Modelagem do Movimento de Veículos¶
O processo de movimentação de veículos em um modelo de microssimulação leva em conta múltiplos aspectos:
- Entrada de Veículos
- Seguimento veicular
- Seguimento Veicular em Duas Faixas
- car-following com Adaptive Cruise Control (ACC) e Cooperative Adaptive Cruise Control (CACC)
- Escolha de faixa
- Mudança de faixa
- Aceitação de Intervalo para Mudança de Faixa
- Convergência de rampa
- Aceitação de brechas em nós
- Ultrapassagem em Mão Dupla
- Aceleração e Declividades
- Parâmetros do motorista
- Parâmetros
- Sementes Aleatórias
- Comportamento não baseado em faixas
Entrada de Veículos¶
Chegadas¶
A matriz OD ou o Traffic State especificado no objeto Traffic Demand descreve quantos veículos entrarão na rede de simulação em cada conexão a partir de cada centroide. Os algoritmos de chegadas controlam quando esses veículos chegam à simulação e os headways entre eles. Os algoritmos de chegadas são Exponential, Uniform, Normal, Constant, External e ASAP e estão documentados no Algoritmo de Chegada seção.
Entrada¶
O cálculo para determinar se há espaço suficiente para um veículo entrar na rede usa os parâmetros da seção de entrada, os parâmetros do último veículo (o líder) que entrou na seção de entrada e os parâmetros do veículo que está tentando entrar.
Parâmetros da seção de entrada:
- o Speed Limit (MaxSectionSpeed).
Parâmetros do veículo líder:
- a posição atual (Pos) do veículo.
- a velocidade atual (Speed) do veículo.
- a desaceleração normal (MaxDecel) para o tipo de veículo.
- o comprimento (L) para o tipo de veículo.
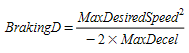
- a distância de frenagem do líder definida como a distância necessária para pará-lo aplicando a desaceleração máxima:
Os parâmetros do veículo tentando entrar:
- a Velocidade Máxima Desejada Média (MaxSpeed).
- a Aceitação Média do Limite de Velocidade (θ).
- a desaceleração máxima média (MaxDecel).
- A velocidade máxima desejada na seção de entrada definida como:

- a distância mínima de seguimento entre este veículo e o líder
- a distância de frenagem do veículo que entra, definida como a distância necessária para pará-lo aplicando a Normal Deceleration:

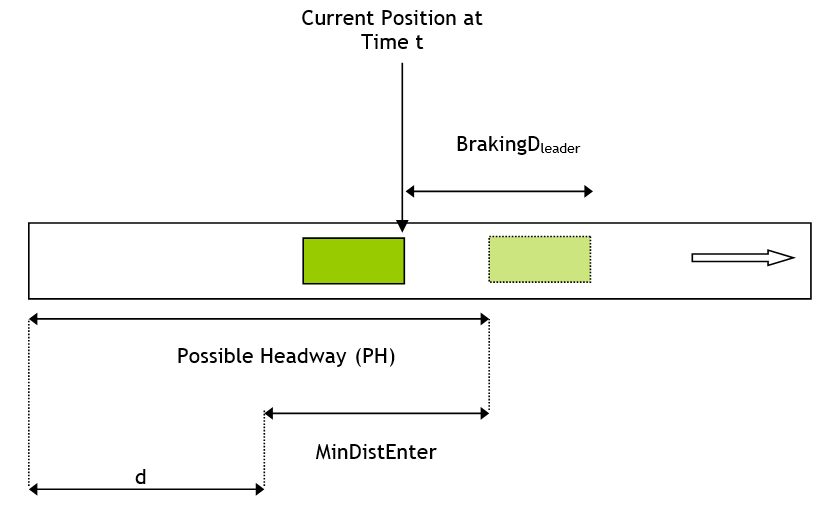
O espaço possível para entrar (PH: Possible Headway) é então definido como:


e o espaço requerido (MinDistEnter) é a distância de frenagem para o veículo que está entrando. Portanto, para entrar com segurança, a lógica é:
if (PH >= MinDistEnter) then
The vehicle has enough space
Else
The vehicle does not have enough space
Endif
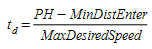
Para posicionar o veículo na rede, o tempo de entrada e a posição são derivados da seguinte forma.
O tempo \(t_d\) necessária para percorrer a distância \(d\) é:
Portanto, o horário de entrada \(t_{real}\) é definido por:

em que:
- \(t_e\) é o tempo teórico de entrada
- \(t\) é o tempo de simulação
- \(cycle\) é o passo da simulação

Quando o horário de entrada é conhecido, então a posição de entrada é definida por:

Filas Virtuais de Entrada¶
Quando uma entrada de veículo é programada pelo Algoritmo de Chegada, mas não há espaço suficiente para entrar, então o veículo é colocado em uma fila virtual para essa seção. Isso é mostrado no Aba Filas Virtuais do Section Editor. A definição de filas virtuais de entrada depende da geração de tráfego e do algoritmo de chegada usado para introduzir veículos na simulação.
Se a demanda de tráfego estiver definida como um Estado de Tráfego:
-
Modelo de geração de tráfego- Exponential, Uniform, Normal e Constant: A fila virtual de entrada é definida como uma lista de tipos de veículos. O processo de entrada consiste em pegar o primeiro elemento da lista e gerar o veículo. Se o tamanho da lista for maior que um valor definido, então o Aimsun Next exibe uma mensagem de aviso.
An example of virtual queue for one entrance section could be Car Car Bus Taxi Car Truck Car ... -
Modelo de geração de tráfego - ASAP: A fila virtual de entrada é definida como uma lista de elementos, em que cada elemento representa um tipo de veículo e o número de veículos desse tipo aguardando entrada. O processo de entrada seleciona aleatoriamente um veículo da lista, preservando a proporção dos tipos de veículos.
An example of a virtual queue for one entrance section could be: Vehicle Type Number of Vehicles ------------- ------------ Car 10 Bus 2 Taxi 4 ... ... Truck 2
Se a demanda de tráfego estiver definida como uma Matriz OD
-
Modelo de geração de tráfego - Exponencial, Uniforme, Normal e Constante: A fila virtual de entrada é definida como uma lista de elementos, em que cada elemento representa o identificador do tipo de veículo, sua origem e seu destino. O processo de entrada pega o primeiro elemento da lista e gera o veículo. Se o tamanho da lista for maior que um valor definido, o Aimsun Next emite uma mensagem de aviso.
An example of a virtual queue for one entrance section could be: ------- ------- -------- ------- -------- -------- -------- ------ Car Car Bus Taxi Car Truck Car ... From 1 From 1 From 4 From 1 From 1 From 1 From 1 ... To 2 To 3 To 2 To 2 To 2 To 2 To 3 ... -
Modelo de geração de tráfego- ASAP: Não há fila virtual de entrada, pois os veículos são gerados na simulação assim que houver espaço para eles.
Modelos comportamentais¶
Durante sua viagem pela rede, os veículos são atualizados de acordo com modelos de comportamento veicular: "Car-Following" e "Lane-Changing". Os condutores tendem a trafegar na velocidade desejada em cada seção, mas o ambiente (ou seja, o veículo precedente, veículos adjacentes, semáforos, sinalização, bloqueios etc.) condicionará seu comportamento.
O tempo de simulação é dividido em pequenos intervalos de tempo chamados ciclos de simulação ou passos de simulação (t). Esse valor pode ser definido dentro do intervalo (0,1 ≤ t ≤ 1,5 segundos). A cada ciclo de simulação, a posição e a velocidade de cada veículo na rede são atualizadas de acordo com o seguinte algoritmo:
if (necessary to change lanes) then
Apply Lane-Changing Model
endif
Apply Car-Following Model
Depois que todos os veículos forem atualizados para o ciclo atual, os veículos programados para chegar durante este ciclo são introduzidos no sistema e os próximos horários de chegada dos veículos são gerados.
Modelo de Seguimento Veicular¶
Primeiro, alguns termos são definidos na teoria do fluxo de tráfego para descrever as posições relativas dos veículos medidas em tempo e distância.
- Headway: O tempo entre o para-choque dianteiro de um veículo e o para-choque dianteiro do veículo seguinte
- Gap: O tempo entre o para-choque traseiro de um veículo e o para-choque dianteiro do veículo seguinte
- Espaçamento: o espaço entre o para-choque dianteiro de um veículo e o para-choque dianteiro do veículo seguinte
- Clearance: O espaço entre o para-choque traseiro de um veículo e o para-choque dianteiro do veículo seguinte
Estes serão usados na descrição a seguir do comportamento dos veículos
O modelo de car-following implementado no Aimsun Next é baseado no modelo Gipps (Gipps 1981 e 1986b). Ele foi desenvolvido incluindo parâmetros de modelo que não são globais, mas determinados pela influência de parâmetros locais dependendo do "tipo de motorista" (aceitação do limite de velocidade do veículo), da geometria da seção (limite de velocidade na seção, limites de velocidade em movimentos de conversão etc.), da influência de veículos nas faixas adjacentes etc.
Ele consiste em dois componentes, aceleração e desaceleração. O primeiro representa a intenção de um veículo de atingir uma determinada velocidade desejada, enquanto o segundo reproduz as limitações impostas pelo veículo precedente ao tentar dirigir na velocidade desejada. Este modelo estabelece que a velocidade máxima à qual um veículo (n) pode acelerar durante um período de tempo (t, t+dt) é dada por:
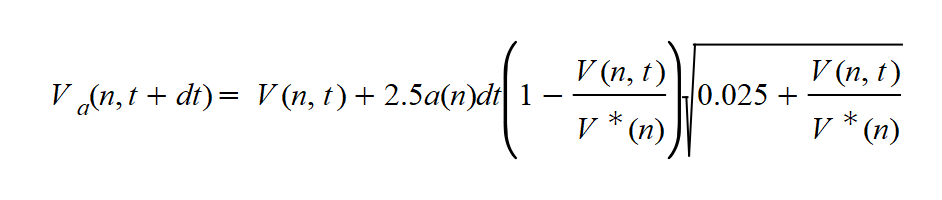
em que:
- \(V_a(n,t)\) é a velocidade do veículo n no tempo t;
- \(V*(n)\) é a velocidade desejada do veículo (n) para a seção atual;
- \(a(n)\) é a aceleração máxima para o veículo n;
- \(dt\) é o ciclo de simulação;
Ao mesmo tempo, a velocidade máxima que o mesmo veículo \((n)\) pode alcançar durante o mesmo intervalo de tempo \((t, t+dt)\), de acordo com suas próprias características e as limitações impostas pela presença do veículo líder (veículo \(n-1\)) is:

em que:
- \(d(n)\) (< 0) é a desaceleração normal do veículo n;
- \(x(n,t)\) é a posição do veículo n no tempo t;
- \(x(n-1,t)\) é a posição do veículo precedente (n-1) no tempo t;
- \(s(n-1)\) é o comprimento efetivo do veículo (n-1);
- \(d'(n-1)\) é uma estimativa da desaceleração normal do veículo (n-1);
- \(T\) é o tempo de reação.
A velocidade do veículo n durante o intervalo de tempo \((t, t+dt)\) é então o mínimo dessas duas velocidades

A posição do veículo n na faixa atual é então atualizada usando a integração da velocidade. As fases de aceleração e desaceleração são integradas usando métodos diferentes. A fase de aceleração é integrada usando o método do retângulo correspondente à seguinte equação:
enquanto a integração da fase de desaceleração usa o método do trapézio seguindo esta equação:

A estimativa da desaceleração do líder é uma função de Fator de sensibilidade parâmetro α definido por tipo de veículo. O modelo é então:

Quando α é < 1, o veículo subestima a desaceleração do líder e, como consequência, torna-se mais agressivo, diminuindo o espaçamento à sua frente.
Quando α é maior que 1, o veículo superestima a desaceleração do líder e, como consequência, torna-se mais cauteloso, aumentando o espaçamento à sua frente.
O modelo também inclui o headway mínimo entre líder e seguidor como uma restrição do componente de desaceleração. Esta restrição é aplicada antes de atualizar a posição X(n,t+T).
O restrição de headway mínimo é definido como:
Se

então
em que:
- x(n,t) é a posição do veículo n no tempo t;
- x(n-1,t) é a posição do veículo precedente (n-1) no tempo t;
- MinHW(n) é o headway mínimo do veículo (n) entre ele e o veículo (n+1).
Observe que o headway é usado nesta fórmula. Anteriormente, o gap era usado, e isso foi corrigido aqui.
Modelo Modificado para Rodovias Congestionadas¶
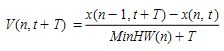
A velocidade prevista pelo modelo de car-following de Gipps em alta densidade não corresponde às velocidades observadas em condições congestionadas em rodovias. Um modelo modificado é usado para ajustar a dependência da velocidade em função da densidade. Isso é obtido alterando a dependência da distância interveicular (Clearance) em função da velocidade, que é simplesmente linear no modelo de Gipps.
A equação de Gipps para a folga entre veículos é:

que é transformado em:

e

Em velocidade constante e desaceleração máxima, isto se simplifica para:

