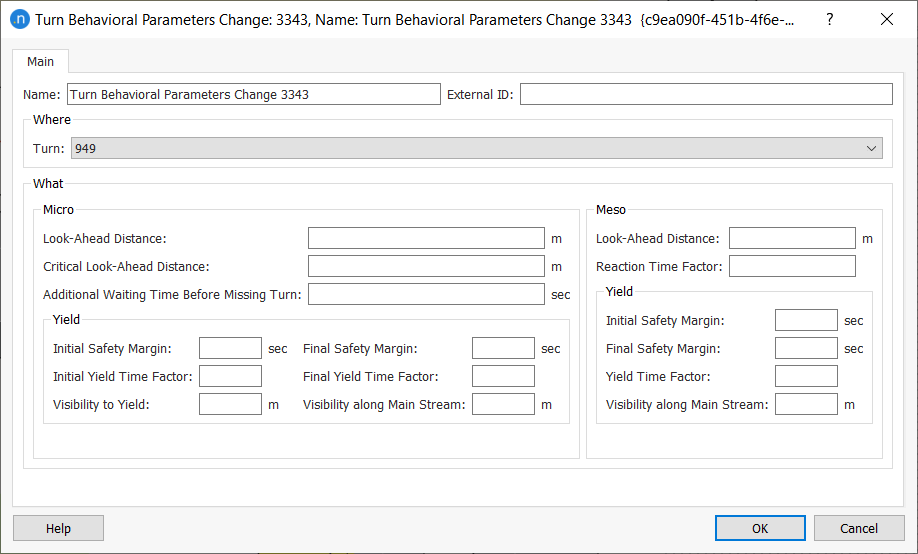
Alteração de Parâmetros Comportamentais de Movimentos de Conversão¶
Esta ação altera vários parâmetros microscópicos e mesoscópicos do movimento de conversão:
- Microscópico:
- Distâncias de Antecipação. Essas alterações só estão disponíveis quando o movimento de conversão começa em um subconjunto de faixas da seção de origem.
- parâmetro Additional Waiting Time Before Missing Turn.
- Parâmetros de preferência. Essas alterações estão disponíveis somente quando o movimento de conversão tem uma placa de Dê a preferência ou Pare.
- Mesoscópico:
- Distância de Antecipação. Esta alteração só está disponível quando o movimento de conversão começa a partir de um subconjunto de faixas da seção de origem.
- Fator de Tempo de Reação ao Movimento de Conversão.
- Parâmetros de preferência. Essas alterações estão disponíveis somente quando o movimento de conversão tem uma placa de Dê a preferência ou Pare.
Esta ação é não disponível na área macro de uma simulação híbrida macro–meso.
Alteração de Rota de Transporte Público¶
Esta ação permite redirecionar linhas de transporte público como parte de uma estratégia para mitigar ou evitar congestionamentos ou outros problemas na rede. Você pode especificar e editar os desvios desejados. Atualmente, esta ação está disponível apenas em simulações micro e meso; simulações híbridas macro–meso e híbridas meso-micro estão excluídas.
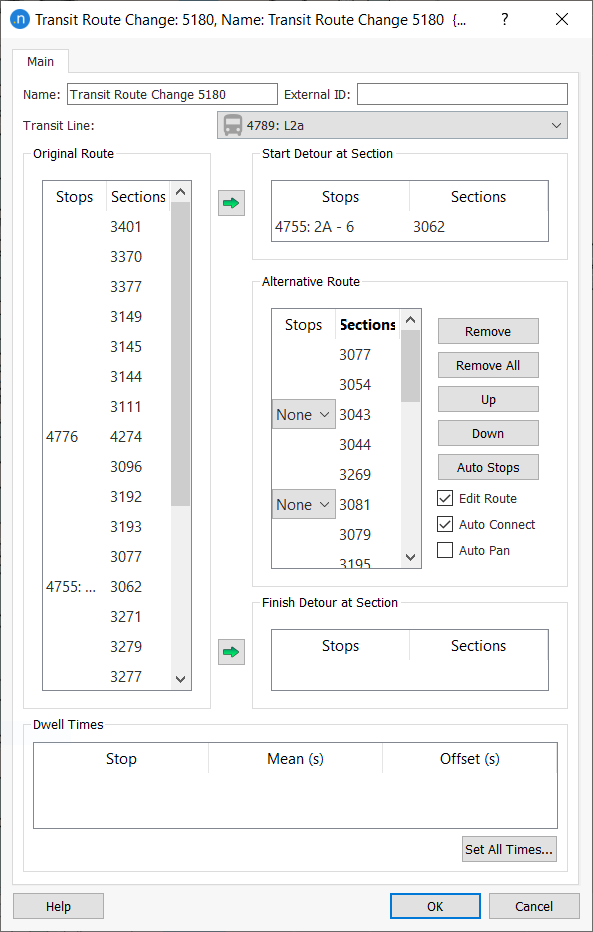
Os parâmetros a definir são:
- Linha de Transporte Público: Selecione a linha afetada.
