Tipos de Veículo¶
Um tipo de veículo é uma classificação de veículos e motoristas com características físicas e comportamentais comuns. Por exemplo, podem ser definidos tipos como carro, táxi, ônibus público, ônibus privado, LRT (Light Rail Transit), SUV (Sport Utility Vehicle), caminhão e caminhão longo.
Use o Projeto menu ou o Dados de Demanda menu de contexto para criar um novo Vehicle Type. Eles também podem ser criados a partir do menu de contexto da sua própria pasta.
Classificação de Tipos de Veículos¶
Tipos de veículos podem ser agrupados em Classes de Veículos.
Classes de Veículos são usadas em faixa reservada definições. Por exemplo, classes Public, Private, Emergency e HOV (high occupancy vehicle), que correspondem às definições de faixas reservadas no modelo de rede. O uso de Classes é opcional e só é necessário quando há restrições de faixa.
Eles também podem ser usados em grupo semafórico definições, para definir diferentes semáforos seguidos por diferentes classes de veículos e, em alguns dos ações de gerenciamento de tráfego, para especificar as classes de veículos afetadas por eles.
Tipos de Veículo refere-se aos diferentes tipos de veículos para os quais os dados de demanda de tráfego são definidos. Isso inclui fluxos de entrada e proporções de movimentos de conversão, bem como o número de viagens nas matrizes OD, que podem ser especificados para cada tipo de veículo. O uso de tipos de veículo em um modelo é necessário para definir os dados de demanda de tráfego. Tipos de veículo também são usados para definir as características físicas do veículo, como largura, comprimento, velocidade, aceleração, desaceleração e sua aparência.
Uma Classe pode ser composta por um ou mais Tipos, e um Tipo pode pertencer a nenhuma, uma ou várias Classes. Por exemplo:
- Classe Pública: ônibus, táxi, ambulância, viatura policial
- Classe Privada: carro, HGV, caminhão, van, carro HOV
- Classe de emergência: ambulância, viatura policial
- Classe HOV: carro HOV
- Classe de carro:carro, carro de polícia, carro HOV
- Classe Comercial: HGV, caminhão, van
Uma faixa reservada pode ser definida para uma determinada classe. Por exemplo, uma faixa reservada pode ser definida para a classe pública. Essa faixa estaria disponível apenas para ônibus, táxis, ambulâncias e viaturas policiais, usando o exemplo acima.
Editor de Tipo de Veículo¶
O editor de tipo de veículo é usado para especificar as características físicas e os parâmetros de um tipo de veículo. Definir valores apropriados para esses parâmetros faz parte do modelo calibração processo.
Quase todos os parâmetros são definidos usando uma distribuição normal truncada.
Aba Principal¶
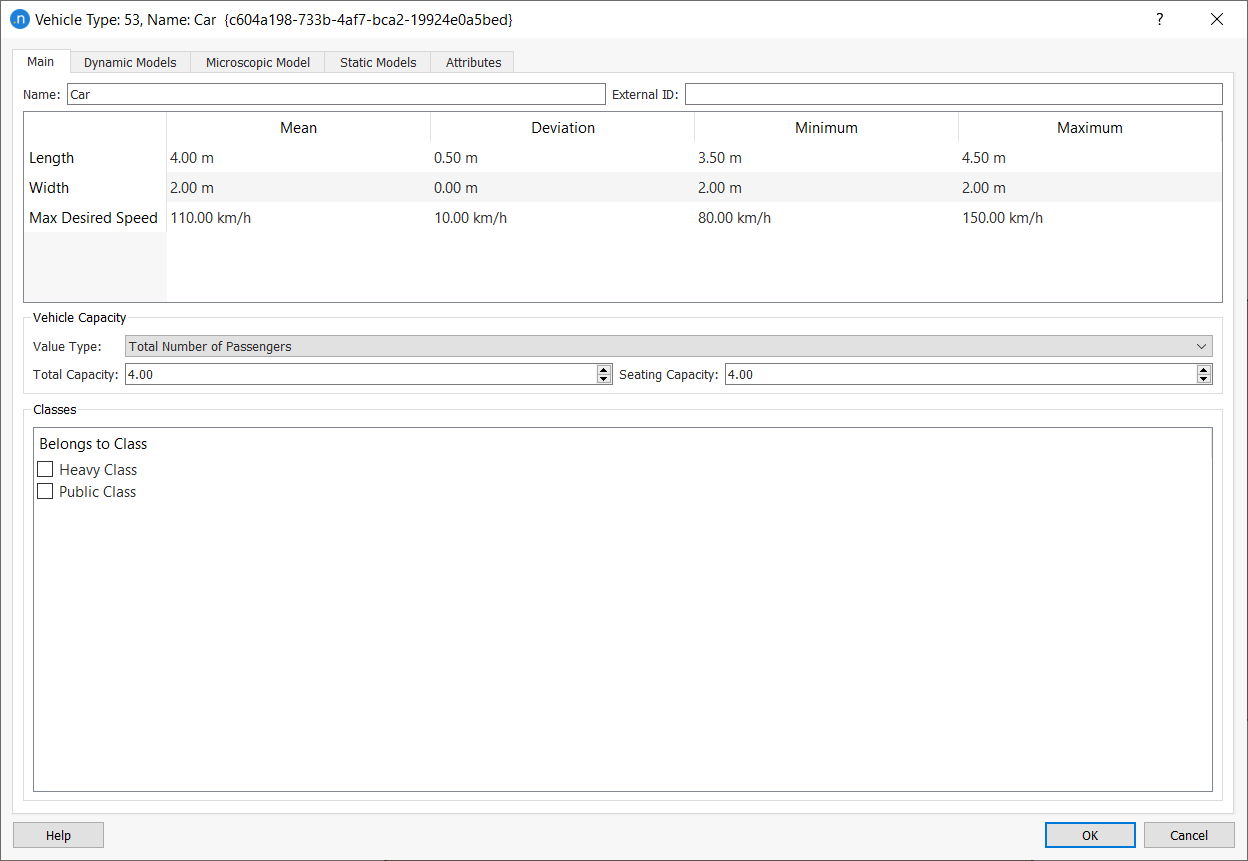
No Principal aba, são definidos o Name e o External ID do tipo de veículo. Também são definidos os parâmetros físicos do tipo de veículo, como Length, Width e Maximum Desired Speed.
Comprimento¶
O comprimento, em metros, para este tipo de veículo. Este parâmetro é usado tanto para fins gráficos quanto de modelagem. Ele tem influência direta na modelagem de tráfego, pois o comprimento do veículo é levado em conta nos modelos microscópicos e mesoscópicos de comportamento veicular.
Largura¶
Esta é a largura, em metros, para este tipo de veículo. Este parâmetro é usado apenas para fins gráficos e não tem influência direta na modelagem de tráfego.
Velocidade desejada máxima¶
Esta é a velocidade máxima, em km/h, para este tipo de veículo quando não estiver restrita de outra forma pelos limites de velocidade da seção. Por exemplo, poderia ser definido um tipo de veículo ‘car’ com uma velocidade desejada máxima de 110 km/h, um desvio de 10 km/h, um valor máximo de 140 km/h e um valor mínimo de 90 km/h. As velocidades dos automóveis seriam amostradas a partir de uma distribuição Normal (110,10) em uma simulação microscópica ou mesoscópica. Um tipo 'sports car' também poderia ser definido com um potencial de velocidade muito maior
Capacidade Máxima¶
Isto indica o número máximo de passageiros que podem viajar em um veículo deste tipo de veículo. Este valor pode ser definido tanto como um fator multiplicador do comprimento do veículo quanto como um valor total. Este parâmetro é usado pelo simulador de pedestres ao carregar pedestres em veículos de transporte público e também na Alocação de Transporte Público. Consulte o Simulador de Pedestres manual ou Modelagem da Demanda de Viagens para obter mais informações.
Classes de Veículos¶
O tipo de veículo pode ser associado a qualquer uma das classes de veículos existentes selecionando a classe desejada na pasta Classes. Consulte o Edição de Classe de Veículo seção para obter detalhes sobre a criação de classes de veículos.
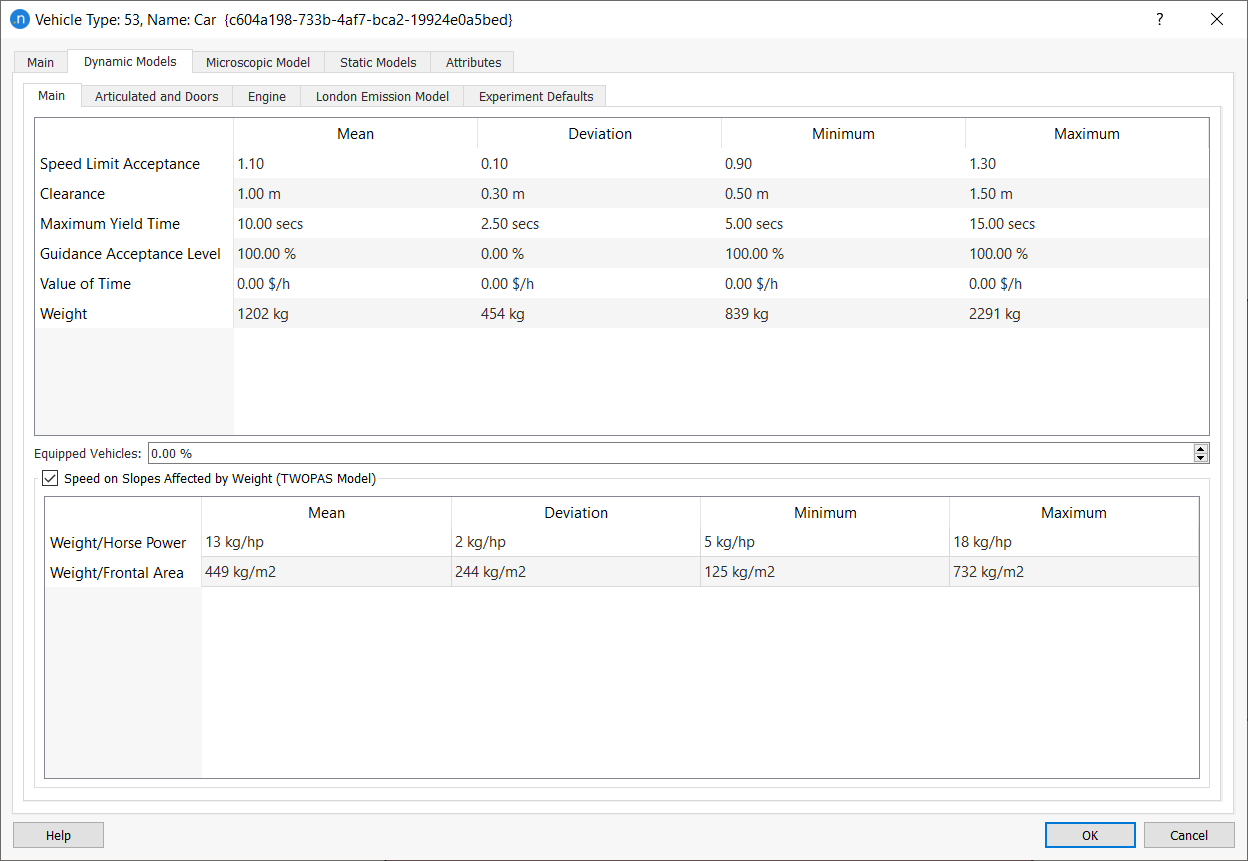
Aba Modelos Dinâmicos¶
Esta aba contém os parâmetros que são usados pelos simuladores microscópico e mesoscópico. Quase todos os parâmetros são definidos usando uma distribuição normal truncada.