O efeito sobre o clearance e o fluxo é mostrado abaixo.
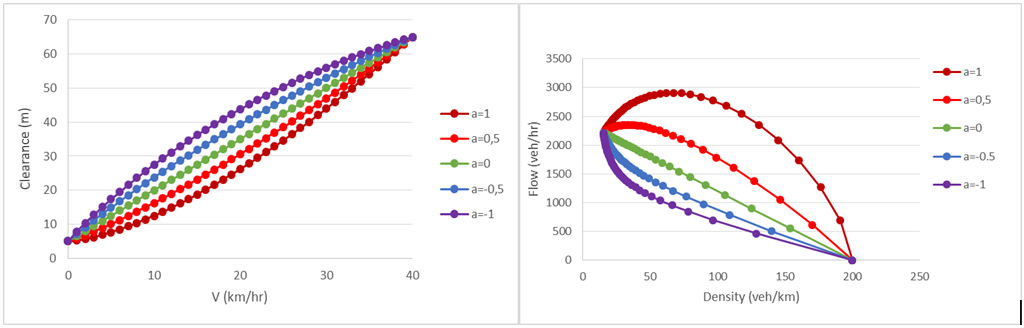
Isto foi testado em uma rede na qual a densidade de tráfego foi aumentada até o ponto em que se observou colapso do fluxo.
O a o intervalo do parâmetro é definido pelo tipo de veículo e cada carro, quando gerado, recebe um valor para a que ele mantém enquanto está na simulação. Como efeito de a é diferente na aceleração e na desaceleração, há uma opção para usar +a em aceleração e -a em desaceleração. Portanto, se a é positivo, o espaçamento entre veículos será maior durante a aceleração do que durante a desaceleração para a mesma velocidade.
Calculando a velocidade de um veículo em uma seção¶
O modelo de car-following é tal que um veículo líder, isto é, um veículo trafegando livremente, sem nenhum veículo afetando seu comportamento, tentaria trafegar em sua velocidade máxima desejada. Três parâmetros são usados para calcular a velocidade máxima desejada de um veículo ao trafegar em uma determinada seção ou movimento de conversão; dois são relacionados ao veículo e um à seção ou ao movimento de conversão:
- Velocidade máxima desejada do veículo \(i\): \(v_{max}(i)\)
- Aceitação do limite de velocidade do veículo \(i\): θ\((i)\)
- Limite de velocidade da seção ou movimento de conversão \(s\): \(S_{limit}(s)\)
O limite de velocidade para um veículo iem uma seção ou movimento de conversão s, é calculado como:

A velocidade máxima desejada do veículo i em uma seção ou movimento de conversão s, é calculado como:

Essa velocidade máxima desejada \(V_{max}(i,s)\) é o mesmo referido acima, no modelo de car-following de Gipps, como V*(n)
O Modelo de Car-Following em Duas Faixas¶
O Modelo de Car-Following em Duas Faixas: Absoluto¶
O objetivo do modelo de seguimento veicular de duas faixas é incluir a influência dos veículos nas faixas adjacentes no modelo de seguimento veicular. Quando um veículo está trafegando ao longo de uma seção, o modelo considera a influência de um número especificado de veículos (Número de veículos) trafegando mais lentamente na faixa adjacente à direita (ou na faixa à esquerda, quando se dirige pela esquerda), pode ter sobre o veículo. O modelo então determina uma nova velocidade desejada máxima de um veículo nesta seção, que será usada no modelo de car-following.
Os parâmetros do Two-Lane Car Following Model são definidos na Editor de Experimento: Guia Comportamento e a correspondência entre faixas é determinada por sua seção comum ou pode ser determinada por meio de subcaminhos adjacentes conforme descrito abaixo.
O modelo primeiro calcula a velocidade média para Número de veículos dirigindo a jusante do veículo na faixa adjacente mais lenta (MeanSpeedVehiclesDown). Apenas veículos dentro de uma determinada distância (Distância máxima) do veículo atual são levados em consideração (veja a Figura abaixo). Se menos de Número de veículos estão envolvidos, a velocidade desejada do veículo atual na seção é usada para adicionar veículos para completar Número de veículos valores para obter uma média mais significativa.

Há dois casos: 1) a faixa adjacente é uma rampa de entrada e 2) a faixa adjacente é qualquer outro tipo de faixa. Além de Número de veículos eDistância máxima parâmetros, mais dois parâmetros são definidos:Diferença Máxima de Velocidade e Diferença Máxima de Velocidade na Rampa de Entrada. Então, a velocidade desejada final de um veículo em uma seção é calculada da seguinte forma:
if (the adjacent slower lane is an On-ramp) {
MaximumSpeed = *MeanSpeedVehiclesDown* + *MaximumSpeedDifferenceOnRamp*
} else {
MaximumSpeed = *MeanSpeedVehiclesDown* + *MaximumSpeedDifference*
}

Este procedimento garante que as diferenças de velocidades entre duas faixas adjacentes sejam menores ou iguais a Diferença Máxima de Velocidade ou Diferença Máxima de Velocidade na Rampa de Entrada, respectivamente.
Observe que, quando a faixa atual do veículo ou sua faixa adjacente estiverem reservadas e definidas para não serem consideradas no Two-lane Car-following Model, então o modelo não é aplicado.
Exemplo¶
O exemplo a seguir destina-se a esclarecer a influência do Número de veículos parâmetro. Suponha que Número de veículos = 4 e Distância máxima = 100m. Isso significa que um veículo observa os primeiros 4 carros à sua frente na faixa adjacente que estão localizados nos próximos 100 metros a partir de sua posição e calcula a velocidade média deles. Se houver apenas 2 carros nesta seção de 100 metros, somente a velocidade desses carros será considerada e, para obter a velocidade média de 4 veículos, 2 carros 'dummy' adicionais com velocidade de fluxo livre serão incluídos.
Por exemplo, suponha que nos próximos 100 metros haja uma rampa de entrada com 1 veículo parado e 1 veículo em movimento a 40 km/h, e que o limite de velocidade da seção seja 60 km/h. A velocidade média considerada no seguimento veicular em duas faixas seria:
(0 + 40 + 60 + 60)/4 = 40 km/h.
Se a diferença máxima de velocidade nas rampas de entrada for 50 km/h, isso significaria que os veículos na faixa principal aceitariam trafegar a 50 + 40 = 90 km/h.
Se, no entanto, houvesse 4 carros ou mais parados na rampa, a velocidade média seria 0 km/h, e isso significaria que os veículos na faixa principal aceitariam trafegar a 50 + 0 = 50 km/h. Se houver carros em movimento a mais de 100 metros de distância, eles não afetariam o veículo até que ele se aproximasse deles, quando passaria a incluí-los progressivamente nos cálculos.
O Modelo de Car-Following em Duas Faixas: Relativo¶
Este modelo pressupõe que um veículo circulando em uma faixa rápida reduzirá a velocidade na presença de veículos lentos em uma faixa adjacente para antecipar que um veículo lento possa sair à sua frente.
Considerando que os veículos rápidos estão trafegando no limite de velocidade e os veículos lentos no limite de velocidade menos a diferença de velocidade, o modelo calcula quantos dos próximos veículos lentos em um pelotão homogêneo poderiam ser assumidos pelo veículo mais rápido como não propensos a mudar de faixa.
A velocidade máxima do veículo mais rápido é então calculada usando o modelo usual de Car-Following, de modo a evitar colisão com o próximo veículo lento não confiável se ele viesse a mudar de faixa.
O espaçamento seguro entre os dois veículos é definido como:

em que \(v_1\) e \(v_2\) são as velocidades dos veículos, \(b\) é a desaceleração, \(RT\) o tempo de reação e L o comprimento do veículo líder.
Exemplo¶
Por exemplo, se o limite de velocidade da via for 120 km/h e a diferença de velocidade usada no modelo de duas faixas for dada como 40 km/h:
-
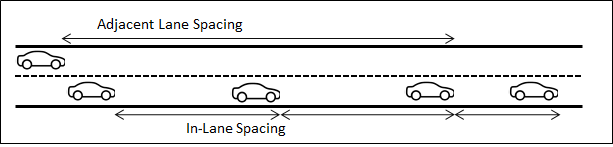
O espaço seguro necessário para evitar colisão entre um veículo trafegando a \(V_2\)=120 km/h e um veículo trafegando a \(V_1\)=80 km/h (limite de velocidade da via menos a diferença de velocidade) é 132,16 metros, onde b=4 m/s\2, RT=1s e L =5m. Isso é representado como "Adjacent Lane Spacing" na imagem abaixo:
-
O espaçamento na faixa entre dois veículos de uma fila homogênea (interpretado como \(V_1\)=\(V_2\) e usando a mesma desaceleração) viajando a \(V_1\)=80 km/h is 38.33 m
-
O número de veículos lentos (NSV) correspondente ao intervalo de segurança entre veículos rápidos e lentos é NSV= 132.16/38.33=3.44.
Se a velocidade média nas faixas mais lentas tiver sido efetivamente medida como 60 km/h na simulação, então, para calcular o limite de velocidade efetivo na faixa mais rápida:
- A distância usando a fórmula de espaçamento seguro entre veículos lentos, considerando \(V_1\)= \(V_2\) = 60 Km/h is 30m
- O espaçamento seguro para os veículos mais rápidos, usando o NSV calculado anteriormente, é 30*3.44 = 103,42 metros. Essa distância é usada para calcular \(V_2\) usando a fórmula de espaçamento seguro entre veículos rápidos e lentos e considerando \(V_1\)= 60km/h. \(V_2\) = 97,86 km/h
Este valor de \(V_2\) é então o limite de velocidade da faixa rápida, modificado pelo modelo para levar em conta o tráfego adjacente mais lento.
O Modelo de Car-Following em Duas Faixas: Caminhos Adjacentes ¶
Em alguns casos, faixas adjacentes podem ser modeladas em seções viárias separadas, e os veículos ajustarão a velocidade para convergir quando as seções convergirem, mas enquanto ainda estiverem separadas. Nesse caso, a adjacência é determinada não observando transversalmente as faixas na mesma seção viária, mas observando transversalmente subcaminhos definido nas seções adjacentes.
Neste caso, se dois subcaminhos começarem e terminarem nos mesmos nós, isto é, forem faixas adjacentes modeladas como seções separadas, então eles podem ser vinculados no editor de subcaminho e o mesmo modelo de car-following de duas faixas, baseado na distância ao longo do subcaminho para determinar a adjacência, será usado.
car-following com Adaptive Cruise Control (ACC) e Cooperative Adaptive Cruise Control (CACC) ¶
É possível usar um módulo ACC/CACC que utiliza diferentes modelos para calcular a aceleração de um veículo dependendo das escolhas do controlador de cruzeiro.
Observe que, embora o tempo de reação do tipo de veículo deva permanecer no valor de tempo de reação humano (isto é, 0.8s), o controlador ACC/CACC foi implementado para funcionar nos passos de simulação de veículos autônomos (0.1s). Por um lado, então, o passo de simulação do experimento no aba Tempo de Reação deve ser alterado para 0.1 para ver os efeitos dos modelos ACC/CACC na simulação. Por outro lado, as configurações de Tempo de Reação devem ser definidas como Variável (Diferente para Cada Tipo de Veículo), de modo que o tempo de reação dos veículos não seja igual ao passo de simulação.
Módulos ACC/CACC¶
-
Modo de Regulação de Velocidade: umsv=k1*(vf-vsv)
em que:
- asv: aceleração recomendada pelo controlador ACC para o veículo sujeito (m/s2).
- k1: ganho na diferença de velocidade entre a velocidade de fluxo livre e a velocidade atual do veículo em questão (s−1). Corresponde ao parâmetro chamado Ganho de Velocidade em Fluxo Livre ligado aba ACC do editor de tipo de veículo.
- vf: velocidade de fluxo livre (m/s).
- vsv: velocidade atual do veículo sujeito (m/s).
-
Modo ACC Gap Regulation: umsv=k2(d-thw vsv-L)+k3(vl-vsv )
em que:
- asv: aceleração recomendada pelo controlador ACC para o veículo sujeito (m/s2).
- k2: ganho na diferença de posição entre o veículo precedente e o veículo sujeito (s−2). Corresponde ao parâmetro chamado Ganho de Distância no aba ACC do editor de tipo de veículo.
- k3: ganho na diferença de velocidade entre o veículo precedente e o veículo em questão (s−1). Corresponde ao parâmetro chamado Ganho de Velocidade em Seguimento ligado aba ACC do editor de tipo de veículo.
- d: distância entre o para-choque dianteiro do veículo em questão e o para-choque dianteiro do veículo precedente (m).
- thw: intervalo de tempo desejado do controlador ACC (s). Corresponde à distribuição chamada Intervalo de Tempo Desejado no aba ACC do editor de tipo de veículo.
- vsv: velocidade atual do veículo sujeito (m/s).
- L: comprimento do veículo precedente (m).
- vl: velocidade atual do veículo precedente (m/s).
-
Modo de Regulação de Espaçamento CACC:
- Aceleração: asv(t)=(vsv(t)-vsv(t- ∆t))/∆t
- Velocidade atual: vsv(t)=vsv(t- ∆t)+ kpek (t)+kde'k (t)
- Erro de intervalo de tempo: ek(t)=d(t- ∆t)-tg* vsv(t- ∆t)-L
- Erro de velocidade: e'k(t)=vl (t- ∆t)- vsv(t- ∆t)-tg* asv (t- ∆t)
em que:
- asv: aceleração recomendada pelo controlador ACC para o veículo sujeito (m/s2).
- vsv: velocidade atual do veículo sujeito (m/s).
- Δt: passo de tempo para cada atualização (s).
- kp e kd: ganhos para ajustar o intervalo de tempo entre o veículo sujeito e o veículo precedente (kp em s−1 e kd não têm unidades). kp corresponde ao parâmetro chamado Ganho de Distância no aba CACC do editor de tipo de veículo e kd corresponde ao parâmetro chamado Ganho de velocidade no aba CACC do editor de tipo de veículo.
- ek: erro de intervalo de tempo.
- tg: é o intervalo de tempo constante entre o último veículo da sequência CACC precedente e o veículo em questão (s). Corresponde ao parâmetro chamado either Intervalo de Tempo para o Líder ou Seguidor de intervalo de tempo no aba CACC do editor de tipo de veículo, dependendo do estado do pelotão do veículo.
- L: comprimento do veículo precedente.
- vl: velocidade atual do veículo precedente (m/s).
- d: distância entre o para-choque dianteiro do veículo em questão e o para-choque dianteiro do veículo precedente (m).
Veículos ACC/CACC¶
Os tipos de veículo podem ser equipados com um módulo ACC ou CACC (ou não serem equipados).
Ambos os módulos podem executar o Speed Regulation Mode, que normalmente é usado quando não há nenhum veículo à frente do veículo atual (ou se o veículo à frente está muito distante).
Os módulos ACC usam o modo ACC Gap Regulation para controlar o movimento do veículo com base no veículo à frente, se houver.
Os módulos CACC usam o modo CACC Gap Regulation em vez disso.
A distribuição de veículos não equipados, veículos equipados com ACC e veículos equipados com CACC é definida em cada editor de tipo de veículo.
Sempre que um veículo estiver equipado com um módulo ACC ou CACC, ele só será funcional em vias cujos o tipo de via permite isso.
Pelotonamento CACC¶
Os veículos equipados com o módulo CACC podem formar pelotões, que são grupos de veículos conectados consecutivos que podem ter intervalos de tempo menores que o normal entre si. Isso se deve à troca rápida e confiável de informações de um veículo para outro.
O platooning é realizado pela implementação de duas variantes do modo Gap Regulation: Follower e Leader. Essas variantes diferem no Time Gap usado na fórmula.
Um Seguidor é um veículo que pertence a um pelotão e não é o primeiro veículo desse pelotão.
Um Líder é qualquer veículo conectado que não seja um Seguidor.
Os pelotões têm um tamanho máximo. Se um veículo tentar entrar em um pelotão que está cheio, ele se tornará o líder de seu próprio pelotão. Consulte o editor de tipo de via para especificar as configurações de tamanho do pelotão de veículos CACC.
Assunção de Controle de Emergência ACC/CACC¶
O modelo ACC/CACC inclui o algoritmo de alerta de colisão frontal CAMP conforme mostrado no artigo Uso de Cooperative Adaptive Cruise Control (CACC) para Formar Fluxos de Veículos de Alto Desempenho nas páginas 22 e 23.
Isso permite que os veículos mudem de qualquer modo de condução ACC/CACC para Disabled se o algoritmo mostrar uma colisão potencial que não será evitada pelo controlador.
Se, em qualquer momento, o carro passar para condução manual, também chamada de desativada, devido a este algoritmo, então há um tempo de espera de 20s para que ele possa entrar novamente nos modos de condução ACC/CACC. Isso representa um tempo médio para que um condutor cuide da situação e julgue seguro o suficiente retornar aos modos de condução automática.
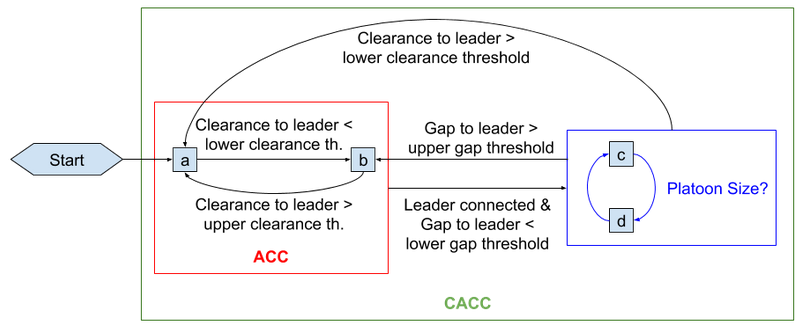
Gráfico de decisão ACC/CACC¶
Os veículos de simulação têm uma coluna dinâmica chamada ‘Cruise Control Status’ para mostrar qual modo de condução foi usado no último passo de simulação. Os cinco valores possíveis são:
a. Regulação de Velocidade CC b. Regulação de Espaçamento ACC c. Regulação de Espaçamento do Líder de Pelotão CACC d. Regulação de Espaçamento do Seguidor de Pelotão CACC e. Desativado
O fluxograma de decisão para aplicar um dos quatro primeiros modos acima é:
Modelo de Mudança de Faixa¶
O modelo de mudança de faixa também pode ser considerado um desenvolvimento do modelo de mudança de faixa de Gipps (Gipps 1986a e 1986b). A mudança de faixa é modelada como um processo de decisão, analisando a necessidade da mudança de faixa (como para manobras de conversão determinadas pela rota), a desejabilidade da mudança de faixa (para atingir a velocidade desejada quando o veículo líder está mais lento, por exemplo) e a viabilidade da mudança de faixa dependendo da posição do veículo na rede viária em relação à geometria das faixas e aos veículos adjacentes.
Os parâmetros globais que controlam o modelo de mudança de faixa são definidos no Editor de Experimento: Guia Comportamento.
O modelo de mudança de faixa é um modelo de decisão que aproxima o comportamento do motorista da seguinte forma em cada atualização do veículo:
-
É necessário mudar de faixa? Isto depende de vários fatores: as opções de conversão a partir da faixa atual, a distância até o próximo movimento de conversão e as condições de tráfego na faixa atual, descritas pela velocidade e pelos comprimentos de fila.
-
É desejável mudar de faixa? Isso depende de haver alguma melhoria nas condições de tráfego para o motorista como resultado da mudança de faixa. Essa melhoria é medida em termos de velocidade e distância. Se a velocidade na faixa-alvo for maior em comparação com a faixa atual, ou se a fila for mais curta por uma margem suficiente, então é desejável mudar de faixa.
-
É possível mudar de faixa? Isso requer que haja uma lacuna adequada para realizar a mudança de faixa. Isto calcula tanto a frenagem imposta pelo futuro veículo a jusante ao veículo que muda de faixa quanto a frenagem imposta pelo veículo que muda de faixa ao futuro veículo a montante. Se ambos os níveis de frenagem forem aceitáveis, então a mudança de faixa é possível.
Para representar o comportamento do motorista no processo decisório de mudança de faixa, são consideradas três zonas diferentes, cada uma correspondente a uma motivação diferente para mudança de faixa.
-
Zona 1: As decisões de mudança de faixa são governadas principalmente pelas condições de tráfego das faixas envolvidas. Para medir a melhoria que o motorista obterá ao mudar de faixa, vários parâmetros são considerados: a velocidade desejada do motorista, a velocidade e a distância do veículo precedente atual, a velocidade e a distância do futuro veículo precedente na faixa de destino. O modelo implementado nesta zona é o modelo de manobra de ultrapassagem.
-
Zona 2: Esta é a zona intermediária. Veículos que trafegam na faixa "errada" (isto é, faixas a partir das quais o movimento de conversão desejado não pode ser feito) tendem a se aproximar do lado correto da via a partir do qual a conversão é permitida. Veículos que procuram uma brecha tentam adaptar sua velocidade para encontrar brechas localizadas a jusante ou adjacentes a eles.
-
Zona 3: Os veículos estão tentando alcançar urgentemente sua faixa válida, procurando brechas a montante e reduzindo a velocidade se necessário, até mesmo parando completamente para possibilitar a mudança de faixa.
A mudança de faixa de cada veículo i na seção s tem cinco aspectos:
- Cálculo da distância da zona de mudança de faixa
- cálculo de Faixas-Alvo
- Comportamento do veículo considerando as faixas-alvo
- Modelo de Aceitação de Brechas para Mudança de Faixa
- Intervalo Alvo e Cooperação
Cálculo da distância da zona de mudança de faixa¶
As zonas de mudança de faixa são delimitadas por dois parâmetros, o Look-Ahead e o Critical Look-Ahead. O look-ahead é a distância a montante até o ponto em que o veículo fica ciente de suas faixas-alvo (início da zona de mudança de faixa 2), e o critical look-ahead é a distância a montante até o início da zona de mudança de faixa 3.
Estes parâmetros são definidos em distância (metros ou pés), por padrão, ou em tempo (segundos), dependendo do preferências do usuário. Quando esses parâmetros são definidos no tempo, a conversão para distância física é calculada como:
em que:
- \(D_m\): Distância em metros
- \(D_s\): Distância em segundos
- \(S_{limit}(s)\): Limite de velocidade da seção s.
A percepção do Look-Ahead e do Critical Look-Ahead para cada veículo é variada usando o Fatores Mínimo e Máximo de Antecipação do veículo. Por exemplo, se uma distância de antecipação for definida como 200 metros, o Minimum Look-Ahead Factor for 0.9 e o Maximum Look-Ahead Factor for 1.2, então a percepção da distância será de 180 (calculado como 0.9 x 200) a 240 (calculado como 1.2 x 200) metros. Todos os veículos selecionam sua distância no intervalo 180-240 usando uma distribuição aleatória uniforme.
cálculo de Faixas-Alvo¶
O processo de mudança de faixa começa calculando o faixas-alvo válidas. A saída deste processo é um conjunto de faixas válidas para a zona 3 e um conjunto de faixas válidas para a zona 2.
Comportamento do veículo considerando as faixas-alvo¶
A estratégia é que cada veículo tente alcançar o conjunto de faixas de destino definido pelas zonas 2 e 3, e o comportamento do veículo é o seguinte:
-
Se a faixa atual do veículo não estiver dentro do subconjunto de faixas válidas determinado pela Zone 3, o comportamento do veículo será determinado pela Zone 3.
-
Se a faixa atual do veículo estiver dentro do subconjunto de faixas válidas determinado pela Zone 3, mas fora do subconjunto de faixas válidas determinado pela Zone 2, o comportamento do veículo será determinado pela Zone 2.
-
Se a faixa atual do veículo estiver dentro dos subconjuntos de faixas válidas tanto da Zone 3 quanto da 2, o comportamento do veículo é determinado pela Zone 1.
Quando a faixa atual de um veículo está em uma faixa válida determinada pelas zonas 2 e 3, em geral o comportamento é modelado como se estivesse na zona 1, ou seja, manobras de ultrapassagem podem ser iniciadas. Há uma exceção quando o líder de um veículo é afetado por um obstáculo (movimento de conversão, incidente, fechamento de faixa etc.) que está mais próximo do que o obstáculo do próprio veículo; então, a avaliação para ultrapassar o líder inclui o uso de uma faixa que pode estar fora do subconjunto de faixas dado pela Zone 2.
Modelo de Aceitação de Brechas para Mudança de Faixa ¶
O modelo de aceitação de brechas é consistente com o modelo de car-following, para evitar situações artificiais de interrupção do fluxo:


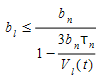
O modelo de seguimento veicular de Gipps é estável, isto é, não requer desacelerações acima da desaceleração máxima desejada α\(b_n\) em que \(b_n\) é uma estimativa da desaceleração desejada do veículo líder.

Isto é alcançado quando:

O modelo de car-following de Gipps evita colisões quando o Gap permanece positivo durante todo o processo de desaceleração. Isso fornece uma restrição adicional:

Esta condição deve ser atendida para aplicar o modelo de seguimento veicular de Gipps com um novo líder quando um veículo muda de faixa (ou seja, seleção de possível líder e aceitação de brecha).
Além disso, aplicar esta restrição ao final do processo de desaceleração, isto é, quando

resulta em:
se o veículo mudar de faixa, a velocidade e a posição dos veículos no tempo t+dt é avaliado:
- Para os veículos que já estão atualizados, a velocidade e a posição atuais são usadas.
- Para os demais, a velocidade e a posição assumindo que o veículo muda de faixa no instante t+dt é avaliado.
O intervalo é aceitável se as grandezas físicas no tempo t+dt atende aos três requisitos a seguir:
- as lacunas são positivas
- as velocidades calculadas são positivas,
- as desacelerações impostas são menores que α MaxDesiredDecel
Usando as equações anteriores, isso pode ser obtido com uma condição no tempo t que precisam ser atendidas tanto para as brechas a montante quanto a jusante.