- Iniciar Desvio na Seção: Selecione uma seção ou parada de transporte coletivo na lista Rota Original e clique na seta verde para especificar onde o desvio começa.
- Finalizar Desvio na Seção: Selecione uma seção ou parada de transporte público na lista Rota Original e clique na seta verde para especificar onde o desvio termina.
- Rota alternativa
- Clique nas seções viáveis na visualização 2D para especificar a rota do desvio. Elas são adicionadas à caixa Alternative Route.
- Organize os elementos do desvio clicando em Remove, Remove All, Up, Down ou Auto Stops, conforme necessário. Auto Stops adiciona todas as paradas de transporte coletivo viáveis à nova rota.
- Editar Rota: Marque para tornar o desvio editável.
- Auto Connect: Marque para conectar automaticamente seções viáveis usando o caminho físico mais curto entre elas.
- Auto Pan: Marque para deslocar a visualização 2D para a rota do desvio.
- Tempos de Permanência: Insira valores de Média e Offset para todas as paradas de transporte coletivo no desvio.
-
Definir Todos os Tempos: Clique neste botão para abrir o Editor de Tempos de Parada, no qual você pode definir os mesmos valores de Média e Desvio para todas as paradas de transporte viáveis no desvio.
Quando você clicar em OK para fechar a caixa de diálogo, será notificado sobre quaisquer erros no desvio e poderá continuar editando a rota.
Alteração de Rota de Transporte Coletivo e Configurações de Geometria¶
Se o seu projeto usa configurações de geometria que interrompem ou quebram linhas de transporte público na rede base (ou 'de controle'), você pode usar alterações de rotas de transporte público para reparar as linhas.
Dessa forma, você pode executar experimentos com configurações alternativas de geometria em que os desvios são usados pelo software para reconectar interrupções às linhas de transporte coletivo. Consulte Usando ações de alteração de rota de transporte coletivo com configurações de geometria para obter mais informações.
Chamada Periódica¶
Esta ação cria chamadas aleatórias em um detector. Durante o intervalo de tempo especificado, ela emulará chamadas seguindo os padrões de tempo definidos na caixa de diálogo Periodic Call.
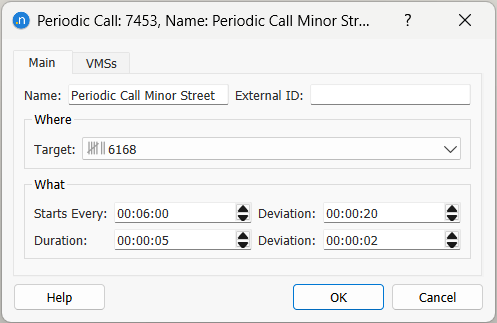
Observe que, para emular chamadas devido a um Botão de Pedestre, esta ação também pode ser usada, mas exigirá a definição de uma seção dummy + detector dummy (e sua inclusão no plano de controle correspondente).
Gatilhos¶
Um gatilho é uma expressão que é avaliada como true ou false. A expressão é uma coleção de condições baseada no estado atual de uma seleção de elementos da rede (seções e detectores).
Os gatilhos são criados a partir do Projeto / Novo / Acionador menu. A expressão a ser avaliada é definida em seu editor. A próxima figura mostra um exemplo:

O gatilho pode usar valores de atributos de detectores e seções. Entre os atributos que podem ser usados de detectores estão:
- Contagem
- Densidade
- Intervalo
- Ocupação
- Velocidade
- Presença
Os atributos das seções incluem:
- Densidade
- Tempo de atraso
- Fluxo
- Comprimento Máximo da Fila
- Comprimento Médio da Fila
- Velocidade
- Paradas (Número de paradas)
- Tempo de viagem
- Fila Virtual SI (Disponível somente usando a simulação microscópica )
- Densidade SI (Disponível apenas usando a simulação microscópica)
Esses atributos são avaliados toda vez que estatísticas são coletadas (para seções) ou no intervalo de detecção (para detectores, quando os dados são agregados) durante uma simulação. Somente atributos que começam com SI (Simulation Instantaneous) estão disponíveis em cada passo de simulação. O intervalo de avaliação é definido no Avaliar a cada caixa.