Aceitação do Limite de Velocidade¶
Este parâmetro pode ser interpretado como o ‘nível de bondade’ dos motoristas ou o grau de aceitação dos limites de velocidade. Quando é maior que 1, significa que o veículo tomará como velocidade máxima para uma seção um valor maior que o limite de velocidade, enquanto quando é menor que 1 significa que o veículo usará um limite de velocidade menor. Veja a próxima seção para detalhes sobre como a velocidade máxima desejada de um veículo é calculada para diferentes partes da rede.
Liberação¶
Esta é a distância, em metros, que um veículo mantém entre si e o veículo precedente quando parado.
Tempo Máximo de Cedência¶
Quando um veículo está em uma situação de preferência, por exemplo em uma placa Yield ou Stop em um cruzamento ou em uma rampa de entrada em uma rodovia, ele aplica o modelo normal de aceitação de brechas ou um modelo de mudança de faixa para cruzar ou se inserir no tráfego, respectivamente. Quando um veículo permaneceu parado por mais do que este Tempo de cedência (em segundos), ele se tornará mais agressivo e reduzirá as margens de aceitação. Esse período também é usado no modelo de Mudança de Faixa como o tempo durante o qual um veículo aceita ficar parado enquanto espera que seja criada uma brecha na faixa desejada para o movimento de conversão antes de desistir e seguir em frente.
Nível de aceitação de orientação¶
Este parâmetro, entre 0 e 1, fornece o nível de adesão deste tipo de veículo às indicações de orientação, como informações fornecidas por Painéis de Mensagens Variáveis ou por Sistemas de Orientação Veicular específicos. Este parâmetro representa a probabilidade de que um veículo siga uma recomendação. Na versão atual do Aimsun Next, ele é considerado apenas para ações de gerenciamento de tráfego. Esclarecimento: Em versões anteriores, este parâmetro era usado para determinar o número de veículos orientados para a Dynamic Traffic Assignment. Na versão atual, o número de veículos orientados é determinado pelo percentuais de Atualização de Caminho em Rota definidos no experimento.
Valor do Tempo¶
Este parâmetro é usado apenas em funções de escolha de rota definidas pelo usuário para definir um valor do tempo. Ele fornece a conversão de custo monetário para tempo, portanto as unidades podem ser $/h, €/sec, etc.
Por exemplo, para adicionar o custo de pedágios a uma função de custo em que o custo se baseia no comprimento da seção, uma tollPrice, e o valor do tempo do veículo, o código a seguir seria usado:
def cost(context, manager, section, turning, travelTime):
sectionSpeed = min(
section.getSpeed()*manager.getNetwork().getVehicleById(context.getVehicle().getId()).getSpeedAcceptanceMean(),
manager.getNetwork().getVehicleById(context.getVehicle().getId()).getMaxSpeedMean())
turnSpeed = min(
turning.getSpeed()*manager.getNetwork().getVehicleById(context.getVehicle().getId()).getSpeedAcceptanceMean(),
manager.getNetwork().getVehicleById(context.getVehicle().getId()).getMaxSpeedMean())
attractivityFactor = 1+manager.getAttractivenessWeight()*(1-turning.getAttractiveness()/manager.getMaxTurnAttractiveness())
res = (section.length3D()/sectionSpeed+ turning.length3D()/turnSpeed)*attractivityFactor
res = res + manager.getUserDefinedCostWeight()*section.getUserDefinedCost()
tollPrice = 10 #units in monetary cost per meter taking also into account time units of VoT
vehicle = context.getVehicle()
res = res + (section.length3D()+turning.length3D())*tollPrice/vehicle.getValueOfTimeMean()
return res
Peso¶
Este parâmetro define o peso do veículo, que é usado no modelo de emissões LEM.
veículos equipados¶
Esta é a porcentagem de veículos que são 'Equipped'. Veículos equipados podem ser detectados por detectores com capacidade de medição ‘Equipped’, que fornecem o tempo de detecção, o identificador do detector, o identificador do veículo, o nome do tipo de veículo e o identificador da linha de transporte coletivo se for um veículo de transporte coletivo.
Velocidade em Rampas Afetada pelo Peso (Modelo TWOPAS)¶
Os parâmetros Weight/Horse Power e Weight/Frontal Area são necessários quando o modelo de rampa TWOPAS é ativado na simulação dinâmica.
No entanto, se o outro modelo de aceleração do microssimulador do Aimsun Next – o MFC – tiver sido ativado, esta caixa de grupo ficará desativada. Isso ocorre porque nossos modelos de aceleração são exclusivos. Você pode ativar ou desativar o modelo de aceleração MFC na caixa de diálogo Vehicle Type > Microscopic Model > subaba Car Following, marcando ou desmarcando Aplicar modelo MFC.
Em simulações mesoscópicas, a fórmula que fornece a velocidade de arrasto em aclive é usada para limitar a velocidade máxima do veículo. A fórmula para declives fornece uma velocidade máxima, portanto pode ser aplicada diretamente em simulações mesoscópicas.
Articulado e Portas¶
Você pode encontrar a subaba Articulated and Doors na aba Dynamic Models da caixa de diálogo Vehicle Type.
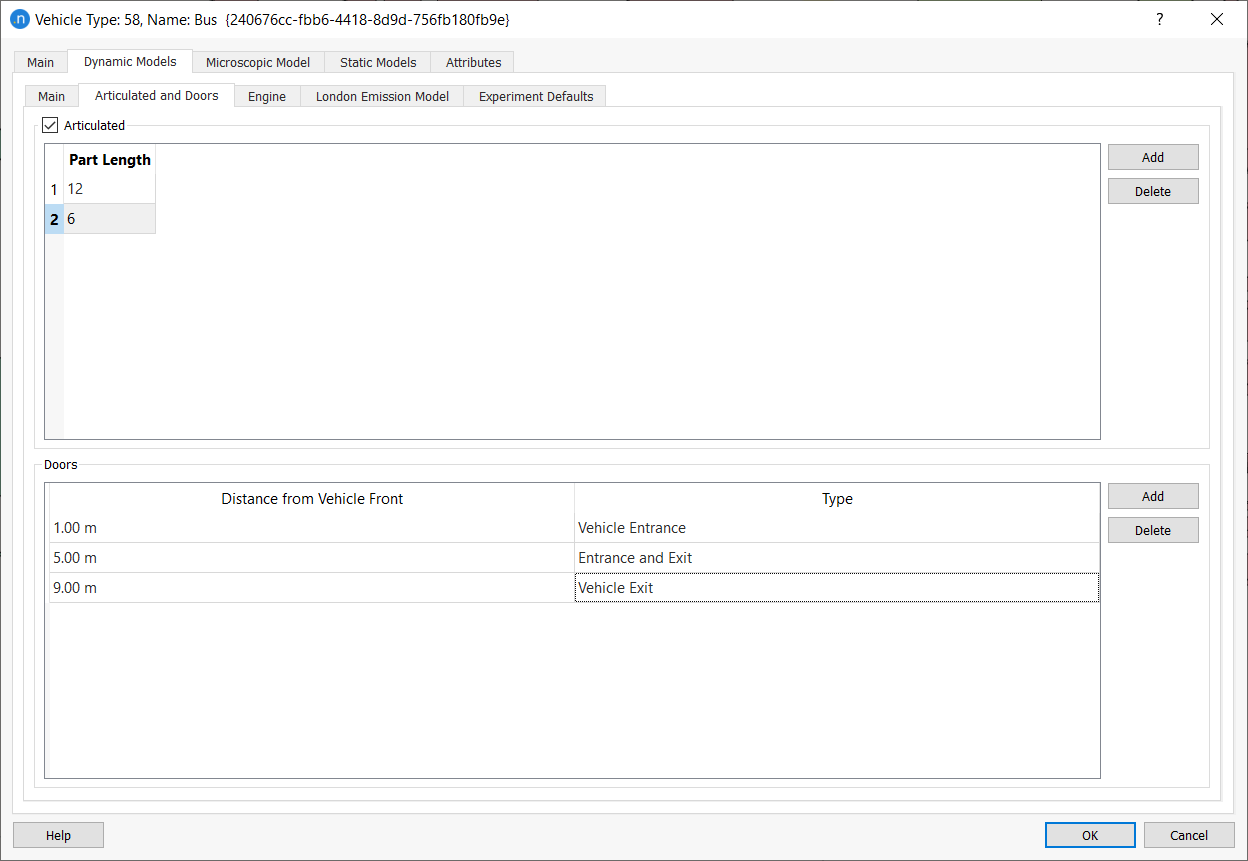
Veículos Articulados¶
Para definir como um veículo articulado:
- Marque o Articulado caixa.
- Clique Adicionar para adicionar seções articuladas ao veículo e inserir valores para cada Comprimento da Parte.
- Se precisar remover seções articuladas, selecione uma seção e clique em Excluir.
Portas¶
Para definir as portas do veículo:
- Clique Adicionar e selecione um Digite na lista suspensa.
- Insira um valor para Distância a partir da Frente do Veículo para a porta.
- Repita a etapa 2 para portas adicionais, se necessário.
- Clique OK para salvar suas alterações.