e

A aceitação da brecha no modelo de mudança de faixa pode ser modificada definindo os seguintes parâmetros no Editor de Seção: Aba Modelos Dinâmicos:
- Agressividade: Este parâmetro permite que os veículos entrem em gaps menores sem forçar o veículo de trás a frear, seguido por um processo de relaxamento para recuperar gradualmente a estabilidade dos modelos de car-following. A agressividade % controla a sensibilidade de um veículo à desaceleração do líder, determinando quão curtos esses gaps podem ser. Ou seja, se a agressividade for definida como 100% (o que não deve ser usado, pois é o caso mais extremo), isso significa sensibilidade zero, e o novo gap permitido (em todas as situações de velocidade) seria aquele necessário em uma situação de parada (como se o veículo estivesse estacionando). Com agressividade 0%, é usado o gap completo conforme descrito acima, sem alteração na sensibilidade. Todos os valores intermediários tornarão o gap menor de acordo com a agressividade % e também com a velocidade atual do líder. A agressividade se aplica a todas as manobras de mudança de faixa que não são cooperativas. Este parâmetro pode ser definido para um Tipo de Via ou pode ser ajustado por Tipo de Veículo.
- Mudança de Faixa Imprudente: Esta opção determina se os veículos podem entrar em lacunas que não garantem a estabilidade do seguimento veicular. O veículo que muda de faixa, ou seu seguidor, pode precisar frear até duas vezes a sua desaceleração máxima. Somente veículos cujo tipo de veículo também tenha 'Imprudent lane changing' ativado aceitarão essas lacunas.
Intervalo Alvo e Cooperação¶
Para mudar de faixa, a faixa de destino é pesquisada em busca de um intervalo adequado. O veículo a montante do intervalo deve ser capaz de seguir o veículo que está procurando um intervalo usando o modelo de seguimento veicular livre de colisões ou estar disposto a cooperar. O veículo em questão que pretende mudar de faixa então se adaptará progressivamente à velocidade do veículo a jusante usando o modelo de seguimento veicular de dois líderes com um intervalo negativo, se necessário. Ao escolher um intervalo adjacente ou para trás, o veículo que pretende mudar de faixa sempre terá uma velocidade inferior à imposta pelo seu líder atual. Para evitar essa penalidade, o veículo em mudança de faixa pode, em vez disso, escolher um intervalo à frente se for capaz de ultrapassar o veículo a jusante antes do obstáculo iminente. Selecionar um intervalo à frente, no entanto, não fará com que ele exceda a velocidade de seguimento veicular de Gipps imposta pelo seu líder atual.
A porcentagem de veículos a montante que cooperam no modelo de mudança de faixa depende da seção e do tipo de veículo usando o Cooperação para Criar uma Lacuna porcentagem no Editor de Seções e caixa de seleção no Editor de Tipo de Veículo. Observe que os veículos a montante só cooperarão com veículos solicitantes que estejam nas Zonas 2 e 3; isto é, veículos para os quais a mudança de faixa é obrigatória.
A ordem de avaliação dos gaps em cada zona é:
- Zona 1
- 1st Intervalo adjacente
- Zona 2
- 1st Intervalo à frente
- 2nd Intervalo adjacente
- Zona 3
- 1st Intervalo adjacente
- 2nd Intervalo para trás
Avaliação do gap à frente:¶
Em uma avaliação de intervalo à frente, o veículo que planeja mudar de faixa avalia um intervalo na faixa adjacente, à frente de sua posição atual, o que exige que ele ultrapasse o veículo a jusante nessa faixa. Primeiro, assumindo que tanto o veículo a jusante quanto o veículo precedente mantenham seu comportamento atual, é estimado o tempo necessário para ultrapassar esse veículo a jusante (\(t_{overtake}\))
Dada a posição estimada do veículo sujeito e daquele que estará a montante dele nesse momento, o gap crítico entre os dois é avaliado e, se esse gap for aceitável, o gap à frente é selecionado como alvo.
A figura abaixo mostra o gap frontal desejado do veículo em questão no tempo t e a situação no tempo (\(t + t_{overtake}\)) quando avalia o intervalo entre ele e o veículo que estará a montante dele naquele momento. Além disso, o veículo que estará a montante do sujeito, se cooperar, modificará então seu car-following de car-following simples (linha contínua) com seu líder original para aplicar o modelo de car-following com dois líderes (linhas tracejadas), que inclui o veículo sujeito.
A mudança de faixa será feita em uma etapa futura da simulação se o gap à frente selecionado se tornar um gap adjacente que ainda seja aceitável.
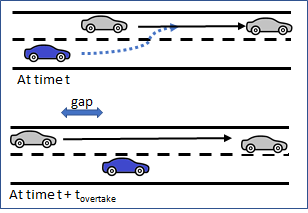
O intervalo à frente é verificado apenas na Zona 2.
Avaliação de Brecha Adjacente¶
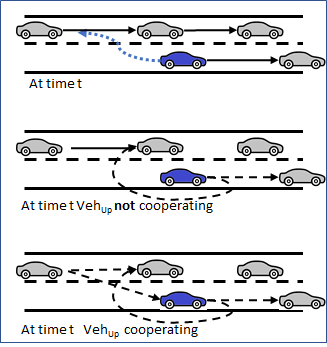
Em uma avaliação de brecha adjacente, o veículo sujeito que planeja mudar de faixa está situado entre dois veículos em sua faixa de destino e deve avaliar as brechas adjacentes a ele entre ambos os veículos a montante (\(Veh_{Up}\)) e veículo a jusante (-\(Veh_{Dn}\)) Isso é feito usando o algoritmo de acompanhamento veicular de Gipps.

A figura abaixo mostra as relações entre os veículos em uma avaliação de gap adjacente. No tempo t, o veículo sujeito e \(Veh_{Up}\) estão usando car following simples em suas respectivas faixas (linhas contínuas). Se ambas as brechas forem aceitáveis, ou se o veículo a montante estiver disposto a cooperar, a brecha adjacente é selecionada e o veículo sujeito aplica o modelo de car-following de dois líderes, conforme mostrado pelas linhas tracejadas. O veículo a montante aplica o modelo de car-following de dois líderes quando a brecha é selecionada, se ele cooperar, ou quando a manobra de mudança de faixa começa, se ele não cooperar.
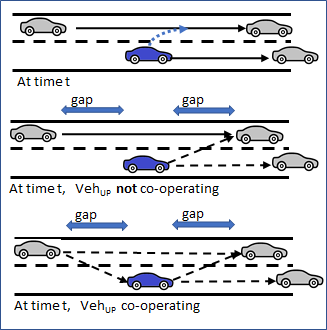
A brecha adjacente é verificada em todas as zonas.
Quando uma brecha adjacente é selecionada, o veículo sujeito inicia uma manobra de mudança de faixa quando tanto a brecha com \(Veh_{Up}\) e o intervalo com \(Veh_{Dn}\) são aceitáveis, ou seja, no passo de simulação após aquele em que o intervalo adjacente foi selecionado, se os intervalos já eram aceitáveis, ou quando a cooperação de \(Veh_{Up}\) tornou sua brecha aceitável.
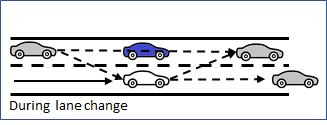
Na figura abaixo, o veículo azul é o sujeito. À medida que realiza sua mudança de faixa, sua representação na simulação é movida instantaneamente para a nova faixa, mas deixa um veículo sombra na faixa que acabou de deixar durante a duração da mudança de faixa, que depende da velocidade. Isso fornece um veículo a seguir em ambas as faixas durante o tempo em que o veículo sujeito ocupa duas faixas.
Avaliação da brecha a montante¶
Em uma avaliação de brecha para trás, o veículo que planeja mudar de faixa avalia uma brecha na faixa adjacente, atrás de sua posição atual, o que exige que reduza sua velocidade até ficar atrás de um veículo a montante nessa faixa. O futuro seguidor é selecionado tomando-se o veículo a montante mais próximo na faixa-alvo que seria capaz de realizar o seguimento veicular em relação ao veículo em questão. O veículo em questão aplica o modelo de seguimento veicular de dois líderes com o líder atual do futuro seguidor. Se o futuro seguidor cooperar, ele também aplica o modelo de seguimento veicular de dois líderes com o veículo em questão.
O gap posterior é verificado na zona 3.
Seguimento Veicular com Dois Líderes¶
Este modelo é aplicado quando um veículo está adaptando sua velocidade a um segundo líder. As situações possíveis são:
- Se ambos os líderes estiverem a jusante e mais distantes do que o intervalo crítico, o veículo segue o líder mais restritivo.
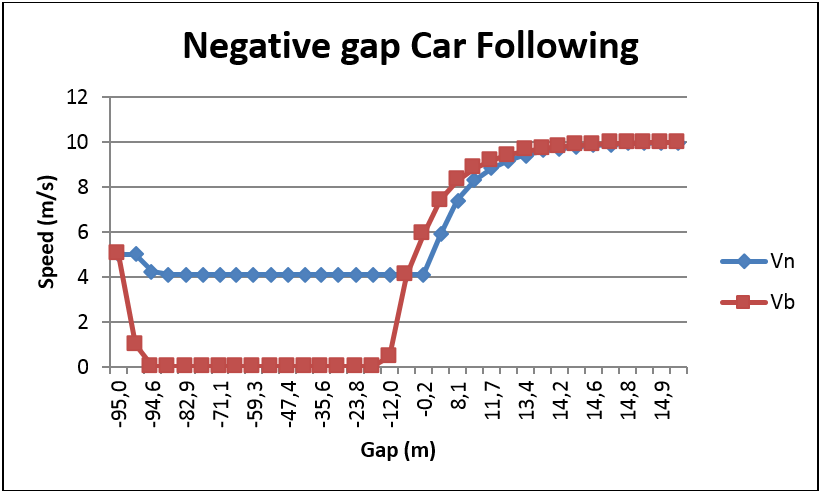
- Se um dos líderes estiver a montante (como em uma avaliação de gap para trás) ou mais próximo do que o gap crítico, a desaceleração derivada por Gipps impõe uma velocidade que diminui acentuadamente até zero. Para evitar esse comportamento, restringimos a velocidade de desaceleração do seguidor com:

Isso garante a continuidade da velocidade quando o líder a montante passa pelo veículo. A Adaptation Distance especifica o ponto em que isso deve ocorrer. Na comparação abaixo, a implementação padrão de Gipps é apresentada em vermelho e a implementação de gap negativo em azul.
Manobra de Ultrapassagem¶
Uma manobra de ultrapassagem ocorre na Zona 1 quando o veículo está em seu conjunto de faixas válidas e muda de faixa para passar outro veículo. Para promover ou desencorajar ultrapassagens, há dois parâmetros:
-
Limite de velocidade para ultrapassagem é a porcentagem da velocidade desejada de um veículo abaixo da qual o veículo pode decidir ultrapassar. Isso significa que sempre que um veículo é obrigado a trafegar mais devagar do que Limite de Velocidade de Ultrapassagem % de sua velocidade desejada, ele tentará ultrapassar. O valor padrão é 90%.
-
Limite de Velocidade de Recuperação de Faixa é a porcentagem da velocidade desejada de um veículo acima da qual o veículo decidirá retornar para a faixa adjacente mais lenta. O valor padrão é 95%.
Portanto, se um veículo com velocidade desejada de 100kph seguisse um veículo a uma velocidade < 90kph, ele tentaria ultrapassar. Posteriormente, quando atingisse uma velocidade > 95kph, retornaria à sua faixa original
Recomenda-se que o Limite de Velocidade de Recuperação de Faixa valor é maior que Limite de velocidade para ultrapassagem, caso contrário, algumas manobras de ultrapassagem podem ser abortadas assim que começam. Da mesma forma, se esses valores forem definidos como muito pequenos, os veículos não iniciarão uma manobra de ultrapassagem a menos que a diferença de velocidade seja muito grande, e retornariam à faixa mais lenta cedo demais.
Observe que a sensibilidade a esses parâmetros é baixa.
Esses dois parâmetros podem ser editados a partir do Janela de Tabelas para um Experimento Dinâmico, a partir dos atributos de um experimento ou podem ser definidos por tipo de veículo para substituir os parâmetros padrão do experimento.
Retornar à Faixa após Ultrapassagem¶
A tendência de retornar para a faixa mais lenta após a ultrapassagem é determinada pelo tipo de via, pela seção viária específica e pelo Permanência na Faixa de Ultrapassagem parâmetro para um tipo de veículo.
Se a seção viária permitir Retornar à Faixa Junto ao Meio-fio Após Ultrapassagem , definido pelo tipo de via ou modificado para a seção viária específica. Então, após cada manobra de mudança de faixa, um novo valor para o Manter Faixa Rápida O atributo Boolean do veículo é gerado com base no Permanência na Faixa de Ultrapassagem percentual para o tipo de veículo. Se esse valor for false, então o Limite de Velocidade de Recuperação de Faixa é ignorado e o veículo permanecerá na faixa que usou para ultrapassar.
Determinar o lado da manobra¶
O lado da via determina a manobra de ultrapassagem conforme:
- Quando um veículo tenta ultrapassar outro veículo, ele tentará fazê-lo usando a faixa adjacente à esquerda ao trafegar pelo lado direito, ou a faixa adjacente à direita ao trafegar pelo lado esquerdo.
- Quando um veículo está trafegando rápido o suficiente e deseja retornar para a faixa mais lenta, ele tentará ir para a faixa mais à direita ao trafegar pela direita e para a faixa mais à esquerda ao trafegar pela esquerda.
- Na presença de faixas reservadas opcionais (por exemplo, faixas HOV): Um veículo que entra em uma seção na qual uma ou mais faixas são opcionalmente reservadas para seu tipo de veículo considerará a faixa reservada mais próxima, mesmo que ela não seja adjacente à sua faixa atual, como uma alternativa para melhorar suas condições de tráfego. Se as condições de tráfego forem melhores na faixa reservada, o veículo tentará alcançá-la realizando uma mudança múltipla de faixas, se necessário, mas sem receber cooperação de outros veículos.
Modelo de Rampa de Entrada e Convergência ¶
Alguns modelos adicionais afetam o comportamento de mudança de faixa em alças de entrada e convergências para representar melhor os mecanismos de cooperação que ocorrem nesses locais. Os modelos de alça de entrada e de convergência são semelhantes, mas há algumas diferenças importantes indicadas abaixo.
Uma rampa de entrada é definida por uma faixa lateral na entrada da seção, enquanto uma convergência é definida por dois conectores faixa-a-faixa que terminam na mesma faixa em um nó marcado como convergência.
On-ramps podem ser usadas para modelar faixas de aceleração simples, enquanto merges permitem modelar geometrias mais complexas com múltiplas faixas de convergência, com e sem ilhas separadoras.

