Simulação Microscópica Não Baseada em Faixas¶
Introdução¶
O simulador microscópico do Aimsun Next pode modelar movimentos laterais de veículos não baseados em faixas.
O modelo não baseado em faixas destina-se à simulação microscópica em escala urbana, portanto concentra-se no desempenho em larga escala e em saídas agregadas, em vez de focar na máxima fidelidade na representação de trajetórias realistas para cada veículo.
Isso permite uma representação mais realista do tráfego em ambientes onde múltiplos veículos podem ocupar a mesma posição longitudinal dentro de uma faixa. A capacidade de ativar movimentos não baseados em faixa – por tipo de veículo e por seção – torna o recurso altamente flexível e capaz de simular situações que vão desde o comportamento específico de motocicletas em fluxos baseados em faixa (por exemplo, em cidades europeias como Barcelona) até tráfego totalmente não baseado em faixa, incluindo tipos de veículos com uma gama mais ampla de características (por exemplo, aquelas observadas no tráfego indiano).
Ativar o comportamento sem faixas na rede (no nível do experimento e da seção, conforme explicado abaixo) habilita a percepção lateral de todos os veículos presentes em uma seção. Isso torna as larguras dos veículos e das faixas parâmetros efetivos dentro da simulação.
Observe que o comportamento Non-lane-based não é suportado em seções onde o Modelo de ultrapassagem bidirecional de duas faixas está ativo.
As seções abaixo fornecem uma visão geral dos parâmetros adicionais necessários para movimentos de veículos não baseados em faixas, das modificações feitas no modelo de car-following para incluir múltiplos líderes e do modelo de seleção de trajetória usado para calcular a posição lateral pretendida do veículo.
Parâmetros do modelo¶
O modelo de comportamento não baseado em faixas requer dois parâmetros que restringem o espaçamento lateral e os movimentos dos veículos. Estes são os Folga lateral e Velocidade lateral máxima e podem ser especificados na caixa de diálogo Vehicle Type na aba Modelo Microscópico > subaba Principal.
Gerenciamento de múltiplos líderes¶
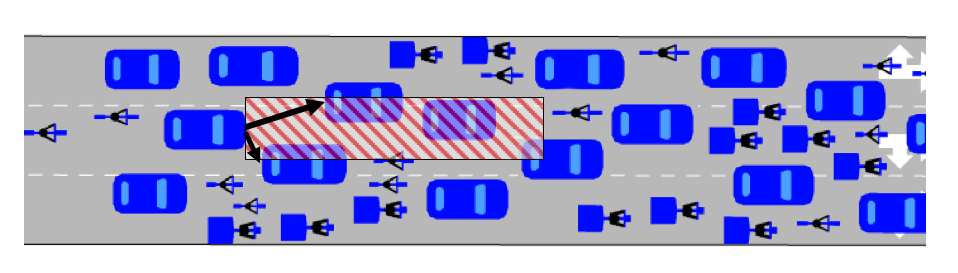
A abordagem não baseada em faixas exige que múltiplos líderes sejam considerados. A varredura por líderes é limitada a uma faixa retangular, limitada lateralmente pelos pontos mais à direita e mais à esquerda que o veículo pode alcançar durante sua manobra atual, com a folga lateral incluída e a velocidade lateral considerada.
Se o veículo não tiver movimento lateral naquele momento, a faixa é simplesmente definida por sua largura mais as folgas laterais. Se o veículo estiver mirando alguma posição lateral, a faixa se estende até a posição lateral final, levando em conta também a largura e a folga lateral.
Depois que a faixa é definida, os veículos dentro dela, mas cuja traseira não é inteiramente visível do ponto de vista do veículo seguinte — porque há outro veículo entre eles — são descartados, pois têm apenas uma influência indireta (eles são os líderes dos veículos que os estão ocluindo parcialmente).
Entre todos os líderes que atendem a esses critérios, o mais restritivo é definido como aquele que seria capaz de parar mais próximo do veículo que está procurando líderes. Na ilustração abaixo, dois líderes são identificados na faixa longitudinal a jusante. O modelo completo de seguimento veicular é aplicado apenas em relação ao líder mais restritivo.
Seleção de caminho¶
Veículos com comportamento não baseado em faixas ativado usam um modelo de seleção de caminho para selecionar sua posição lateral na via como substituição completa dos modelos de mudança de faixa e aceitação de brechas baseados em faixas.
Se um veículo não puder alcançar o movimento de conversão a jusante a partir de sua posição atual, ou se seu líder atual estiver impedindo que ele alcance uma velocidade satisfatória (definida como uma porcentagem de sua velocidade máxima desejada atual), o veículo procura um novo caminho que leve a uma posição melhor.