Estas informações serão usadas apenas por veículos de transporte coletivo ao simular pedestres. Para mais informações sobre como as portas são simuladas em micro e mesossimulações, consulte Atributos do Veículo e Comportamento de Paradas de Transporte Público.
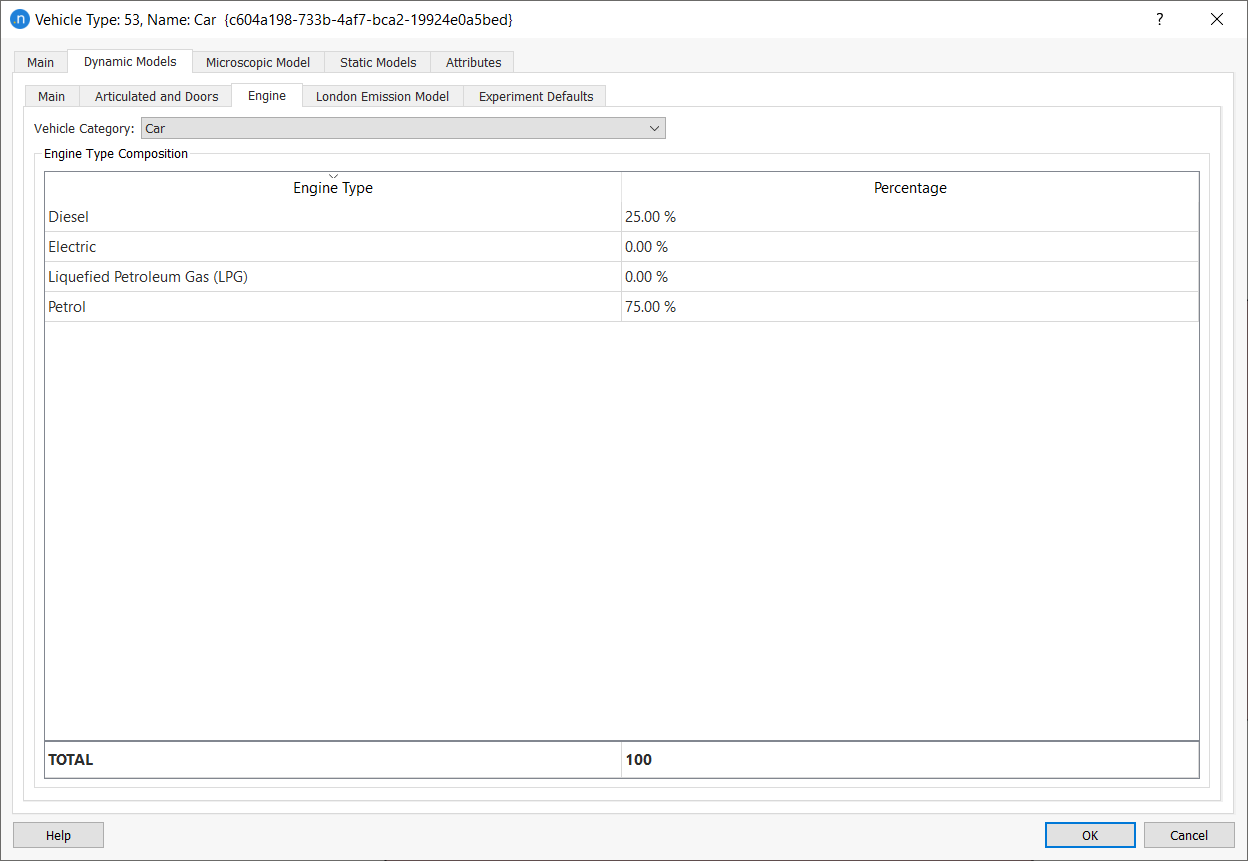
Motor¶
O Motor aba contém os parâmetros de Configuração de Categoria de Veículo e Tipo de Motor. Eles são usados pelos simuladores microscópico e mesoscópico.
Vehicle Category descreve o tipo específico de veículo: automóvel, veículo comercial, ônibus, motocicleta ou não motorizado. Engine Type Composition permite definir os percentuais de tipos de motor (Diesel, Electric, Liquefied Petroleum Gas e Petrol) na configuração da frota para o tipo de veículo.
Ambos os parâmetros permitem definir diferentes perfis de veículos no modelo de aceleração MFC, nos Modelos de Consumo de Energia (Combustível e Bateria) e nos modelos de emissões (QUARTET, Panis et al. e LEM).
O Padrões do Experimento a aba permite editar parâmetros que posteriormente podem ser alterados no nível do experimento. Estes parâmetros aqui são, na prática, um modelo, permitindo que o usuário altere no experimento apenas aqueles necessários para a calibração. Ela inclui os tempos de reação do motorista e parâmetros relacionados à atribuição dinâmica de tráfego.
Há três tempos de reação diferentes na simulação microscópica:
-
Tempo de reação: Este é o tempo que um motorista leva para reagir a mudanças de velocidade no veículo à frente.
-
Tempo de reação na parada: Este é o tempo que um veículo parado leva para reagir à aceleração do veículo à frente.
-
Tempo de reação no semáforo: Este é o tempo que o primeiro veículo parado após um semáforo leva para reagir à mudança do semáforo para verde.
Na simulação mesoscópica, apenas o tempo de reação e o tempo de reação em semáforos são usados.
Diferentes tempos de reação podem ser definidos associando uma probabilidade entre 0 - 1.0 a cada um deles . Todas as probabilidades dos tempos de reação devem totalizar 1.00
O papel dos parâmetros tempo de reação, tempo de reação na parada e tempo de reação no semáforo está documentado no Seção de parâmetros na seção teórica Vehicle-based Simulators do manual.
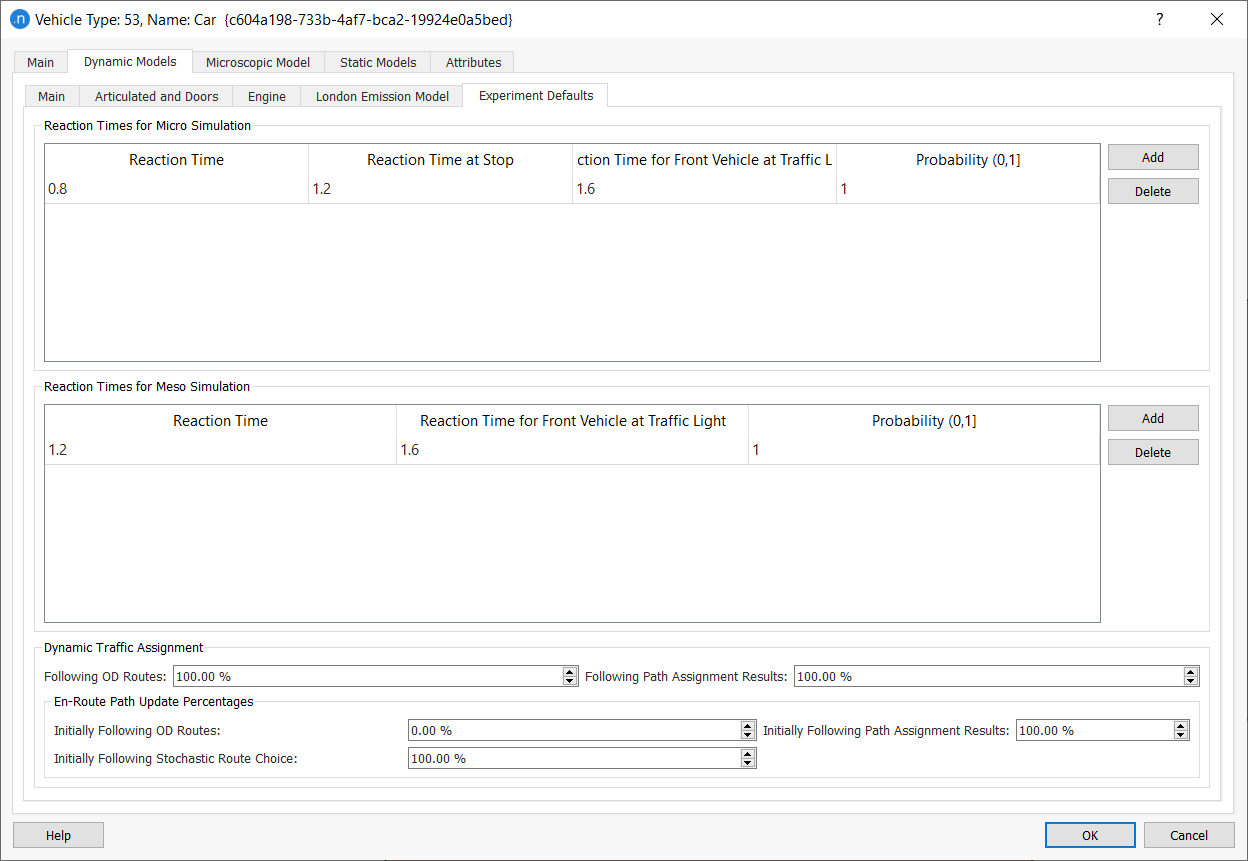
Os parâmetros padrão de atribuição dinâmica de tráfego que podem ser definidos são:
-
Rotas OD Seguintes: Define a porcentagem de veículos pertencentes a este tipo de veículo que tentarão seguir uma Rota OD (rota definida pelo usuário) ao entrar na rede.
-
Resultados da Atribuição de Caminho Seguinte: Define a porcentagem de veículos pertencentes a este tipo de veículo que tentará seguir uma rota do arquivo de resultados de Path Assignment, ao entrar na rede.
-
Atualização de Caminho para Veículos Usando Rotas OD: Define a porcentagem deste tipo de veículo que segue uma Rota OD (rota definida pelo usuário) e pode ter seu caminho reatribuído. Consulte a seção sobre Stochastic Route Choice, Atualização da Atribuição de Caminho em Rota.
-
Atualização de Caminho para Veículos Usando Resultados de Atribuição de Caminhos: Define a porcentagem de veículos pertencentes a este tipo de veículo que seguem uma rota a partir do arquivo de resultados de Path Assignment fornecido como entrada que podem ter seu caminho reatribuído.
-
Atualização de Caminho para Veículos Usando Modelos de Escolha de Rota: Define a porcentagem de veículos pertencentes a este tipo de veículo que seguem uma rota dos Route Choice Models e podem ter seu caminho reatribuído.