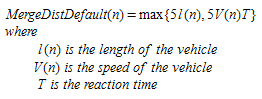
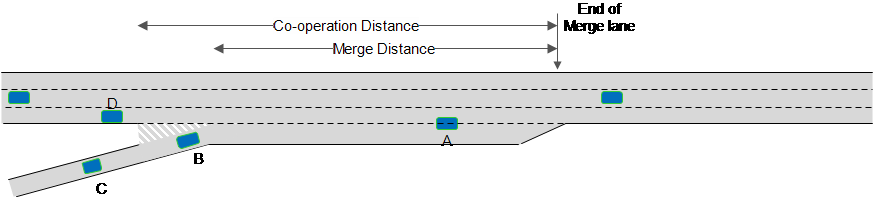
Nas rampas de entrada, os veículos na faixa lateral tentam sair da faixa dentro de uma Distância de Convergência antes do fim da faixa lateral. Reduzir a Distância de Mesclagem produz, portanto, o mesmo efeito que uma linha contínua ou uma ilha de separação na realidade. Seu valor Padrão é 5 vezes o máximo entre o comprimento do veículo ou 5 vezes a distância percorrida em 1 tempo de reação. Isso permite que o veículo inicie sua mesclagem antes que seja necessário desacelerar no fim da rampa:
Se O primeiro veículo a entrar é o primeiro veículo a sair estiver marcado, somente o primeiro veículo na rampa pode mudar de faixa para sair dela, enquanto, se não estiver marcado, todos os veículos na rampa podem tentar convergir. Esta configuração é usada para limitar a entrada de veículos sob congestionamento a um efeito zíper.
Nas rampas de entrada, os veículos que querem se incorporar e que estão dentro de Distância de Cooperação antes do fim da solicitação de cooperação de mudança lateral de faixa aos veículos que vêm pela via principal. Observe que a distância se propaga ao longo da rampa, e não ao longo da via principal; em outras palavras, ela não define onde os veículos na via principal começam a cooperar, mas onde os veículos na rampa começam a solicitar cooperação.
Os três parâmetros mencionados acima são definidos na Editor de Seção: Aba Modelos Dinâmicos, caixa Faixa Lateral.
Para esclarecer o efeito desses parâmetros em rampas de entrada, vamos analisar um exemplo:
- O veículo A está entrando na pista principal, pois está dentro da Distância de mesclagem
- O Veículo B ainda não está dentro do Distância de mesclagem e não sairá da rampa, mas está dentro do Distância de Cooperação e pode esperar que o veículo D permita que ele faça a mudança de faixa quando estiver dentro da distância de incorporação.
- O Veículo C ainda não está dentro do Distância de Cooperação, não estará visível para o veículo D e ainda não poderá esperar nenhuma cooperação.
- O Veículo D está ciente de A e B, mas não de C.
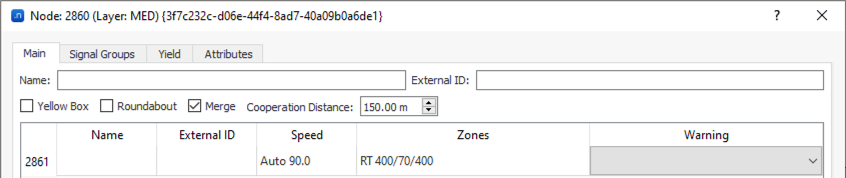
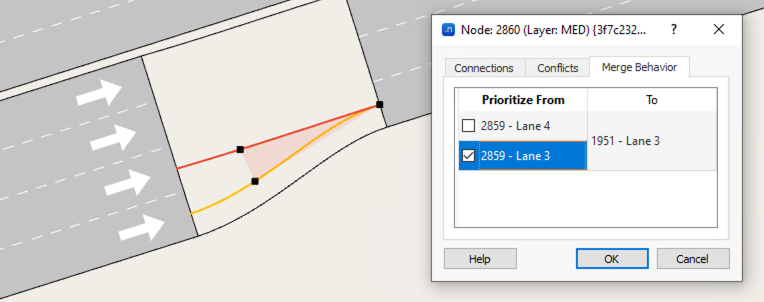
Em nós de convergência, os veículos que desejam se inserir e que estão dentro de Distância de Cooperação antes da área de conflito solicitam cooperação aos veículos que estão se aproximando do conflito e têm prioridade. Este parâmetro é definido no editor de Nó, guia Main.
A prioridade é identificada automaticamente pela conexão de movimento de conversão mais curta. No entanto, você pode substituir o cálculo padrão e definir qual é o movimento com prioridade no Editor Avançado de Nós, guia Merge Behaviour.
Em rampas de entrada e confluências, o mesmo modelo que faz os veículos cooperar criando uma brecha para veículos nas zonas 2 e 3 que precisam mudar de faixa se aplica.
Em rampas de entrada, ele é aplicado por veículos cooperativos na faixa da via principal adjacente à rampa para facilitar a inserção de veículos vindos da faixa da rampa. Em convergências, ele é aplicado por veículos que se aproximam da conexão de faixa com prioridade para permitir que veículos que se aproximam da conexão de faixa sem prioridade entrem no conflito à sua frente.
No entanto, há mecanismos e parâmetros adicionais de cooperação.
Tanto em alças de entrada quanto em convergências, além da cooperação criando um gap, há também uma cooperação por mudança de faixa que faz com que o veículo cooperante deixe a faixa que o veículo em incorporação usará.
A quantidade de veículos que cooperam em cada modalidade é definida no Cooperação para Criar uma Lacuna e Cooperação na Mudança de Faixa parâmetros no Editor de Seção: Aba Dynamic Models, caixa Lane Changing. Observe que cooperação ao mudar de faixa e cooperação ao criar uma brecha não são mutuamente exclusivas; portanto, as duas porcentagens são independentes.
Se Cooperação na Mudança de Faixa e Cooperação para Criar uma Lacuna forem iguais, todos os veículos cooperativos primeiro tentarão mudar de faixa e, se não conseguirem sair da faixa antes de alcançar o veículo com o qual cooperam, reduzirão a velocidade para criar uma brecha à frente para ele. Se Cooperação para Criar uma Lacuna é maior que Cooperação na Mudança de Faixa, alguns veículos cooperativos não tentarão mudar de faixa e apenas criarão uma lacuna. E se Cooperação na Mudança de Faixa é maior que Cooperação para Criar uma Lacuna, alguns veículos cooperativos apenas tentarão sair da faixa e não criarão uma brecha se não conseguirem mudar de faixa.
Modelo Gap-Acceptance: comportamento não prioritário ¶
Para todos os tipos de sinalização: Dê a preferência, Pare e RTOR, a decisão do veículo sobre cruzar ou dar preferência é tomada usando o mesmo Modelo de Aceitação de Brechas, embora a decisão seja tomada em situações diferentes. Quando um veículo encontra uma placa de Stop, ele para completamente antes de tomar a decisão sobre cruzar ou não. Quando um veículo encontra uma placa RTOR e o grupo semafórico que controla o movimento de conversão está vermelho, ele para completamente antes de tomar a decisão sobre cruzar ou não. Quando encontra uma placa de Yield, o veículo começa a aplicar o modelo de Gap-Acceptance assim que estiver mais próximo do que Distância de Visibilidade no Cruzamento até a linha de preferência. À medida que o veículo se aproxima da linha de preferência, ele começará a procurar uma brecha. Se encontrar uma, acelerará e cruzará sem a necessidade de parar na linha de parada. Se não encontrar uma brecha segura, continuará desacelerando e procurando uma brecha até poder cruzar ou até atingir a linha de preferência e parar.
Os parâmetros que controlam o Modelo de Aceitação de Brechas são definidos no Editor de Tipo de Via : Aba Parâmetros de Movimentos de Conversão mas os padrões fornecidos pelo tipo de via podem ser sobrescritos para cada movimento de conversão usando o editor de movimentos de conversão em Editor de Nó: Editor de Movimento de Conversão: Aba Modelos Dinâmicos. Cada tipo de veículo pode então fornecer uma faixa de Fator de Margem de Segurança valores como multiplicadores para a margem de segurança, afetando assim o comportamento por tipo de veículo e, dentro de cada tipo, também por veículo.
Vários parâmetros dos veículos também influenciam o comportamento do modelo de aceitação de brechas: velocidade de conversão, taxa de aceleração, velocidade desejada, aceitação do limite de velocidade. Eles são definidos no Editor de Tipo de Veículo: aba Dynamic Models e aba Microscopic.
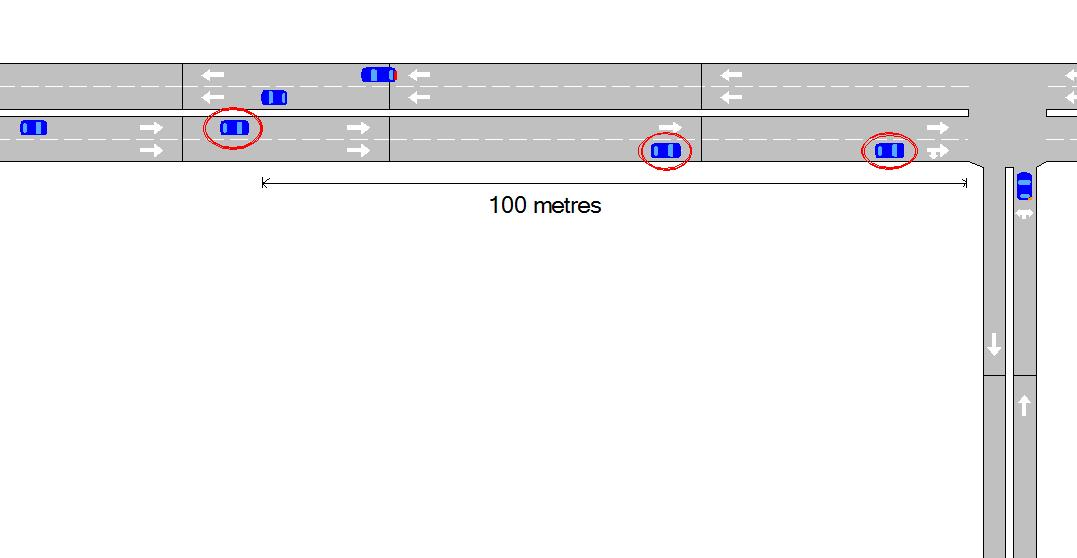
Um modelo de Aceitação de Brechas é usado para modelar o comportamento de dar preferência. Esse modelo determina se um veículo que se aproxima de uma interseção pode ou não cruzá-la dependendo dos veículos próximos com maior prioridade na junção. Esse modelo leva em conta a distância dos veículos até o ponto hipotético de colisão, suas velocidades e suas taxas de aceleração. Em seguida, determina o tempo necessário para que os veículos liberem a interseção e produz uma decisão que também inclui o nível de risco de cada motorista.
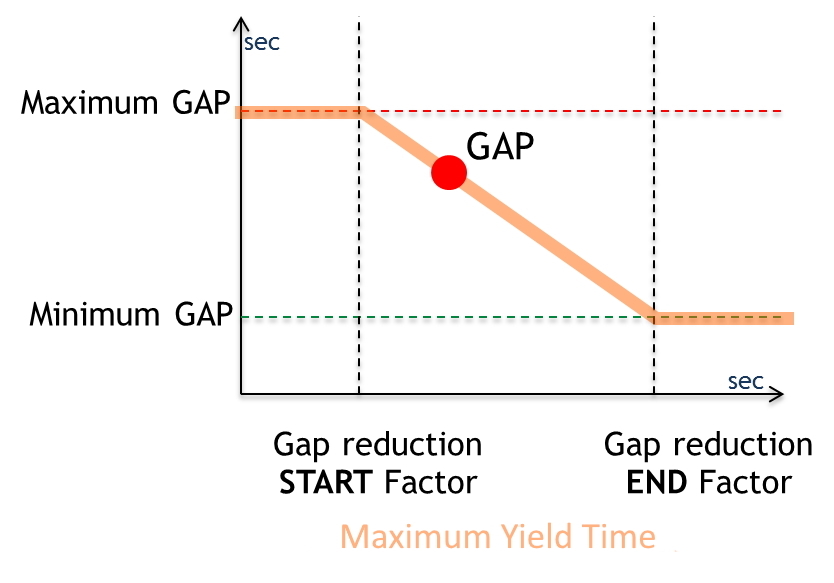
O gap necessário para realizar a manobra é determinado pelo tempo gasto aguardando o surgimento de um gap nos fluxos opostos. O valor inicial é MaximumGap; o valor final é MinimumGap. Depois de aguardar GapReductionStartTime * MaximumGap segundos, o gap é progressivamente reduzido, atingindo o valor mínimo de gap após GapReductionEndTime * MaximumGap segundos.
O algoritmo a seguir é aplicado para determinar se um veículo que se aproxima de uma placa Yield pode cruzar ou não. As localizações e os veículos são mostrados na figura abaixo:
Dado um veículo (VEHY) aproximando-se de uma interseção com sinalização de Dê a Preferência,
- Obter o veículo de prioridade mais alta mais próximo (VEHP)
- Determine o Ponto Teórico de Colisão (TCP)
- Calcular o tempo (TP1) necessário para VEHY alcançar TCP
- Calcular o tempo estimado (ETP1) necessário para VEHP alcançar TCP
- Calcular o tempo (TP2) necessário para VEHY cruzar TCP
- Calcular o tempo estimado (ETP2) necessário para que VEHP libere a interseção
- Se TP2 (mais a margem de segurança controlada pela equação Gap apresentada acima) for menor que ETP1, o veículo VEHY terá tempo suficiente para cruzar; portanto, ele acelerará e cruzará
- Caso contrário, se ETP2 (mais uma margem de segurança) for menor que TP1, o veículo VEHP já terá cruzado TCP quando VEHY o alcançar; então procure o próximo veículo mais próximo com prioridade mais alta, ele passa a ser VEHP e vá para a etapa 2
- Caso contrário, o veículo VEHY deve ceder a passagem, desacelerando e parando se necessário.
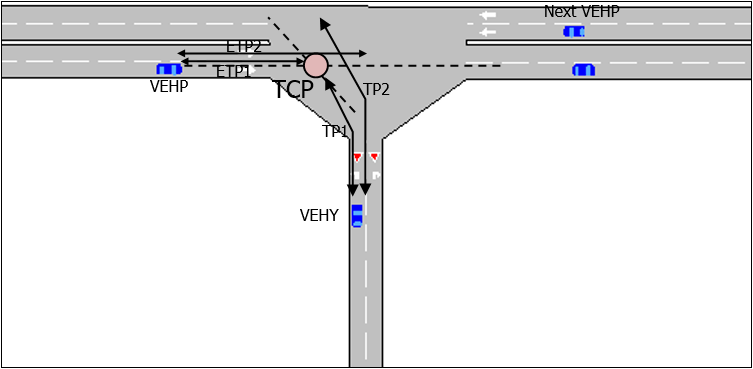
Somente veículos de prioridade mais alta que estejam dentro de seções localizadas total ou parcialmente dentro da distância de visibilidade do fluxo principal (por exemplo, 100 metros) do nó serão considerados pelo veículo de prioridade mais baixa, conforme mostrado pelos veículos circulados na figura abaixo.
Modelo de Ultrapassagem em Duas Mãos¶
O Modelo de Ultrapassagem em Via de Mão Dupla simula as manobras de ultrapassagem em rodovias rurais de duas faixas e dois sentidos. Este modelo cobre a avaliação de desejabilidade, a decisão e o processo de execução, e se baseia em parâmetros definidos no Editor de Experimento: Guia Comportamento, o Editor de Tipo de Veículo: Aba Microscópica, e o Editor de Seção: Aba Modelos Dinâmicos.
Observe que o Comportamento não baseado em faixas não é suportado em seções onde o modelo de ultrapassagem bidirecional em duas faixas está ativo.
Requisitos da Rede¶
A ultrapassagem em mão dupla requer que as seções opostas de duas faixas estejam vinculadas como Espelho seções. Isto está documentado em Editor de Seções.
Descrição do Modelo¶
A possibilidade de ultrapassagem é considerada para os veículos que estão em fila. Cada veículo que não consegue atingir sua velocidade desejada devido às condições de tráfego a jusante é considerado em fila. Os líderes da fila são identificados como os veículos que desencadeiam as filas, ou seja, o veículo que trafega em sua velocidade desejada.
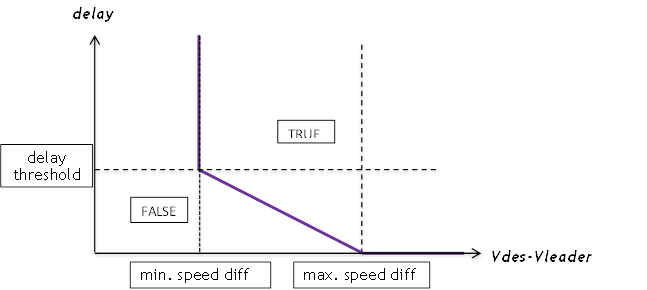
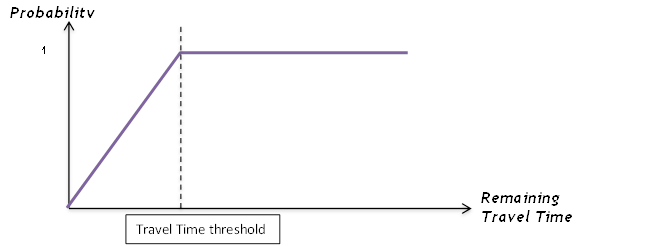
Para cada veículo na fila, o desejo de ultrapassar é avaliado com base em cinco características: sua posição na fila, o atraso induzido pela fila, a diferença de velocidade entre sua velocidade desejada e a velocidade real de seu líder imediato, e seu tempo de viagem restante. A função de desejabilidade é definida por parâmetros definidos para o Experimento:
- limite de tempo de atraso
- Limite mínimo de diferença de velocidade
- Limite máximo de diferença de velocidade
- classificação máxima
- Limite de tempo de viagem restante
- Número de ultrapassagens simultâneas permitidas
- Atraso entre ultrapassagens simultâneas
- Fator de sensibilidade para seguimento veicular reduzido
- Fator de aumento da velocidade de ultrapassagem
- Limiar de diferença de velocidade para velocidade de ultrapassagem aprimorada
Três parâmetros são definidos para a seção:
- Distância de visibilidade
- Fator de visibilidade
- Diferença de velocidade para ultrapassar com linha contínua
Dois parâmetros de tipo de veículo são definidos:
Estes parâmetros definem as seguintes curvas de atratividade apresentadas nas figuras a seguir:
![]()
Um veículo só pode decidir ultrapassar veículos que pertencem a um tipo de veículo cujo Pode ser ultrapassado parâmetro está ativo.
Se a decisão do veículo for ultrapassar, ele aplica o car-following com uma folga de segurança reduzida usando o parâmetro Car-following distance reduction factor e avalia a viabilidade da manobra de ultrapassagem.
A decisão de iniciar a ultrapassagem inclui verificar que nenhuma linha contínua proíbe a mudança para a faixa de ultrapassagem. Caso o veículo prestes a ultrapassar esteja atualmente sendo ultrapassado por outros veículos, ela leva em conta se a ultrapassagem múltipla é permitida, seguindo o número de manobras de ultrapassagem simultâneas permitidas, e se o atraso entre ultrapassagens simultâneas é respeitado.
Se permitido, a viabilidade de ultrapassagem é avaliada. Se a diferença de velocidade entre a velocidade desejada e a velocidade real do líder imediato for menor que o limiar de diferença de velocidade para aceitação da velocidade de ultrapassagem, o veículo usará uma velocidade desejada aprimorada para ultrapassagem especificada pelo fator de aprimoramento da velocidade de ultrapassagem.
A duração da manobra de ultrapassagem é calculada assumindo que o veículo mantém uma aceleração constante até atingir sua velocidade desejada, após o que mantém uma velocidade constante. O tempo até a colisão com o veículo em sentido contrário mais próximo também é calculado assumindo que este também mantém uma velocidade constante. Se não houver veículo em sentido contrário, ou se ele estiver localizado mais distante do que o distância de visibilidade dada pelo parâmetro de distância de visibilidade da seção a partir do fim da zona de ultrapassagem, o modelo gera um veículo fictício localizado na borda de visibilidade. A percepção da distância de visibilidade pode ser modificada usando o fator de visibilidade. O veículo fictício será posicionado na distância percebida em vez de na borda correta de visibilidade. Por fim, o tempo restante antes do fim da zona de ultrapassagem também é calculado.
O veículo iniciará a manobra de ultrapassagem se a manobra puder ser concluída antes do fim da zona de ultrapassagem e se a duração da manobra for menor que o tempo até a colisão, considerando uma margem de segurança definida pelo Margem para manobra de ultrapassagem em consideração.
Fora da zona de ultrapassagem, no caso da presença de uma linha contínua, as manobras de ultrapassagem ainda são permitidas se a diferença na velocidade desejada entre o veículo e seu predecessor exceder o Diferença de velocidade para ultrapassar com linha contínua. Isso permite que carros ultrapassem veículos muito lentos, como bicicletas ou tratores, por exemplo.
Uma vez tomada a decisão de ultrapassar, o veículo acelera com sua aceleração máxima até que sua velocidade desejada seja atingida. A viabilidade da manobra é reavaliada a cada passo de simulação durante a ultrapassagem. Dependendo da duração restante da ultrapassagem, do tempo até a colisão e de o veículo ter passado ou não pelo ponto crítico no qual abortar a manobra é mais lento do que completá-la, o veículo seguirá uma das cinco opções possíveis:
1. A manobra ainda não foi concluída e não há risco de colisão: O veículo continua ultrapassando usando uma aceleração constante correspondente à sua aceleração máxima até atingir sua velocidade máxima. Em seguida, continua ultrapassando em velocidade constante.
2. A manobra é concluída: O veículo retorna para sua faixa original à frente do veículo que estava ultrapassando.
3. A manobra ainda não foi concluída e há risco de colisão, mas não imediato: o veículo acelera para concluir a manobra antes da colisão.
4. A manobra ainda não foi concluída, há um risco imediato de colisão e o veículo já passou pelo ponto crítico: o veículo acelera para retornar à sua faixa de origem à frente do veículo ultrapassado, forçando-o a desacelerar.
5. A manobra ainda não foi concluída, há risco imediato de colisão e o veículo ainda não passou pelo ponto crítico: o veículo aborta a manobra de ultrapassagem. Ele retorna à sua faixa original desacelerando atrás do veículo que estava tentando ultrapassar.
Modelagem da Aceleração e Influência de Rampas ¶
O simulador microscópico inclui diferentes modelos para calcular a aceleração dos veículos. Como o microsimulador é baseado em um modelo de car-following, os modelos de aceleração são retrospectivos.
Isso significa que a aceleração/desaceleração é deduzida a partir da velocidade do veículo. Podemos distinguir duas abordagens de modelo: modelos que usam apenas a influência da inclinação e modelos que usam vários parâmetros, incluindo configurações do veículo, propriedades da via e comportamento do motorista.
Para a primeira abordagem, o Aimsun Next usa o modelo de aceleração TWOPAS e o modelo de velocidade de arrasto em descida para veículos pesados. Para a segunda abordagem, o Aimsun Next usa o modelo MFC (Microscopic Free-flow Acceleration).
Modelos apenas de inclinação¶
Modelos de declividade simulam o impacto de aclives e declives na velocidade e na aceleração dos veículos. Esses modelos dependem de parâmetros definidos na caixa de diálogo Experiment > aba Behavior, na caixa de diálogo Vehicle Type > aba Dynamic Models e na caixa de diálogo Section > aba Slope.
O Aimsun Next contém três modelos de inclinação:
-
Modelo de declividade padrão
-
modelo de aceleração e declividade TWOPAS
-
Modelo de velocidade de arrasto em descida para veículos pesados.
O modelo de inclinação padrão é iniciado automaticamente quando uma seção contém uma inclinação ascendente ou descendente.
No entanto, se a aba Dynamic Experiment > Behavior tiver Aplicar Modelo de Declividade TWOPAS marcada, e se a aba Vehicle Type > Dynamic Models tiver Velocidade em Rampas Afetada pelo Peso (Modelo TWOPAS) marcada, então a aceleração e a velocidade do veículo são calculadas usando as fórmulas explicadas no Modelo de Aceleração e Rampa TWOPAS seção. Isso substitui os valores de velocidade e aceleração calculados usando o modelo de Gipps. Também inicia o modelo de velocidade de arrasto em declive para veículos pesados.
Modelo de Rampa Padrão¶
O modelo de declividade padrão simula o impacto de rampas ascendentes e descendentes no movimento de um veículo aumentando ou diminuindo sua aceleração e desaceleração, de acordo com o tipo de declividade. Ele é modelado por meio de um aumento ou redução da capacidade de aceleração e frenagem. É uma função da declividade e da aceleração máxima desejada para o veículo e não inclui o peso do veículo como fator.
O modelo de declividade padrão fornece a aceleração máxima de um veículo usando a seguinte equação.