Embora os atributos SI estejam disponíveis, recomenda-se que os gatilhos sejam baseados em Última Série Temporal Gerada valores como no mundo real, estes são os dados disponíveis para sistemas de controle de tráfego. Da mesma forma, medidas como o número de paradas não são diretamente mensuráveis na via física e são, na prática, uma proxy para uma medida mais abstrata de congestionamento. Portanto, recomenda-se que os gatilhos sejam condições de detector, baseadas em Último gerado valores, e são avaliadas a cada intervalo de detecção. Deve-se considerar tanto como a medida poderia ser implementada na realidade para simular um sistema de controle prático quanto como a medida reflete as respostas dos motoristas à sua própria percepção das condições de tráfego.
Para criar uma nova condição, selecione Nova Condição e clique em uma seção ou em um detector na Janela 2D principal. Selecione o atributo, a operação (Equal, Not equal, Greater than, Less than ...), um valor e uma operação de ligação para a próxima condição. A ordenação das condições pode ser alterada movendo-as para cima ou para baixo na lista.
Os gatilhos não são avaliados durante uma simulação DUE. O uso de gatilhos para ativar e desativar ações é não disponível em simulações híbridas macro–meso para ações aplicadas dentro da área macro.
Avaliação de Gatilho¶
As diferentes condições em um trigger são sempre avaliadas de cima para baixo; portanto, por exemplo, a avaliação de:
- A or B and C seria: (A or B) and C
- A e B ou C seria : (A e B) ou C
- A ou B e C ou D seria ((A ou B) e C) ou D.
Condições complexas como (A or B) and (C or D) não são suportadas atualmente.
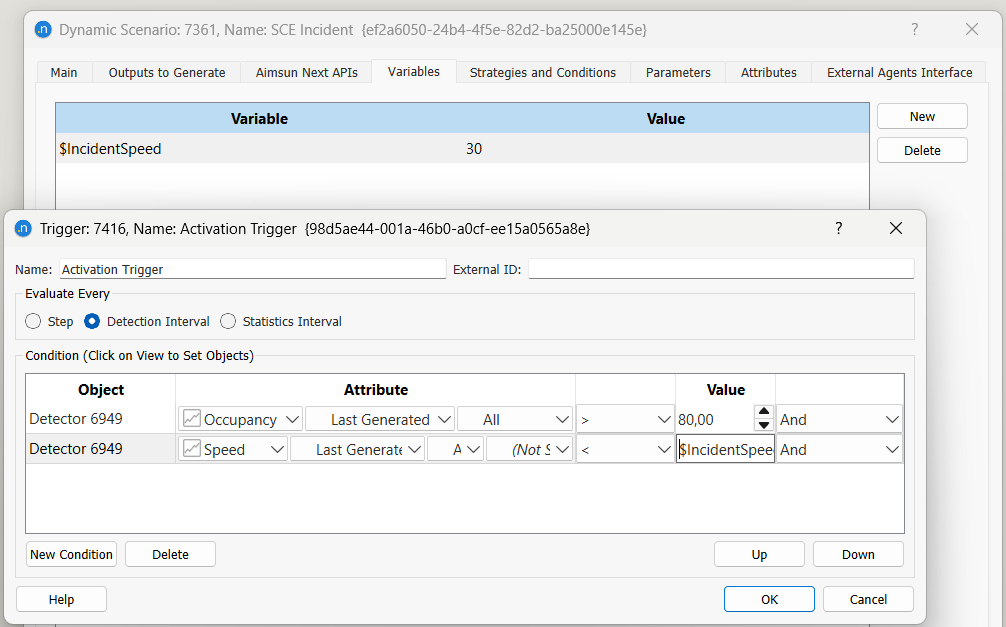
Variáveis¶
Em vez de usar valores numéricos a serem comparados com o valor dos atributos, variáveis podem ser usadas para fornecer esses valores. Esses valores serão definidos no nível do cenário ou do experimento; veja, por exemplo, o Editor de experimento. Isso permitiria que uma política fosse acionada quando a velocidade de uma seção estivesse abaixo de 20 Km/h em um experimento e abaixo de 10 Km/h em outro, usando as mesmas políticas e acionadores em ambos os experimentos.
Se variáveis forem definidas em um cenário ou experimento, o campo de valor não estará mais limitado a valores numéricos e nomes de variáveis poderão ser inseridos.