Há três tipos diferentes de caminhos que podem ser atribuídos a um veículo ao entrar na rede: OD Routes (rotas definidas pelo usuário), Path Assignment Result e Calculated Shortest Paths usando o Route Choice Model. As porcentagens de "Following OD Routes" e "Following Path Assignment Results" determinam a probabilidade de uso de cada uma das três opções e não precisam somar 100%. A porcentagem de OD Route é o primeiro valor a ser considerado quando um veículo entra na rede. Se a probabilidade indicar que o veículo receberá uma OD Route, então o Aimsun Next procurará um caminho de acordo com as porcentagens e rotas definidas pelo usuário. Se o veículo não for atribuído a uma OD Route, então é aplicada a probabilidade de ser atribuído a um caminho do objeto Path Assignment importado para o cenário (se houver). Por fim, se o veículo não for atribuído a uma OD Route nem a um resultado de Path Assignment, será aplicada uma escolha entre os DTA Paths calculados pelo Aimsun Next.
Por exemplo, se a atribuição fosse 60% ‘Following OD Routes’ e 70% ‘Following Path Assignment Results’, 60% dos veículos gerados seguiriam uma rota OD, 28% (70% * (100% - 60%)) seguiriam um caminho lido de um arquivo de atribuição de caminhos e 12% (100% - 60% - 28%) seguiriam um caminho construído pelo modelo de escolha de rota. Isso parte do princípio de que, para cada par OD, há uma rota definida na aba OD Matrix Path Assignment e uma rota no arquivo de atribuição de caminhos.
Consulte o Escolha estocástica de rotas seção para obter mais detalhes sobre o uso desses percentuais.
Guia do Modelo Microscópico¶
Parâmetros Principais¶
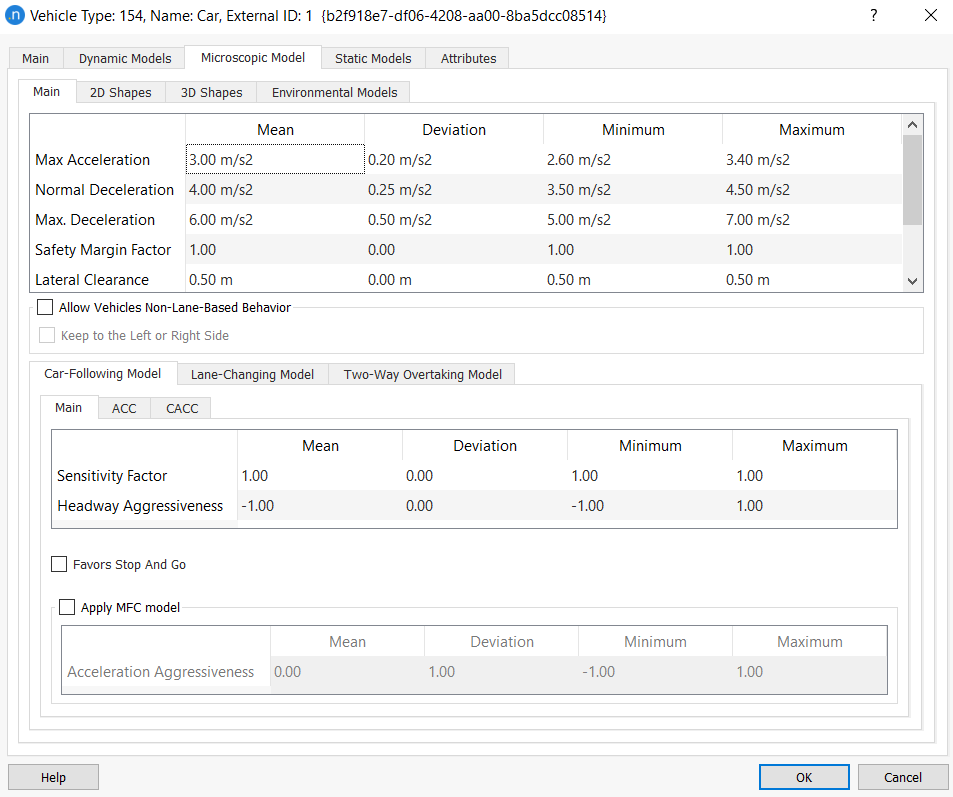
Os parâmetros nesta subaba controlam o comportamento dos veículos na simulação; consulte o seção de modelos comportamentais para mais detalhes.
Aceleração Máxima¶
Esta é a aceleração máxima, em m/s2, que o veículo pode atingir em quaisquer circunstâncias. Esta aceleração é usada no modelo de seguimento veicular de Gipps (see Gipps, 1981 and 1986b).
Desaceleração normal¶
Esta é a desaceleração máxima, em m/s2, que o veículo pode usar em condições normais. Esta desaceleração é a usada no modelo de car-following de Gipps.
Desaceleração Máxima¶
Esta é a frenagem mais severa, em m/s2, que um veículo pode aplicar em circunstâncias especiais, como frenagem de emergência, por exemplo, diante de um semáforo.
Fator de Margem de Segurança¶
No cálculos de aceitação de brechas para determinar quando um veículo pode se mover em uma interseção prioritária, a margem de segurança é definida no Tipo de Via parâmetros do movimento de conversão. Ele pode ser modificado para um movimento de conversão específico para refletir a geometria viária e pode ainda ser ajustado por tipo de veículo. Este parâmetro de tipo de veículo fornece um multiplicador, com uma faixa normal truncada, a ser aplicado aos valores de margem de segurança do movimento de conversão.
Folga lateral¶
As variações de folga lateral entre veículos vêm de distribuições definidas por tipo de veículo. O espaçamento lateral mínimo entre dois veículos é a soma das folgas laterais de ambos os veículos.
Velocidade lateral máxima¶
Ao se moverem lateralmente, os veículos usam sua velocidade lateral máxima.
Permitir Comportamento de Veículos Não Baseado em Faixas¶
O Permitir Comportamento de Veículos Não Baseado em Faixas parâmetro controla se o tipo de veículo pode considerar movimentos não baseados em faixas ou não. Para obter mais informações, consulte Simulação Microscópica Não Baseada em Faixas.
Observe que, se o comportamento não baseado em faixas estiver ativado no nível da seção, ele permite a consideração de folga lateral em todo o tráfego, isto é, para ambos veículos não baseados em faixas e veículos baseados em faixas.
Manter-se no Lado Esquerdo ou Direito¶
Em microssimulações, em que Allow Non-Lane-Based Behavior para veículos está ativado, agora você pode instruir os veículos a permanecerem próximos ao lado esquerdo ou direito da via, dependendo do sentido de deslocamento. Há uma nova opção de caixa de seleção na caixa de diálogo Vehicle Type chamada Keep to the Left or Right Side.
Esta nova opção é útil para modelar qualquer veículo que você queira manter próximo ao lado esquerdo ou direito da via, dependendo do sentido de deslocamento. A instrução não se aplica quando os veículos precisam cruzar faixas para fazer conversão à direita ou à esquerda. Seu uso óbvio é para bicicletas, mas auto-riquixás ou qualquer outro tipo de veículo podem ser instruídos a se comportar dessa forma.
Modelo de Seguimento Veicular¶
Modelo de Seguimento Veicular: Aba Principal¶
No Principal na pasta-aba da área do Modelo de Car-Following, os parâmetros padrão do modelo de car-following do Aimsun Next podem ser definidos. Eles são:
Fator de sensibilidade¶
No componente de desaceleração do modelo de car-following, o seguidor faz uma estimativa da desaceleração do líder usando o fator de sensibilidade.
Agressividade do headway¶
O parâmetro de agressividade do headway modifica a relação da distância entre veículos em função da velocidade. Essa distância é simplesmente linear no modelo de Gipps e não corresponde ao comportamento observado em condições congestionadas de rodovias. O modelo modificado de car following está documentado no Seção de Teoria da Microssimulação.
Favorece para-e-anda¶
Esta opção permite que um veículo ajuste como usa o valor de agressividade. Se a opção estiver marcada, o valor +a é usado durante a desaceleração e de –a durante a aceleração. Portanto, assumindo a for positivo, o gap entre veículos será maior durante a aceleração do que durante a desaceleração para a mesma velocidade.
Aplicar modelo MFC¶
Esta opção ativa o modelo Microscopic Free-Flow Acceleration (MFC). Ele pode estar desativado porque o outro modelo de aceleração, o modelo TWOPAS, já foi ativado. Se você quiser desativar Velocidade em Rampas Afetada pelo Peso (Modelo TWOPAS) você pode fazê-lo na subaba Main da Dynamic Models Tab. O parâmetro incluído na tabela é a agressividade de aceleração, que define o comportamento do motorista: estilo de condução e troca de marchas (usado apenas no caso de motores de combustão).
Modelo de Car-Following: abas ACC e CACC¶
Há dois modelos adicionais de seguimento veicular para modelar veículos autônomos e/ou conectados.
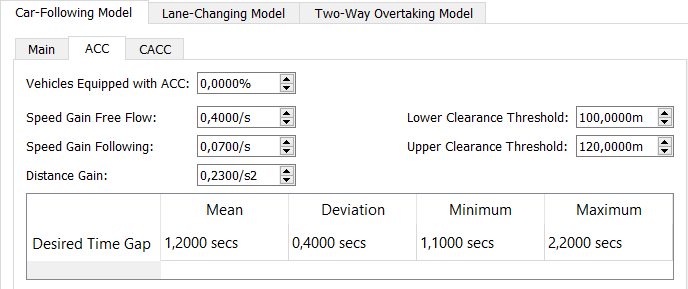
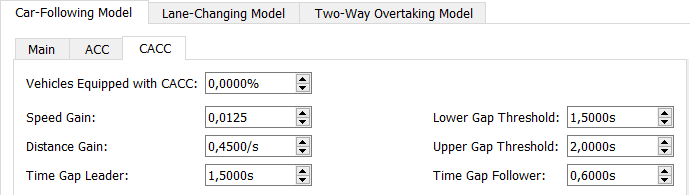
A distribuição de veículos não equipados, veículos equipados com ACC e veículos equipados com CACC é especificada por meio do Veículos Equipados com ACC porcentagem e Veículos Equipados com CACC porcentagem de cada um localizada nas abas ACC e CACC, respectivamente. Essas porcentagens devem sempre somar no máximo 100%, sendo o restante os veículos não equipados. Como exemplo, ter 20% de Veículos Equipados com ACC e 30% de Veículos Equipados com CACC resultará em 50% de veículos não controlados na rede (veículos conduzidos por humanos).