Onde:
- a = a aceleração desejada calculada por Gipps
- s = a inclinação expressa como gradiente percentual.
As unidades de declividade são expressas como porcentagem. Para evitar valores de aceleração zero ou negativos, o valor mínimo é definido como 10% da aceleração desejada máxima. Se a seção for plana (slope = 0), a aceleração máxima não é alterada em relação ao valor padrão.
TWOPAS Modelo de Aceleração e Declividade¶
O modelo de aceleração e declividade TWOPAS simula o impacto da potência do motor, peso, resistência do ar e declividades sobre a velocidade e a aceleração de um veículo. Ao contrário do modelo de declividade padrão, este modelo também afeta os movimentos dos veículos em locais planos, pois fornece um perfil de aceleração mais detalhado para um veículo do que o modelo Gipps padrão. O detalhamento aprimorado vem da consideração da potência do motor, peso e resistência do ar.
Este modelo se aplica quando a aba Comportamento do experimento dinâmico tem Aplicar Modelo de Declividade TWOPAS marcada, e se a aba Dynamic Models do tipo de veículo tiver Velocidade em Rampas Afetada pelo Peso (Modelo TWOPAS) marcada. Ela substitui os valores de velocidade e aceleração calculados usando o modelo de Gipps.
O modelo de aceleração e declividade TWOPAS foi implementado usando as equações 9 e 10 das páginas 34 e 35 de Capability and Enhancement of the VDANL and TWOPAS for Analyzing Vehicle Performance on Upgrades and Downgrades With IHSDM (Report FHWA-RD-00-078, 2000).
Observe que essas fórmulas foram originalmente projetadas para veículos com peso superior a 10 toneladas. No entanto, é possível, com cuidado, usar o modelo TWOPAS para todos os tipos de veículos.
A aceleração em aclives é calculada da seguinte forma.
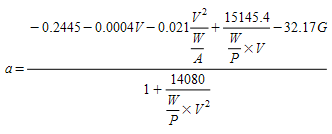
Onde:
-
V é a velocidade atual em pés/s
-
G é o ângulo da inclinação em radianos
-
W/P é a relação peso-potência em lb/hp
-
W/A é a relação peso-superfície frontal em lb/ft2.
A velocidade de arrasto é obtida resolvendo a equação para a = 0 numericamente. Nesse ponto, a velocidade máxima é limitada à velocidade de arraste porque o nível de resistência do ar e da inclinação é igual à potência do motor. No entanto, ele não fornece uma velocidade de arraste detalhada para declives descendentes para veículos pesados. Para essa finalidade, deve ser usado o modelo de velocidade de arraste em declive descendente (consulte a próxima seção).
Modelo de Velocidade de Arrasto em Declive para Veículos Pesados¶
O modelo de velocidade de arrasto em descida para veículos pesados simula o impacto de declives na velocidade de um veículo. Ele usa o peso do veículo, a severidade do declive e o comprimento do declive. Ele foi projetado para ser usado em veículos pesados que utilizam uma marcha mais baixa ao descer e reduzem sua velocidade para evitar o superaquecimento dos freios.
A velocidade máxima é calculada usando a equação 35 na página 83 de Viabilidade de um Sistema de Classificação de Severidade de Greide (Report FHWA-RD-79-116, 1980) as follows.