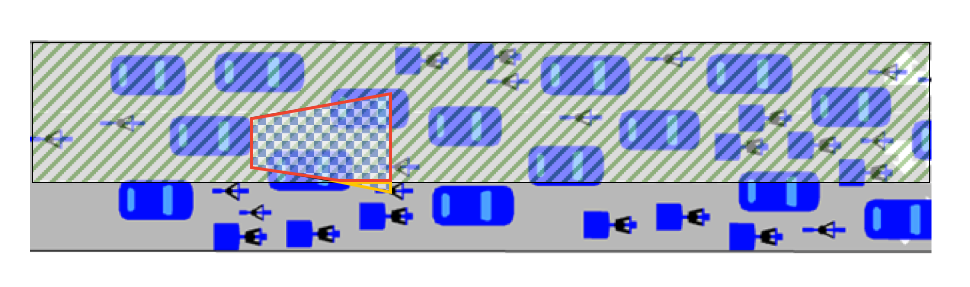
A localização lateral ideal para cada veículo é calculada com base em numerosos fatores, incluindo as faixas válidas para movimentos de conversão a jusante, as condições atuais de tráfego, os veículos ao redor e características do veículo, como largura, folga lateral e velocidade lateral máxima. Muitas dessas características, por exemplo, as faixas válidas, são compartilhadas com o modelo baseado em faixas do Aimsun Next, garantindo uma integração perfeita do modelo não baseado em faixas com todos os outros modelos.
Na ilustração a seguir, a área hachurada define as faixas válidas, enquanto a área quadriculada define os locais alcançáveis no próximo passo de simulação. A velocidade lateral máxima considera o alargamento da área de locais alcançáveis. O domínio acessível para a busca da melhor localização, delineado em vermelho, é a interseção entre as faixas válidas e os locais alcançáveis.
Para evitar oscilações laterais, a decisão de procurar uma posição melhor pode ser tomada a cada passo de simulação, desde que o veículo não esteja atualmente se dirigindo para uma nova posição lateral, ou se o último movimento lateral tiver sido concluído um ou mais tempos de reação antes.
A visibilidade à frente na área acessível é definida pela distância máxima de frenagem de todos os veículos na rede. Esta é a distância máxima a partir da qual os veículos à frente afetam a velocidade dos veículos atrás deles.
A visibilidade é limitada a esta área para tornar o modelo mais eficiente. A distância máxima de frenagem é definida pela velocidade da seção e pelos tempos máximos de desaceleração e reação de um veículo. Todos os tipos de veículos têm a mesma definição de visibilidade à frente, mas ela pode diferir de acordo com a velocidade da seção.
Ativação do comportamento não baseado em faixas em uma microssimulação¶
Para permitir movimentos laterais de veículos não baseados em faixas em uma microssimulação, o comportamento precisa ser ativado nos três níveis a seguir.
- Experimento: especifica quais experimentos são modelados com movimentos não baseados em faixas.
- Tipo de Veículo: especifica quais tipos de veículo podem realizar movimentos não baseados em faixa.
- Seção: especifica quais seções na rede são modeladas com movimentos não baseados em faixas.
Esses três níveis fornecem flexibilidade na personalização de experimentos com base na geometria viária, localização e composição do tráfego. Por exemplo, movimentos não baseados em faixas podem ser ativados apenas para seções de um tipo viário específico ou em aproximações de grandes interseções. As etapas para ativação em cada nível são descritas abaixo.
Ativação do comportamento não baseado em faixas no nível do experimento¶
Em um experimento, clique no Comportamento aba e marque Permitir Comportamento de Veículos Não Baseado em Faixas.
Ativação do comportamento não baseado em faixas no nível do tipo de veículo¶
A opção de comportamento não baseado em faixas pode ser ativada para todos os veículos ou para um subconjunto selecionado de veículos. Por exemplo, em modelos europeus, movimentos não baseados em faixas podem ser habilitados para bicicletas e motocicletas, enquanto carros, caminhões e ônibus manteriam movimentos baseados em faixas. Em tráfego totalmente não baseado em faixas, onde movimentos laterais são permitidos para todos os veículos, a opção deve ser ativada individualmente para cada tipo de veículo.
Em uma caixa de diálogo Tipo de Veículo, clique no aba Modelo Microscópico > subaba Modelo de Mudança de Faixa e marque Permitir Comportamento de Veículos Não Baseado em Faixas. Repita isso para todos os veículos que você deseja modelar usando comportamento não baseado em faixas.
Ativando comportamento não baseado em faixas no nível da seção¶
A opção de comportamento não baseado em faixas pode ser ativada para uma seção, um subconjunto de seções ou para todas as seções de toda a rede. Você pode optar por ativar movimentos não baseados em faixas apenas em determinadas áreas do modelo onde esse comportamento é observado, por exemplo, vias largas com condições altamente congestionadas.
Para ativar o comportamento não baseado em faixas em uma seção, abra a caixa de diálogo Seção e clique em Modelos Dinâmicos aba. Na Micro caixa de grupo, marque Permitir Comportamento de Veículos Não Baseado em Faixas.
Como alternativa, use o Visualização em tabela para definir o Permitir Movimentos Não Baseados em Faixas atributo para True para ativar o comportamento para múltiplas seções. Se não for exibido na Table View, acesse o atributo clicando Visibilidade da coluna.
Observe que ativar o comportamento não baseado em faixas no nível da seção permite considerar a folga lateral em todo o tráfego, isto é, para ambos veículos não baseados em faixas e veículos baseados em faixas.