Ambos os tipos de veículo, ACC e CACC, podem executar Speed Regulation Mode, que normalmente é usado quando não há nenhum veículo à frente do veículo atual (ou se o veículo à frente está longe demais).
Veículos equipados com ACC usam o modo ACC Gap Regulation para controlar seu movimento com base no veículo à frente, se houver.
Veículos equipados com CACC usam o modo CACC Gap Regulation em vez disso.
Observe que, quando um veículo está equipado com um módulo ACC ou CACC, ele só será funcional em vias cujo tipo de via o permita. Consulte o editor de tipo de via para ativar os módulos e especificar os veículos CACC pelotão configurações.
Consulte o car-following com Adaptive Cruise Control (ACC) e Cooperative Adaptive Cruise Control (CACC) seção para a explicação dos outros parâmetros nessas abas.
Os veículos de simulação têm uma nova coluna nos atributos estáticos chamada ‘Cruise Control Capability’ para mostrar com qual módulo, se houver, o veículo está equipado. Os valores podem ser:
a. Sem capacidade b. Adaptive Cruise Control (ACC) c. Cooperative Adaptive Adaptive Cruise Control (CACC)
Os veículos de simulação têm uma nova coluna dinâmica chamada ‘Cruise Control Status’ para mostrar qual modo de condução foi usado no último passo da simulação. Os cinco valores possíveis, detalhados na Gráfico de Decisão, são:
a. Regulação de Velocidade CC b. Regulação de Espaçamento ACC c. Regulação de Espaçamento do Líder de Pelotão CACC d. Regulação de Espaçamento do Seguidor de Pelotão CACC e. Desativado
Modelo de Mudança de Faixa ¶
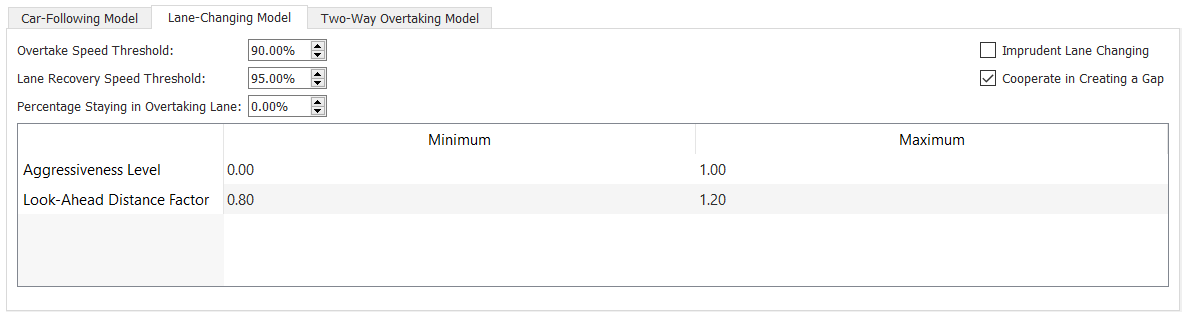
Ultrapassagem¶
Os parâmetros que afetam a mudança de faixa e a ultrapassagem em faixas paralelas são definidos pelo Tipo de Via e pode ser modificado para individuais Seções viárias. Esses valores podem então ser modificados adicionalmente por tipo de veículo para ajustar o comportamento por tipo e, se um intervalo for fornecido, para randomizar o comportamento de cada veículo.
Limite de velocidade para ultrapassagem e Limite de Velocidade de Recuperação de Faixa ¶
Esses dois parâmetros controlam as manobras de ultrapassagem na Zona 1 quando um veículo muda de faixa para ultrapassar outro. Eles estão documentados no Seção de Teoria da Microssimulação.
Se o veículo estiver restrito a trafegar a menos de Limite de velocidade para ultrapassagem de sua velocidade desejada, ele considerará uma manobra de ultrapassagem. Limite de Velocidade de Recuperação de Faixa é a porcentagem da velocidade desejada de um veículo acima da qual um veículo pode decidir retornar à faixa original.
Porcentagem que permanece na faixa de ultrapassagem¶
Define a probabilidade de que um veículo deste tipo permaneça na faixa mais rápida em vez de retornar à faixa mais lenta após uma manobra de ultrapassagem.
Mudança de Faixa Imprudente¶
Define se um veículo deste tipo ainda mudará de faixa após avaliar um intervalo inseguro.
Aceitação de Intervalo para Mudança de Faixa¶
Se o Cooperar na Criação de uma Brecha a opção estiver selecionada, veículos desse tipo poderão cooperar na criação de uma brecha para que um veículo em mudança de faixa a aceite. Com a opção ativada, o número de veículos que efetivamente cooperam depende do Cooperação para Criar uma Lacuna porcentagem da seção.
Se o Cooperar na mudança de faixa a opção está selecionada, veículos deste tipo podem cooperar em confluências e rampas de entrada saindo da faixa onde os veículos em incorporação devem entrar. Com a opção ativada, o número de veículos que efetivamente cooperam depende do Cooperação na Mudança de Faixa porcentagem da seção.
Nível de Agressividade controla o Modelo de Aceitação de Brechas para Mudança de Faixa afetando o gap reduzido que um veículo aceitará para fazer uma mudança de faixa. Quanto maior o nível, menor o gap que o veículo aceitará, sendo um nível de 1 o próprio comprimento do veículo.
Antecipação na mudança de faixa¶
O Fator de Antecipação é usado para modificar os look-aheads usados no Modelo de Mudança de Faixa para determinar onde os veículos consideram sua escolha de faixa para um próximo movimento de conversão. As distâncias padrão são definidas no Tipo de Via e pode ser modificado para cada movimento de conversão para refletir as condições locais na Editor de Movimentos de Conversão. As distâncias de zona podem então ser modificadas por um fator por tipo de veículo para ajustar onde as mudanças de faixa começam a ser consideradas e, se um intervalo for fornecido, para randomizar o comportamento de cada veículo desse tipo.
modelo de Ultrapassagem em Duas Mãos¶
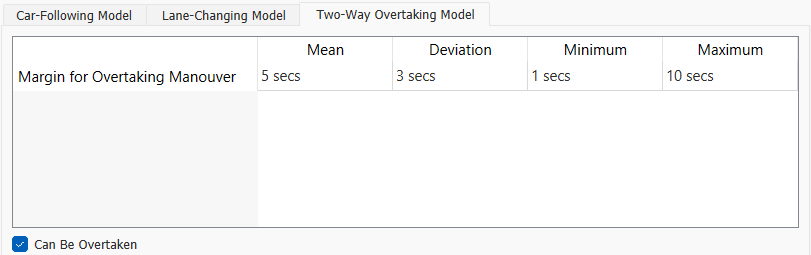
Margem para Manobra de Ultrapassagem¶
A margem de segurança para ultrapassagem em via de mão dupla é definida aqui como uma distribuição normal truncada. Os algoritmos que controlam a manobra de ultrapassagem em via de mão dupla são descritos na Teoria de Microssimulação: Seção do Modelo de Ultrapassagem em Mão Dupla.
Pode ser ultrapassado¶
Este parâmetro especifica se um veículo pertencente a este tipo de veículo pode ser ultrapassado ou não. Por padrão, novos tipos de veículos permitirão ultrapassagem, mas pode haver casos, como veículos OSOM ou de produtos perigosos, que não podem ser ultrapassados.
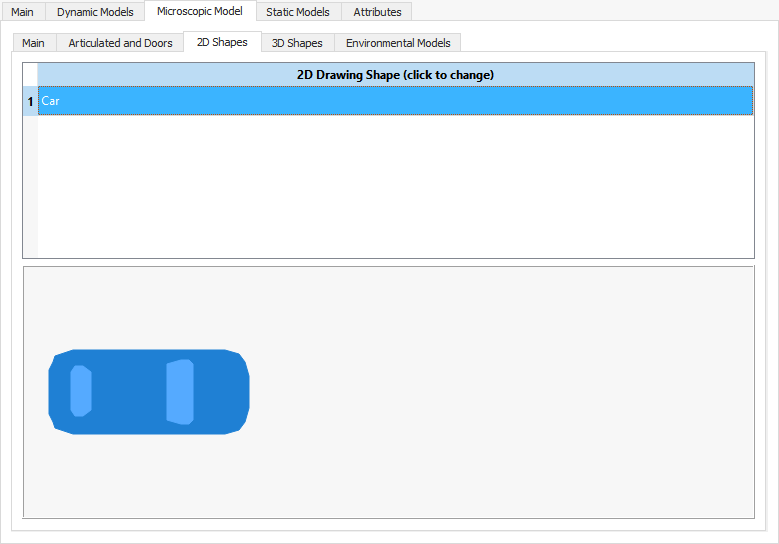
Formas 2D¶
Nas visualizações 2D, os veículos da microssimulação podem ser desenhados de várias maneiras (como carro, ônibus, caminhão, caminhão longo, van, bicicleta, motocicleta, pedestre, caixa, círculo, avião, riquixá, auto-riquixá, ciclo-riquixá, riquixá elétrico, trator e reboque). Use a pasta 2D Shapes para selecionar a forma como todos os veículos de simulação pertencentes ao tipo de veículo atualmente editado serão desenhados. Se o tipo de veículo atual tiver sido definido como articulado, então uma 2D Shape pode ser definida para cada uma das partes articuladas.