Onde:
-
Vmax é a velocidade máxima em mph
-
W é o peso em lbs
-
G é o ângulo da inclinação em radianos
-
L é o comprimento da rampa descendente em milhas
Observe que o comprimento total do declive é levado em conta. O Aimsun Next usa o comprimento de cada seção para realizar este cálculo, portanto ele é muito importante não para dividir o declive descendente em seções separadas, se possível.
Para garantir consistência entre aclives e declives, a velocidade mínima de arrasto em declive é definida para corresponder à velocidade de arrasto de uma seção em aclive com a mesma inclinação. Se a velocidade desejada for menor que a velocidade de arrasto em declive, então a velocidade desejada será usada.
Por esse motivo, o modelo não alteraria a velocidade em descida para a maioria dos veículos. Ele só alteraria a velocidade em descida do veículo quando o peso do veículo fosse muito elevado e em uma rampa descendente muito íngreme e muito longa (por exemplo, 40 toneladas em uma seção em descida de três milhas com inclinação de 7%).
Para modelos mesoscópicos, consulte Ajuste de parâmetros de modelagem no simulador mesoscópico.
Modelo Microscópico de ACeleração em Fluxo Livre (MFC)¶
O modelo MFC (às vezes denominado Microscopic Free-flow aCceleration Model) é um modelo retrospectivo, que deduz aceleração e desaceleração a partir da velocidade do veículo e de cada componente usado na operação do veículo. O modelo MFC baseia-se nestes dois artigos:
Makridis M, Fontaras G, Ciuffo B, & Mattas K. "MFC Free-Flow Model: Introducing Vehicle Dynamics in Microsimulation", Transportation Research Record, 2019; 2673(4): 762-77, doi:10.1177/0361198119838515.
He Y, Makridis M, Mattas K, Fontaras G, & Ciuffo B, Xu H. Introducing Electrified Vehicle Dynamics in Traffic Simulation, Transportation Research Record, 2020; 2674(9): 776-791, doi:10.1177/0361198120931842.
Este modelo assume condições de fluxo livre e aplica os seguintes princípios em etapas cruciais:
- À medida que um veículo se aproxima do veículo à frente, sua aceleração máxima é aplicada até que o veículo à frente se torne o líder no modelo de car-following.
- Nos controles de preferência/dê a preferência, a aceleração é levada em conta ao calcular o tempo necessário para alcançar e passar por esses pontos.
- Nos semáforos, o modelo MFC é aplicado apenas ao primeiro veículo, a menos que haja grandes intervalos entre veículos, caso em que será aplicado a um segundo veículo, distante, e assim por diante. Para veículos acelerando em um sinal verde, ele afeta a taxa com que os veículos passam pelo semáforo e como atingem a velocidade desejada, quando os limites de velocidade permitem.
Os tempos de reação não desempenham nenhum papel em nenhum dos nossos modelos de aceleração porque Reaction Time é um parâmetro restrito do modelo de seguimento veicular. Eles também não têm efeito no modelo de mudança de faixa porque as condições de tráfego são baseadas na velocidade desejada.
O modelo MFC é capaz de capturar, de forma precisa e consistente, a dinâmica de aceleração dos veículos rodoviários usando uma abordagem leve. Ele calcula médias dos parâmetros dos veículos por categorias de veículos e leva em consideração as diferentes condições viárias e o comportamento dos motoristas definidos no Aimsun Next. O MFC requer as seguintes entradas:
-
Veículo
-
Categoria de veículo (definida pelo tipo de veículo)
-
Tipo de motor (definido pela composição da frota do tipo de veículo)
-
Segmento (obtido da distribuição do parâmetro Peso)
-
Comportamento do condutor
-
Troca de marchas (definida pela agressividade de aceleração do tipo de veículo)
-
Estilo de condução (definido pela agressividade de aceleração do tipo de veículo)
-
Condições da via
-
Declividade (definida pelo segmento da seção: P1, P2, P3, etc.)
-
Clima (definido na aba Parameters do cenário)
Você pode definir a categoria do veículo na caixa de diálogo Vehicle Type. Aqui você também pode definir a composição por tipo de motor. O segmento do veículo é definido para cada veículo com referência à sua distribuição Weight, que você pode configurar em Vehicle Type > Dynamic Models > subaba Main. Atualmente, apenas os seguintes segmentos para a categoria Car estão incluídos: A, B, C, D, E, F, J, M (para mais informações, consulte o artigo da Wikipedia Segmento Euro Car). O Euro Car Segment é definido pelo peso do veículo gerado. A distribuição do Euro Car Segment por Engine Type e por Weight (em quilogramas) é a seguinte:
-
Gasolina:
A (800–999), B (1000–1179), C (1180–1299), D (1300–1589), E (1590–1749), F (1750–2600), J (1180–2600), M (1300–1589)
-
Diesel:
A (800–999), B (1000–1199), C (1200–1379) D (1380–1599), E (1600–1849), F (1850–2600), J (1200–2600), M (1380–1599)
-
Elétrico:
A (800–1249), B (1250–1459), C (1460–1699) D (1700–2099), E (2100–2449), F (2450–2600), J (1460–2600), M (1700–2099)
Você observará que alguns pesos em C, D, E e F se sobrepõem a pesos equivalentes em J. Além disso, o segmento D se sobrepõe ao segmento M. Isso significa que, se você definir uma das quatro primeiras categorias, também poderá capturar alguns veículos de J e M, respectivamente. O conjunto de segmentos baseia-se no seguinte percentual de distribuição de vendas: 75% são C, E e F (dependendo do Weight), 25% são J. No caso do segmento D, o percentual de distribuição é: 25% são D, 25% são J e 50% são M.
Com essas três entradas (categoria, tipo de motor, segmento), o Aimsun Next pode definir os parâmetros internos adequados do motor de cada veículo e definir curvas padrão que relacionam velocidade e aceleração, levando em conta os parâmetros de diferentes veículos.-SB Nota para mim mesmo: talvez sejam necessários subtítulos menores ou pequenas instruções de To Do como parte deste tópico?
O comportamento do motorista é representado no modelo pela troca de marchas e pelo estilo de condução, ambos ajudando a definir a agressividade de aceleração dos veículos. O estilo de condução é calculado a partir de uma distribuição normal da agressividade de aceleração, e a troca de marchas é fixada por uma distribuição normal do estilo de condução com um desvio de 0,2, a fim de evitar perfis de motorista irrealistas (ambos os valores de atributos são incluídos no editor de veículos de simulação).
A estratégia de troca de marchas correlaciona os pontos de troca quando o motorista muda de marcha com a curva de potência do veículo e, portanto, com a velocidade operacional do trem de força do veículo. O estilo de condução define a quantidade de aceleração/desaceleração potencial que um motorista pode usar.
Além disso, o modelo inclui as forças de resistência que atuam sobre o movimento do veículo. Você pode definir a inclinação na caixa de diálogo Section e definir as condições meteorológicas na aba Parameters do experimento. O clima afeta o coeficiente de atrito da via e, portanto, a força trativa máxima do veículo em cada passo de tempo. O coeficiente de atrito aplicado pelo clima é baseado na literatura:
- Padrão (sem conjunto): 0.75
- Dry: 0.80
- Sunny: 0.75
- Molhado (chuva fraca): 0.60
- Chuvoso (chuva forte): 0.40
- Foggy: 0.25
- Snowy (icy): 0.10
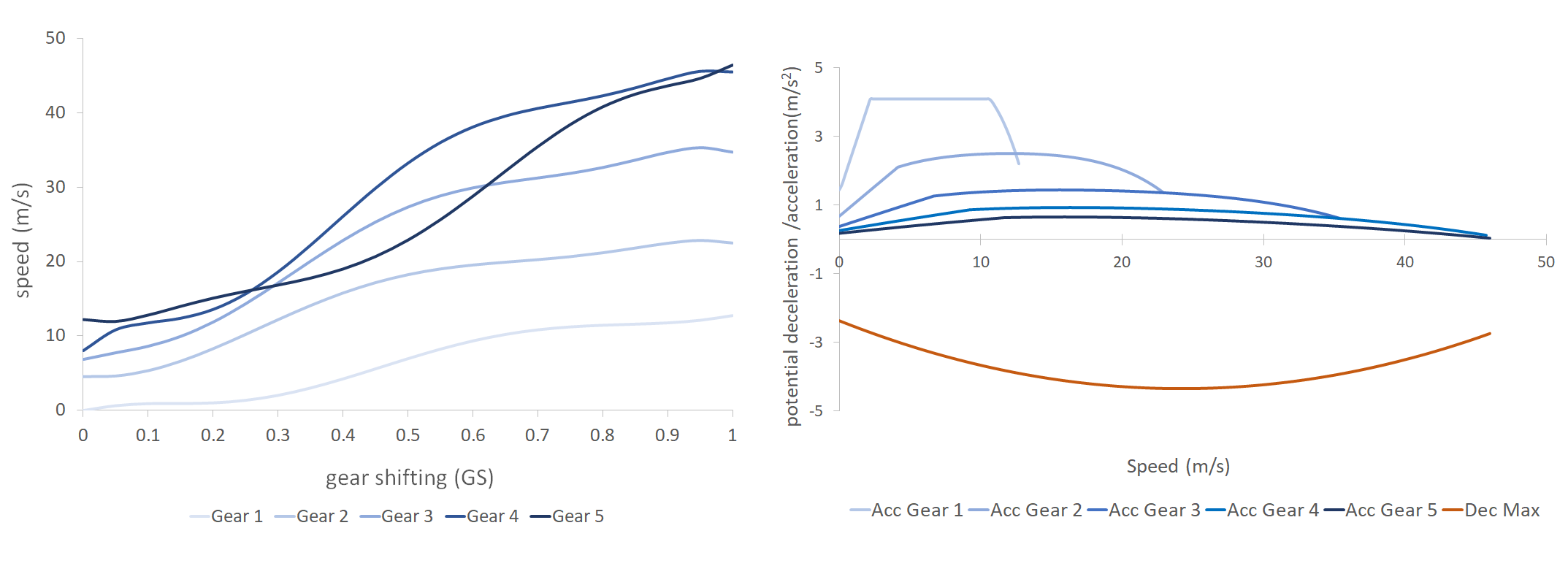
O modelo utiliza a curva de plena carga dos motores a combustão e a curva de potência dos motores elétricos para calcular a aceleração potencial versus a curva de velocidade. A partir dessas curvas fundamentais, o modelo obtém os valores finais de aceleração, considerando as resistências que dependem das condições ambientais.
No caso dos motores de combustão (gasolina e diesel), é usada transmissão manual, portanto ela também inclui limites de velocidade devido à troca de marchas, que depende do comportamento do motorista.
As curvas de desaceleração para todos os motores são calculadas a partir de uma curva sintética calibrada para cada Segmento Euro de Automóveis e validada pelos testes em dinamômetro de chassi de He et al 2020. Elas incluem o efeito do coeficiente de atrito e um fator de correção de carga calibrado pelo experimento contido em Testing Automobile braking parameters by varying the load weight, de Berzoja et al 2019. Além disso, o modelo aplica um fator de estilo de condução à aceleração/desaceleração final.
As curvas a seguir são as curvas MFC para uma determinada condição da via para um veículo Petrol-Euro Car Segment A.
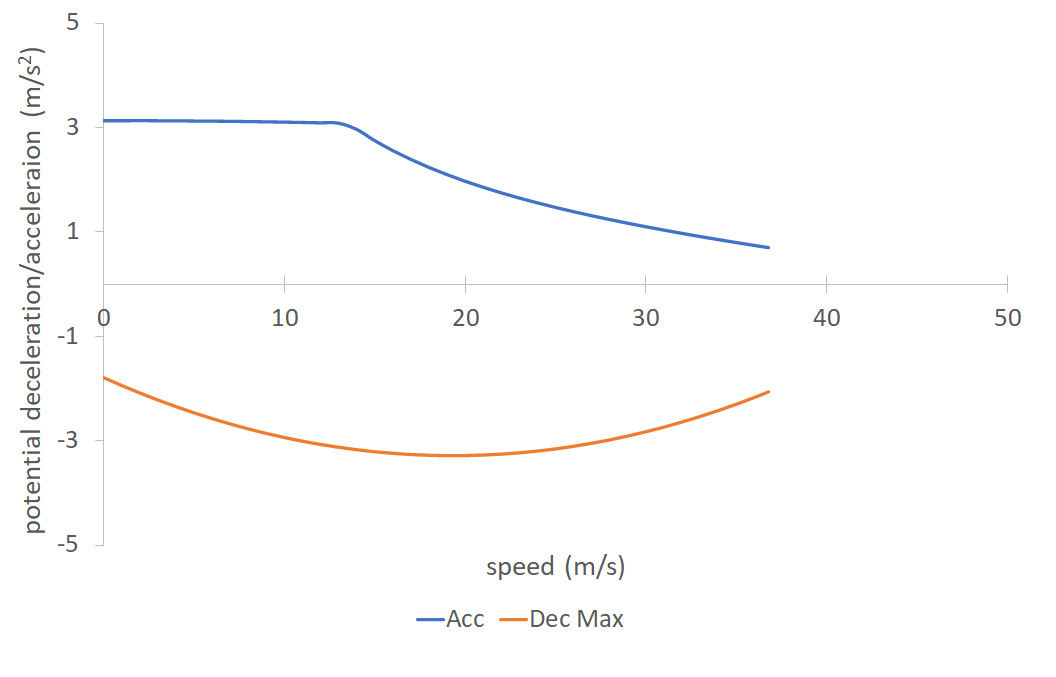
Este próximo exemplo trata de veículos elétricos e mostra as curvas Electric-Euro Car Segment A. Neste caso, a curva de desaceleração é uma curva sintética obtida e estendida para diferentes perfis de veículos. Ela foi retirada do teste de validação no artigo de He et al., 2020:
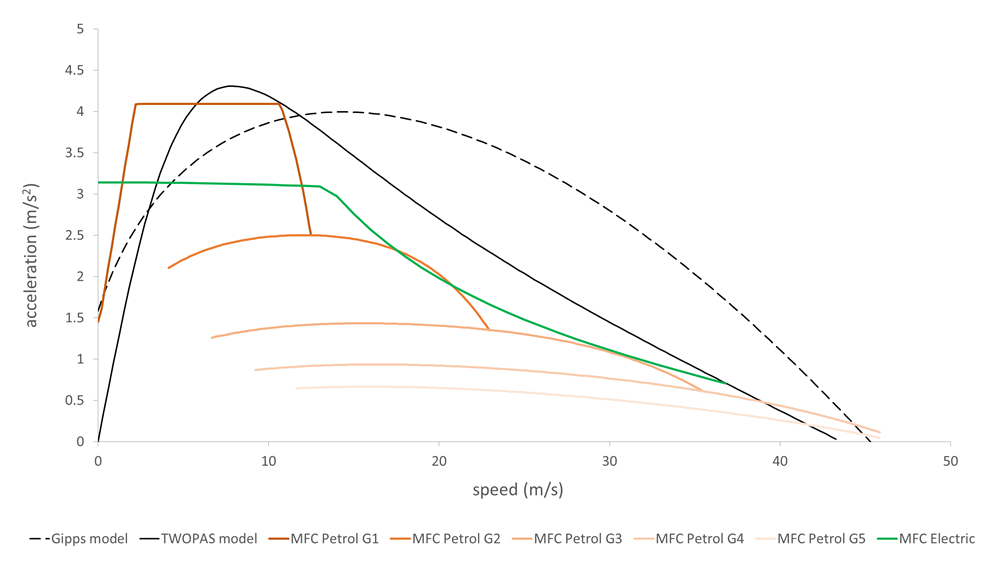
Por fim, para comparar modelos complexos e mais simples, aqui está uma curva de aceleração/velocidade de todos os modelos de aceleração incluídos no Aimsun Next para um perfil de veículo semelhante (Gipps é o modelo de car-following):
Parâmetros do motorista¶
Tempo de Reação do Motorista¶
Este é o tempo que um motorista leva para reagir a alterações de velocidade no veículo precedente. Ele é usado no modelo de seguimento veicular. O Reaction time pode ser Fixed (igual ao Simulation Step) ou Variable (múltiplo do Simulation Step). No caso de Fixed, é o mesmo valor para todos os veículos. No caso de Variable, o usuário pode definir uma função de probabilidade discreta para cada tipo de veículo (veja a Figura abaixo). Observe que, para cada tipo de veículo, a soma das probabilidades deve ser 1.0. O Reaction Time de cada veículo individual será amostrado a partir dessa distribuição.
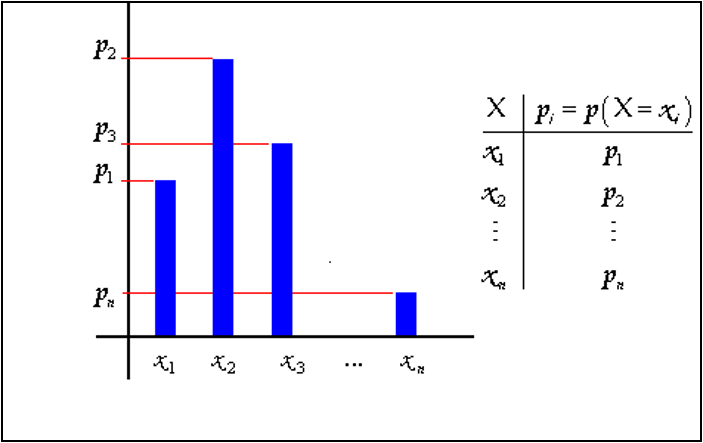
Exemplo:
- Tipo de veículo carro
- Valores do Tempo de Reação: x1=0.6, x2=0.7, x3=0.8
- Probabilidades: p1=0.2, p2=0.7, p3=0.1
O Reaction Time atribuído a um veículo é fixo para esse veículo, mas pode ser ajustado em seções específicas editando a "Reaction Time Variation" da seção por meio do Visualização em tabela. O tempo de reação de um veículo em uma seção é calculado como:

em que:
- \(RT_{v,s}\) é o tempo de reação do veículo v na seção s
- \(RT_{v}\) é o tempo de reação do veículo v
- \(RTvar_{s}\) é a variação do tempo de reação na seção s
- \(SimStep\) é o passo da simulação
Tempo de reação na parada e tempo de reação no semáforo¶
Os tempos de reação dos veículos são definidos no Editor de Experimentos: Aba Tempos de Reação e pode ser definido para todos os tipos de veículo ou definido individualmente para diferentes tipos de veículo.
-
Tempo de reação na parada é o tempo que um veículo parado leva para reagir à aceleração do veículo à frente.
-
Tempo de reação no semáforo é o tempo que o primeiro veículo parado após um semáforo leva para reagir à mudança do semáforo para verde.
O tempo de reação na parada é usado como tempo de reação apenas para veículos que partem de uma condição parada, enquanto o tempo de reação normal é usado para veículos em movimento. O tempo de reação na parada tem forte influência no comportamento de dissipação de filas e, portanto, fornece ao usuário um parâmetro importante de calibração na modelagem de filas.
Comprimento da Fila Microscópica¶
As velocidades que controlam se um veículo é marcado como estando em fila são definidas em Editor de Experimento: Guia Comportamento.
Velocidade de Entrada na Fila¶
Veículos cuja velocidade diminui abaixo deste valor-limite (em m/s) são considerados parados e, consequentemente, em uma fila. Esse parâmetro afeta a coleta de dados estatísticos para paradas e filas. Sempre que a velocidade de um veículo diminui abaixo da velocidade de entrada em fila, uma nova parada para esse veículo é adicionada à estatística de número de paradas. A mesma parada será considerada enquanto a velocidade permanecer abaixo do parâmetro de velocidade de saída da fila. Quando a velocidade do veículo fica acima do parâmetro de velocidade de saída da fila, ele deixa de ser considerado em uma fila ou parado. Uma nova parada será adicionada às estatísticas de número de paradas quando a velocidade do veículo ficar abaixo da velocidade de entrada em fila novamente.
Velocidade de Saída da Fila¶
Veículos que estão parados em uma fila cuja velocidade aumenta acima deste valor-limite (em m/s) são considerados como tendo deixado a fila e não estando mais parados. Este parâmetro afeta a coleta de dados estatísticos para paradas e filas.
Os parâmetros Queue Entry e Queue Exit Speed também influenciam o modelo de mudança de faixa. Um veículo trafegando na zona 3 de uma seção não está disposto a esperar por uma brecha por mais tempo do que Tempo Máximo de Cedência mais o Tempo de Espera Adicional Antes de Perder o Movimento de Conversão parado e a condição de parada é determinada por estes parâmetros.
Parâmetros Globais de Simulação¶
Passo da Simulação¶
O intervalo de tempo de atualização do sistema, também chamado de ciclo. A cada passo de simulação, o estado de todos os elementos do sistema é atualizado (isto é, veículos e eventos, como mudanças semafóricas). O Simulation Step pode variar de 0,1 a 1,5 segundos e pode ser diferente do Tempo de Reação parâmetro.
Regra de circulação¶
Ao editar uma rede, o usuário pode definir se os veículos trafegam pelo lado esquerdo ou direito da via, como parâmetro global para toda a rede. Esse parâmetro é levado em conta no modelo de mudança de faixa da seguinte forma:
- Quando um veículo tenta ultrapassar outro veículo, ele tentará fazê-lo usando a faixa adjacente à esquerda ao trafegar pelo lado direito, ou a faixa adjacente à direita ao trafegar pelo lado esquerdo.
- Quando um veículo está trafegando rápido o suficiente e deseja retornar para a faixa mais lenta, ele tentará ir para a faixa mais à direita ao trafegar pela direita e para a faixa mais à esquerda ao trafegar pela esquerda.
- Quando um veículo entra na rede por uma seção, ele preferirá usar a faixa mais à direita ao dirigir pela direita e a faixa mais à esquerda ao dirigir pela esquerda.
Como resultado desta modelagem, em uma rede com circulação pela esquerda, os veículos tendem a dirigir usando a faixa mais à esquerda das seções e, em redes com circulação pela direita, os veículos tendem a preferir as faixas mais à direita. O efeito desse parâmetro nos resultados da simulação varia dependendo da geometria e do tipo da rede (urbana ou interurbana), mas ele sempre afeta o comportamento dos veículos.
Distinguir faixas de destino em movimentos de conversão¶
Este parâmetro indica se o usuário pode ou não especificar as possíveis faixas de destino ao definir um movimento de conversão.
Quando este parâmetro é definido como NO, assume-se que todas as faixas da seção de destino em um movimento de conversão são possíveis. Isso significa que, ao definir um movimento de conversão, o usuário pode escolher a seção de origem, as faixas dessa seção onde o movimento de conversão é permitido e a seção de destino, mas não as faixas da seção de destino. Se este parâmetro for definido como YES, ao definir um movimento de conversão o usuário pode escolher não apenas as faixas da seção de origem onde o movimento de conversão será permitido, mas também as faixas na seção de destino. Quando um veículo realiza um movimento de conversão, ele poderá então usar apenas as faixas especificadas, tanto para as seções de origem quanto de destino.
Estes dois parâmetros são editados no Editor de Preferências.
Sementes Aleatórias¶
Em simulações dinâmicas, a diferente semente aleatória encontrada na replicação ou no resultado é o que faz com que todos os processos estocásticos que ocorrem na simulação (parâmetros dos veículos, horários de partida dos veículos, escolha de caminho, etc.) levem a diferenças nos resultados.
Além disso, quatro sementes aleatórias específicas são, por padrão, derivadas automaticamente da semente mestre. Como pode haver casos de uso nos quais é necessário controlar de forma mais refinada o que muda entre replicações, essas sementes específicas podem ser definidas pelo usuário na pasta da aba Atributos da replicação/resultado.
Isto permite a simulação de diferentes replicações com, por exemplo, a geração de diferentes veículos privados, mas com os mesmos veículos de transporte público.
-
Random Seed: A semente aleatória geral, contida na aba principal de uma replicação/resultado, é usada para gerar todas as sementes que estão definidas como 0 (padrão) nos atributos da replicação/resultado e, portanto, afeta todos os aspectos da simulação controlados pelas sementes específicas descritas abaixo. Além disso, ela sempre controla o arredondamento de viagens em uma matriz decimal e os headways de geração (horários de partida) dos veículos privados quando as chegadas estão definidas como Uniform, Normal ou Exponential, e o tempo aleatório para a primeira geração em chegadas Randomly Initialized Constant.
-
Gerenciamento de Tráfego: Esta semente é usada quando há um processo aleatório associado a uma ação de gerenciamento de tráfego, por exemplo, a localização, o tamanho e a ocorrência de um incidente periódico em uma seção, ou a escolha de um subcaminho associado a uma conversão forçada. A adesão a uma ação de gerenciamento de tráfego não depende desta semente, pois usa um número aleatório armazenado nas propriedades de um veículo e, portanto, depende da semente de geração do veículo.
-
Transit: Esta semente é usada para definir, para veículos de transporte público, o horário de partida no início da linha (se um desvio tiver sido definido no horário) e o tempo de permanência em cada parada (se um desvio tiver sido definido no horário). Ela também é usada para definir os parâmetros individuais do veículo de transporte público (comprimento do veículo etc.).
-
Atribuição de Veículos: Esta semente é usada para selecionar o caminho de um veículo a partir de um conjunto de caminhos calculados por DUE ou SRC, ou fornecidos como entrada como rotas OD. Cada tipo de caminho e cada caminho dentro do tipo de caminho tem uma probabilidade de uso, e esta semente é usada para selecionar um caminho entre o conjunto de escolha. Portanto, ela tem efeito sempre que várias rotas estão disponíveis para o mesmo par OD.
-
Geração de Veículos: Esta semente é usada para gerar as propriedades de cada veículo privado no tipo de veículo. Isso inclui, entre outros, comprimento do veículo, velocidade desejada máx., variabilidade de antecipação, conformidade com o gerenciamento de tráfego, aceitação de velocidade e tempo máximo de cedência. Observe que, ao definir um desvio de 0 para um parâmetro que usa uma distribuição normal truncada, ele deixa de variar com a semente aleatória e sempre usará o valor médio, mas também deixará de variar entre veículos do mesmo tipo na mesma simulação. O mesmo ocorre para parâmetros distribuídos uniformemente entre um valor mín. e um valor máx.; quando ambos são iguais, o valor será o mesmo para todos os veículos do mesmo tipo em qualquer simulação.

Como essas quatro sementes específicas estão disponíveis tanto em meso quanto em micro, elas também podem ser aplicadas em todas as simulações dinâmicas, incluindo híbridas.