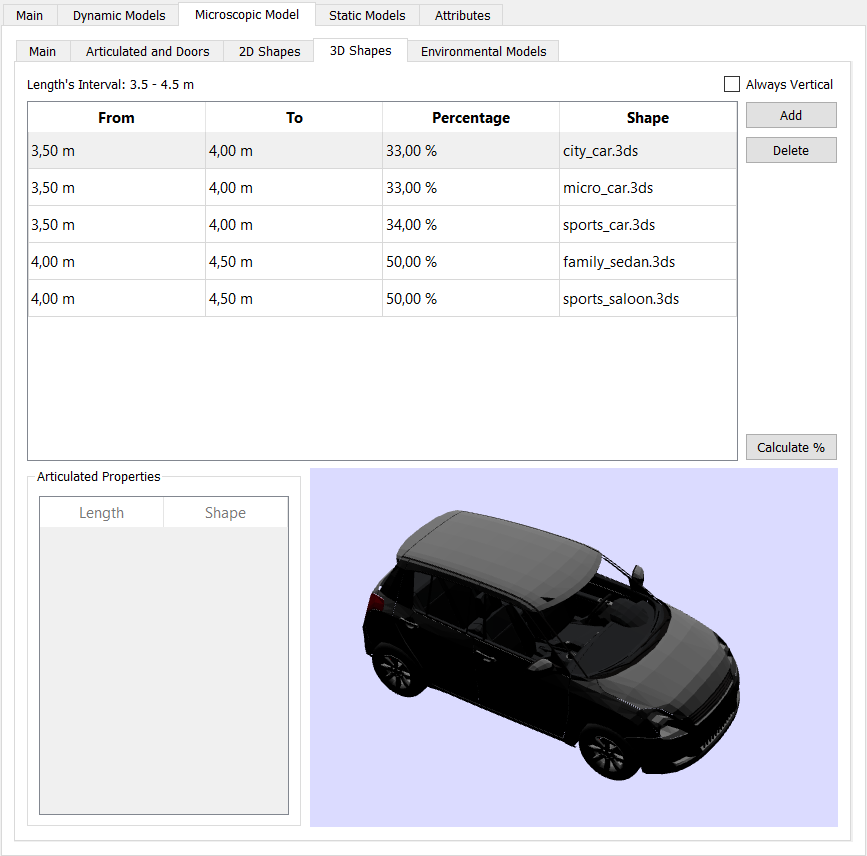
Formas 3D¶
Em visualizações 3D, os veículos da simulação são desenhados usando formas 3DS. Clique na aba 3D Shapes e selecione as formas 3DS a serem usadas para veículos de simulação pertencentes a este tipo de veículo.
O Sempre Vertical opção garante que os objetos (veículos e pedestres, quando relevante) mantenham seu aspecto vertical ao se moverem em aclives ou declives. Isto deve ser desmarcado para veículos rodoviários para garantir que eles sigam o gradiente conforme esperado. Deve ser marcado para pedestres, de modo que se movam de forma realista, no ângulo correto, por exemplo ao subir e descer escadas.
Modelos Ambientais¶
Todos os parâmetros do modelo ambiental são configurados em torno dos tipos de motor dos veículos. Você pode definir as porcentagens de tipos de motor para veículos na caixa de diálogo Vehicle Type > Dynamic Models > subaba Engine. Atualmente, veículos não motorizados e motocicletas estão excluídos.
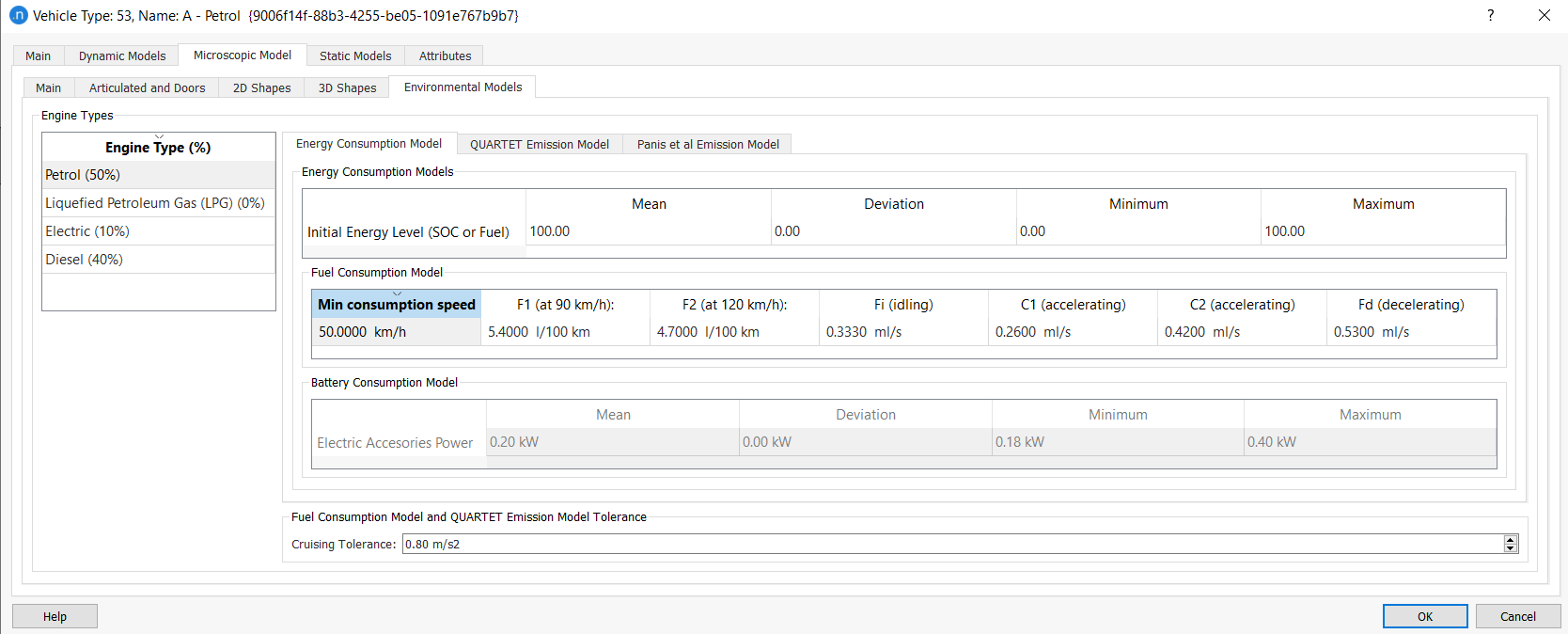
Consumo de energia¶
Os modelos de consumo de energia incluem o Modelo de Consumo de Combustível para motores a combustão e o Modelo de Consumo de Bateria para veículos elétricos. Você pode editar os parâmetros de ambos os tipos de modelo para cada tipo de motor de qualquer tipo de veículo.
Você pode fazer isso na caixa de diálogo Tipo de Veículo > Modelo Microscópico > subaba Modelos de Consumo de Energia. As formas como esses parâmetros são usados são descritas em Modelo de Consumo de Combustível e Modelo de Consumo de Bateria.
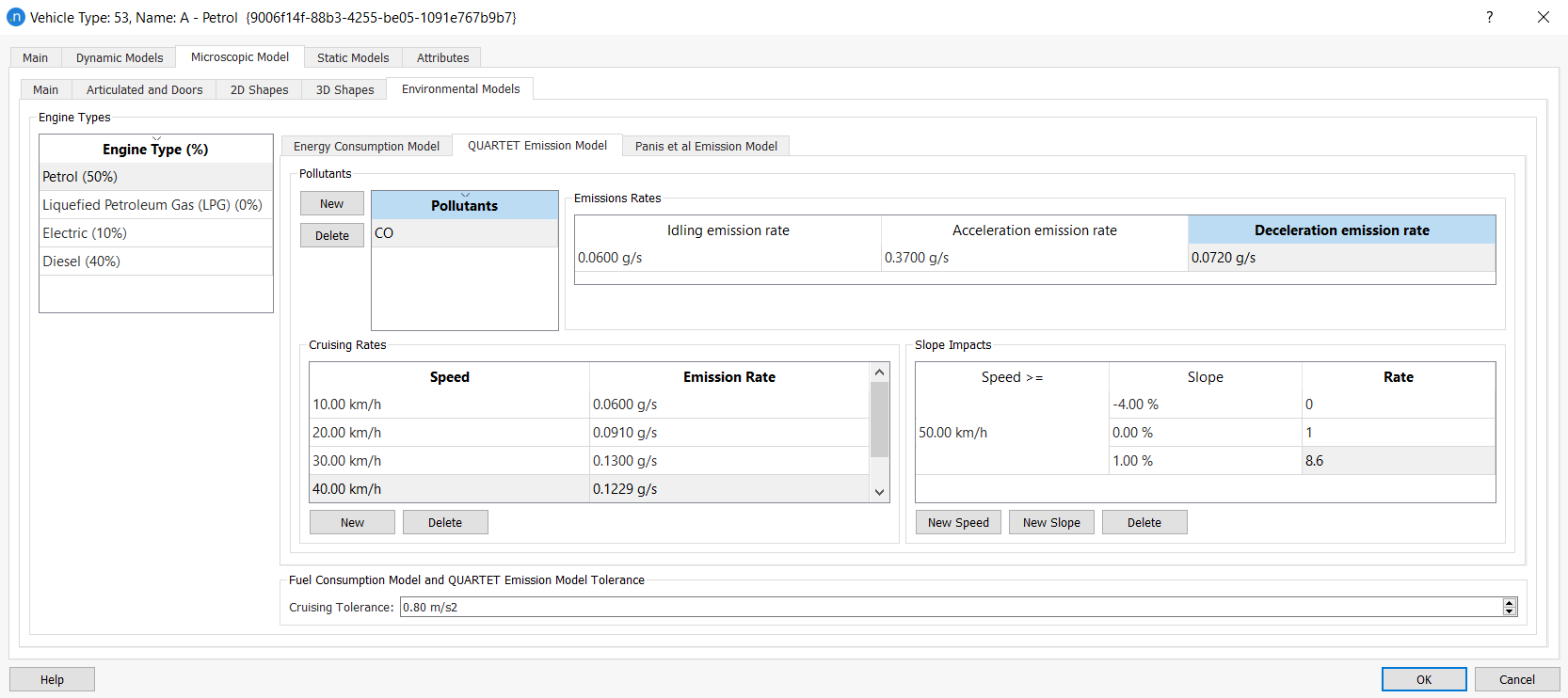
Modelo de Emissões Quartet¶
Na subaba QUARTET Emission Model, os parâmetros do modelo de emissões QUARTET são definidos por Engine Type (%). Este utilitário foi projetado para produzir um 'balanço' de todos os poluentes gerados durante a simulação.
Quando você cria um poluente para um tipo de veículo, ele é criado automaticamente para all outros tipos de veículos e disponível para todos os tipos de motor. Da mesma forma, se você renomear um poluente, a alteração será aplicada a todos os tipos de veículos. Isso garante que todos os tipos de veículos tenham sempre a mesma lista de poluentes. Somente as taxas de emissão diferirão entre os tipos.
Para criar um novo poluente, clique no Novo botão e insira o nome e seus três parâmetros. IER significa Idling Emission Rate, AER e DER significam Acceleration e Deceleration Emission Rates, respectivamente. As taxas dependentes da velocidade para este poluente devem ser inseridas para pelo menos uma velocidade. Clique no Novo botão na parte inferior da caixa de diálogo e insira os dados.
As taxas de velocidade-emissão são usadas para veículos que trafegam a uma velocidade constante. Se a velocidade não for constante, então são usados IER, AER e DER. Se houver apenas um par velocidade-emissão para um poluente, essa taxa de emissão será usada para todos os veículos que trafegam a qualquer velocidade constante. Se houver mais de um par, as taxas de emissão para veículos que trafegam a uma velocidade constante dependerão dos intervalos de velocidade definidos pelos diferentes pares. Os intervalos de velocidade são dados por seu limite superior. Por exemplo, se as velocidades na lista forem 10, 20, 30, 40, 50, 60 e 70, a taxa de emissão em velocidade constante terá valores diferentes para velocidades nos intervalos 0-10, 10-20, 20-30, 30-40, 40-50, 50-60 e 60-70 km/h.
Presume-se que os veículos que trafegam a velocidades superiores a 70 km/h tenham a mesma taxa de emissão que aqueles que trafegam a 70 km/h. Esta é uma decisão de projeto experimental.
Além disso, a inclinação nas seções pelas quais o veículo está trafegando também pode ser considerada ao coletar emissões. Quando nenhum intervalo de inclinação tiver sido definido, as taxas de emissão serão aquelas definidas na tabela de taxas de cruzeiro. Se intervalos de inclinação forem definidos, as taxas de emissão serão multiplicadas pelo fator definido nos intervalos de inclinação. Tanto os intervalos de velocidade quanto os percentuais de inclinação são dados por seu limite inferior. Normalmente considera-se que, quando a inclinação é 0%, as taxas de emissão serão as mesmas que as taxas de cruzeiro; quando a inclinação é ascendente, o fator multiplicador será maior que 1; e, quando a inclinação é descendente, o fator multiplicador ficará entre 0 e 1. Por exemplo, as inclinações na lista definem um impacto de 0,0 para inclinações de -4% a 0%, não têm impacto quando a inclinação é ascendente de 0 a 1% e têm um impacto de 8,6 quando a inclinação é ascendente e maior que 1%; todos esses impactos são para velocidades dos veículos superiores a 60 km/h.
Para obter mais informações sobre o modelo Quartet, consulte o Modelo de Emissão de Poluentes QUARTET seção.
Tolerância de Cruzeiro para Modelos QUARTET¶
Veículos com aceleração inferior a este valor são considerados como trafegando em velocidade constante pelo modelo de emissão de poluentes e pelo modelo de consumo de combustível. Isso se aplica a todos os tipos de motor.
Modelo de Emissões de Panis et al.¶
O Aimsun Next pode modelar emissões instantâneas de poluentes causadas por aceleração/desaceleração e velocidade para todos os veículos na simulação com base no artigo de Luc Int Panis, Steven Broekx, Ronghui Lui: Modelagem de emissões instantâneas de tráfego e a influência dos limites de velocidade do tráfego. Em cada passo de simulação, ele mede as emissões de cada poluente usando a mesma fórmula, mas considerando valores de fator diferentes de acordo com cada tipo de motor incluído no tipo de veículo e medidas instantâneas de aceleração/desaceleração.
Em particular, o modelo de emissões instantâneas considera Dióxido de Carbono (CO2), Óxidos de Nitrogênio (NOx), Compostos Orgânicos Voláteis (VOC) e Material Particulado (PM).
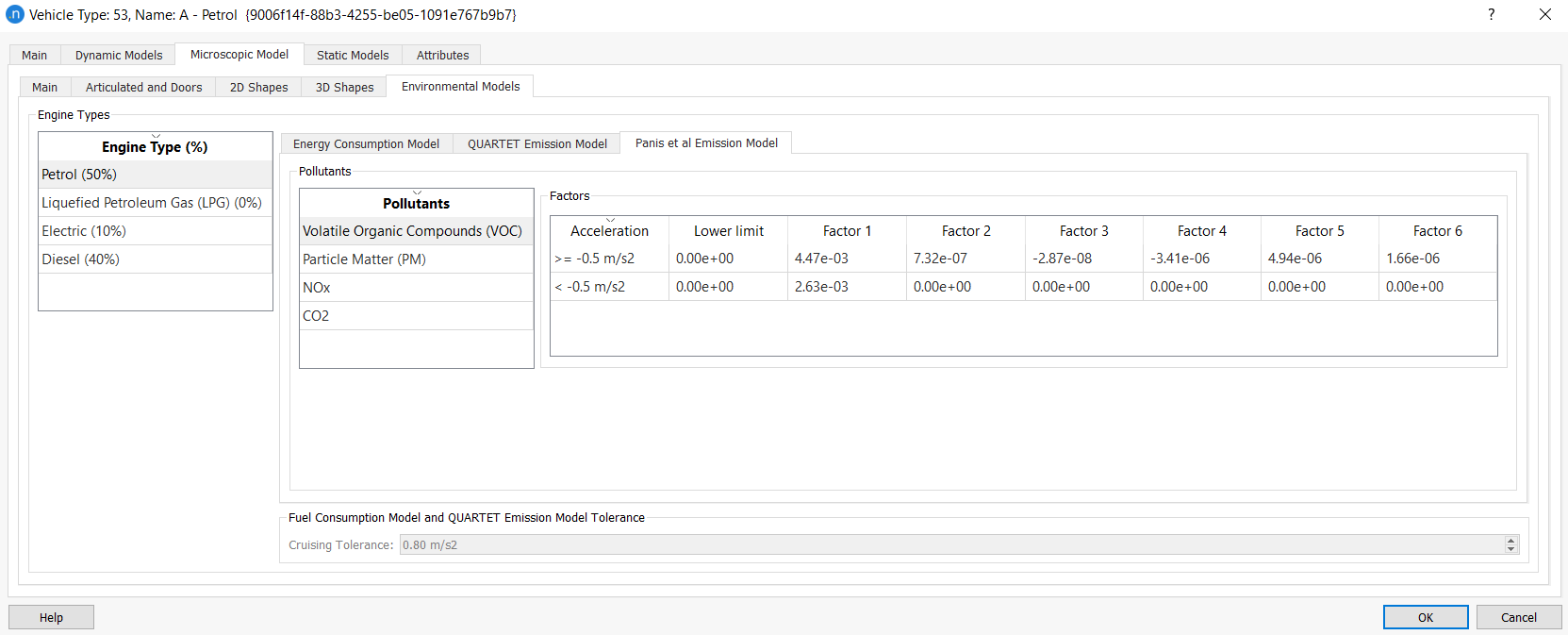
Nota: O Modelo de Emissão de Poluentes Panis assume que os veículos Ônibus e HDV usam Diesel. Se o percentual em Gasolina ou GLP for maior que 0, o modelo ainda calculará valores de poluição apenas para veículos Diesel.
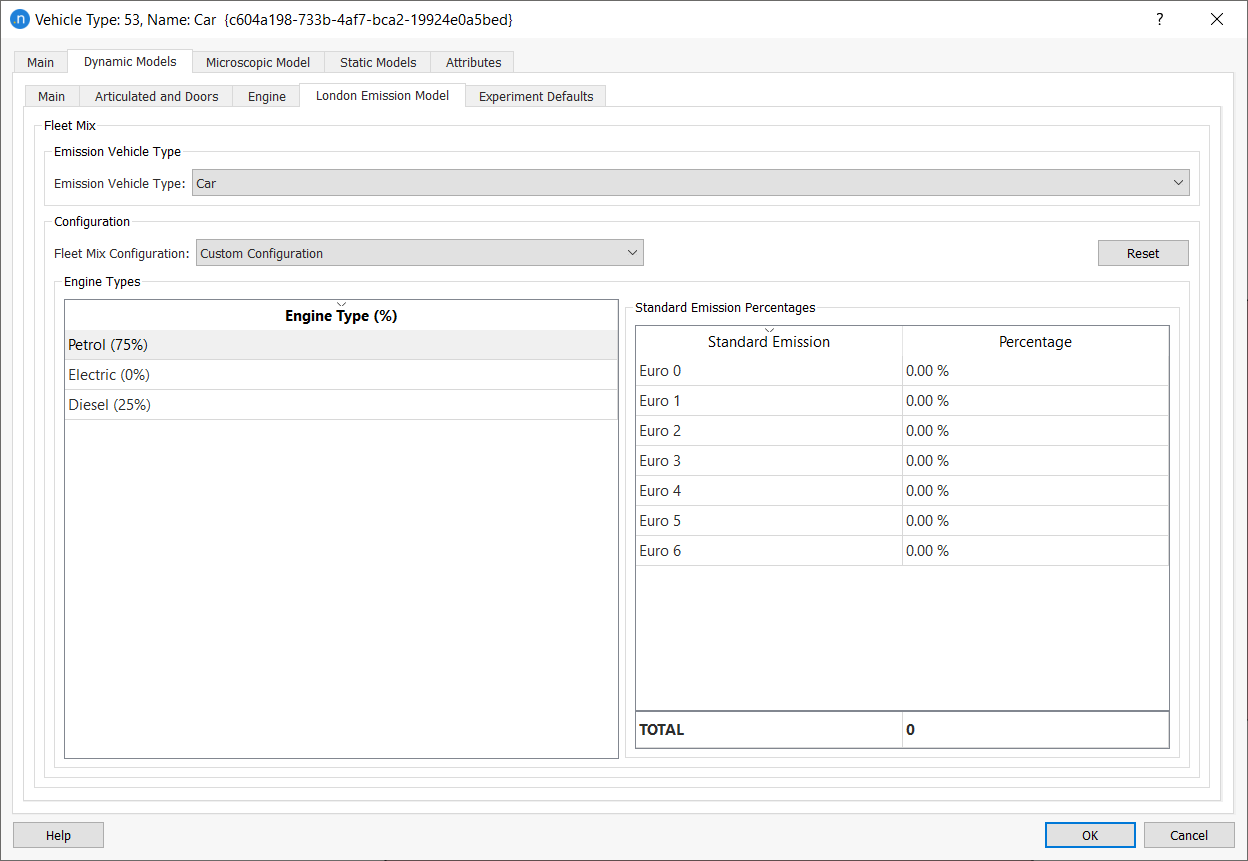
Modelo de Emissões de Londres (LEM)¶
Você pode definir os parâmetros do LEM na caixa de diálogo Vehicle Type > Dynamic Models > subaba London Emissions. Ele é compatível tanto com modelos microscópicos quanto mesoscópicos.
Aqui você pode definir as características de emissões para cada tipo de veículo, que serão usadas para alocar classes de emissões Euro, por tipo de motor, a cada veículo. Isso é feito de acordo com o Emission Vehicle Type selecionado e as proporções definidas na lista Engine Type (%).
Estas configurações definem como as emissões são estimadas, usando o LEM desenvolvido pela ITS Leeds em colaboração com a Transport for London e a Aimsun.
Você pode usar a lista suspensa Emission Vehicle Type para escolher a classe de veículo que deseja usar no modelo de emissões, juntamente com quaisquer subtipos suportados pela categoria de veículo selecionada na aba Engine.
A lista contém Carro e Táxi para a categoria Car, Veículo de Carga Pesado (LGV) e Veículo leve de carga (LGV) para a categoria de veículos Comerciais, e Ônibus de Um Andar, Ônibus de Dois Andares, e Instrutor para a categoria Bus. Esses itens estão vinculados a valores calibrados derivados de medições feitas quando o modelo foi desenvolvido.
Você pode definir a configuração de frota para o tipo de veículo selecionado na lista suspensa Fleet Mix Configuration. A lista inclui configurações padrão disponíveis descritas por uma localização e um ano (por exemplo, London 2017).
Se você selecionar Custom Configuration na lista, poderá então editar as porcentagens para o Euro Emission Standard. Clique em Redefinir para alterar todos os valores para zero.
Para obter mais informações sobre o London Emission Model (LEM), consulte o Modelo de Emissões de Londres capítulo.
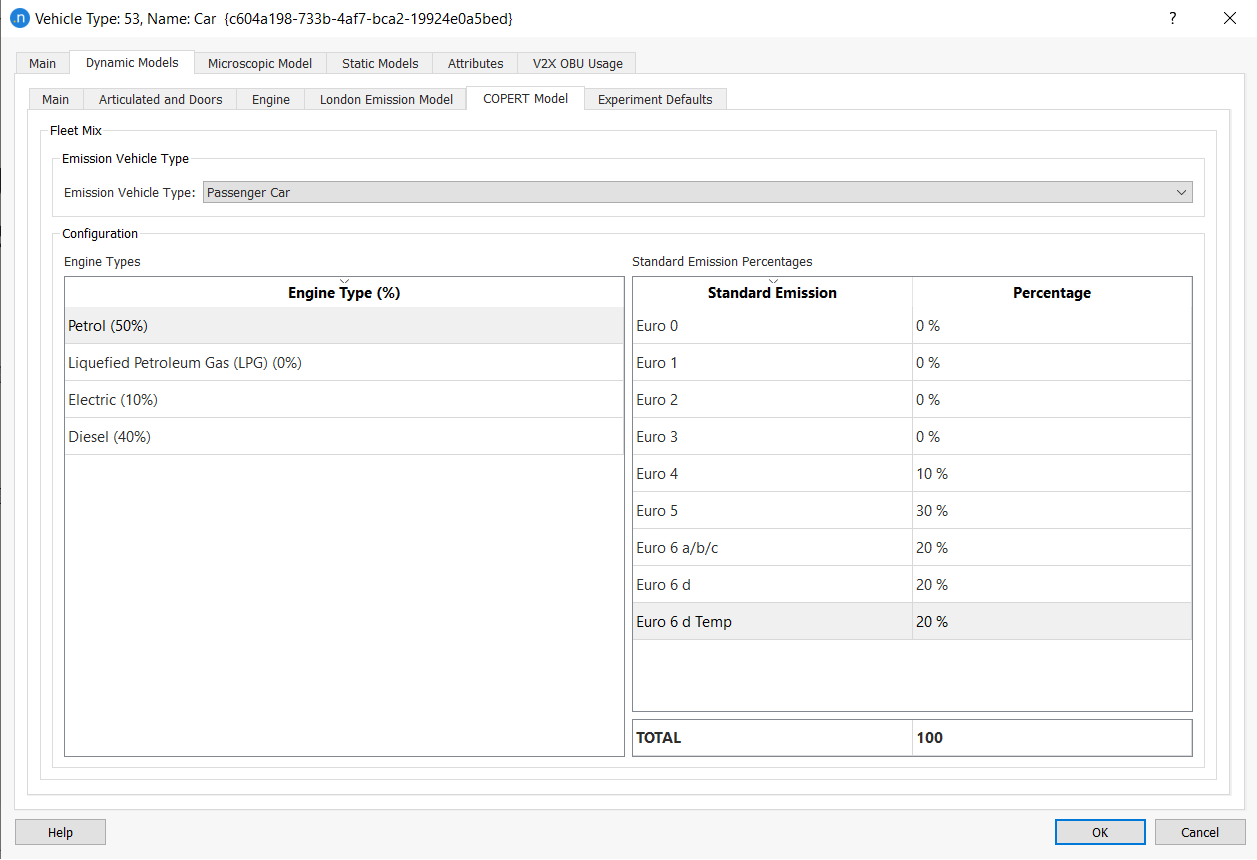
Modelo de Emissões COPERT¶
Você pode definir os parâmetros do COPERT na caixa de diálogo Tipo de Veículo > Modelos Dinâmicos > subaba Modelo COPERT. Ele é compatível com o microscópico e como via rápida para o Next 24.0.2. No futuro, será incluído nos modelos mesoscópicos.
Aqui você pode definir as características de emissões para cada tipo de veículo, que serão usadas para atribuir classes de emissões Euro, por tipo de motor, a cada veículo. Isso é feito de acordo com o Tipo de Veículo de Emissão selecionado e com as proporções definidas na lista Tipo de Motor (%). Está incluída uma configuração semelhante à do Modelo LEM, mas, neste caso, o modelo é mais atualizado e inclui os padrões de Emissões mais recentes.
Estas configurações definem como as emissões são estimadas, usando o COPERT desenvolvido pelo Joint Research Centre da Comissão Europeia e coordenado pela Agência Europeia do Ambiente (EEA).
Você pode usar a lista suspensa Emission Vehicle Type para escolher a classe de veículo que deseja usar no modelo de emissões, juntamente com quaisquer subtipos suportados pela categoria de veículo selecionada na aba Engine.
A lista contém Automóvel para a categoria Car, Veículo Comercial Leve e Caminhão Pesado para a categoria de veículos Comerciais, e Ônibus e Instrutor para a categoria Bus. No futuro, motocicletas serão incluídas. Esses itens estão vinculados a valores calibrados derivados de medições realizadas quando o modelo foi desenvolvido.
Para mais informações sobre o Modelo de Emissões COPERT, consulte o Modelo de Emissões COPERT capítulo.
Modelos estáticos¶
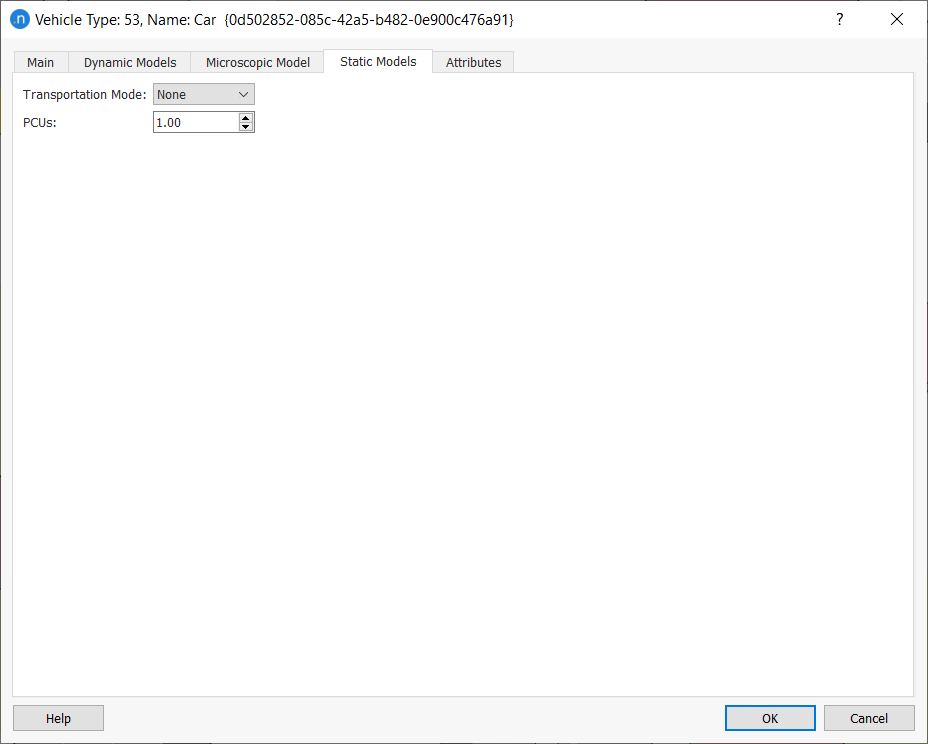
Na aba Static Models, dois parâmetros são definidos: Modo de Transporte e PCUs.
-
Um Tipo de Veículo pode pertencer a um Modo de Transporte (por exemplo, Car pode pertencer ao Mode Private). Esta informação é usada ao modelar a Demanda de Viagens com o Modelo de Quatro Etapas.
-
O PCUs parâmetro (Passenger Car Unit) é uma medida do espaço de que um Type of Vehicle precisa em comparação com um automóvel de passeio. Ou seja, o automóvel particular é considerado como a unidade, 1 PCU, e o restante dos veículos é convertido para essa unidade por um fator.
Atributos¶
Os atributos adicionais que caracterizam um tipo de veículo são definidos nesta aba.
Como parâmetros avançados de calibração, que raramente precisam ser modificados, você pode encontrar os seguintes:
Intervalo¶
Este parâmetro é usado para substituir o headway entre veículos conforme calculado pelo modelo de car following. O headway entre dois veículos é definido como a distância em segundos entre o para-choque dianteiro de um veículo e o para-choque dianteiro do veículo seguinte. O valor padrão do parâmetro Gap de 0.0 usa a distância calculada pelo algoritmo de car-following. Se um valor diferente for usado, então o mínimo entre o Gap e a distância padrão será usado. A aplicação deste parâmetro está documentada na Microsimulation Theory: Seção Algoritmo de Car Following. Os atributos a serem procurados são Gap Médio, Gap Máx., Gap Mín. e Desv. de intervalo para definir os valores médio, máximo e mínimo, bem como o desvio padrão que definem a distribuição normal.