Modelagem de Tráfego Meso¶
A principal diferença entre o mesoscópico e abordagem microscópica é o uso de eventos discretos para simular movimentos de veículos pela rede, em vez da simulação de passos de tempo discretos. Com essa exceção, a maioria dos módulos e conceitos no Aimsun Next é compartilhada entre a simulação mesoscópica e microscópica. Por exemplo, o processo de entrada de veículos, os dados de demanda de tráfego, a geometria da rede, os dados de veículos e o plano de controle são comuns a ambos os modos.
Observação sobre licenças: A simulação mesoscópica está disponível nas assinaturas anuais Aimsun Next Advanced ou Expert Edition.
Processo de entrada de veículos¶
O processo de geração de tráfego (chegadas) determina os tempos de headway entre chegadas de veículos. Esses headways são usados para gerar os veículos que entrarão usando carregamento dinâmico da rede. Os veículos entram na rede por meio de centroides de origem, em que um centroide de origem pode ser conectado a uma seção ou a um nó. A estrutura da rede para ambas as situações é mostrada na captura de tela abaixo.
Em ambos os casos, os veículos entram no real rede por meio de virtual movimentos de conversão quando o servidor do nó considera que há espaço suficiente na rede para o veículo entrar (e formar fila em uma virtual seção a montante se não houver espaço para entrar).
Modelagem do Movimento de Veículos¶
O movimento do veículo é dividido em dois modelos:
- Modelagem do movimento de veículos em seções
- Seguimento veicular
- Mudança de faixa
- Modelagem do movimento de veículos em nós (Modelo de nó)
- Modelagem do movimento de veículos em movimentos de conversão
- Modelagem do movimento de veículos das seções para os movimentos de conversão
- Aplicar modelo de aceitação de brechas
- Aplicar modelo de seleção de faixa

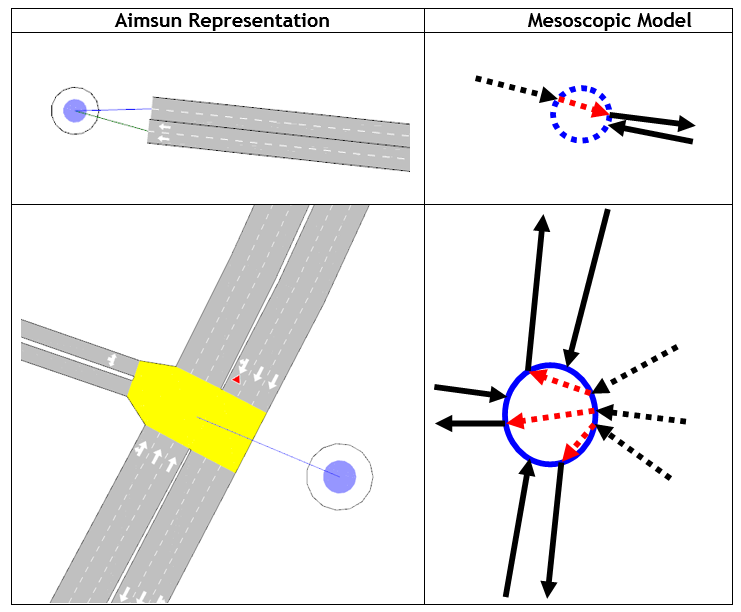
No Aimsun Next, os principais elementos da rede são seções e movimentos de conversão que conectam duas seções (e nós, que são contêineres de movimentos de conversão). No representação mesoscópica da rede, os nós são interpretados como nós mesoscópicos.
Em uma simulação mesoscópica, assume-se que os veículos se movem por seções e movimentos de conversão, de modo que seções e movimentos de conversão se tornam contêineres de veículos. Uma consequência direta disso é que todos os nós são considerados caixas não amarelas. O SectionCapacity, em termos do número de veículos que podem estar contidos a qualquer momento em uma seção, é calculado de acordo com esta fórmula:
SectionCapacity = JamDensity * Length * NumberLanes
em que
- JamDensity é o Densidade de congestionamento parâmetro definido em seções viárias
- Comprimento é o comprimento da seção, considerando coordenadas 3D
- NumberLanes é o número total de faixas em uma seção, considerando rampas de entrada e de saída
A capacidade do movimento de conversão TurnCapacity é calculado de maneira semelhante:
TurnCapacity = JamDensity * Length * NumberLanes
- JamDensity é o parâmetro Densidade de Congestionamento da seção de origem
- Comprimento é o comprimento do movimento de conversão, considerando coordenadas 3D
- NumberLanes é o número total de faixas de destino
Modelos de car-following e lane-changing são aplicados para calcular o tempo de viagem da seção. Este é o instante mais cedo em que um veículo pode alcançar o fim da seção, levando em conta o estado atual da seção (número de veículos na seção). A modelagem dos movimentos dos veículos nas seções no simulador mesoscópico é baseada no trabalho de Mahut (1999a, 1999b, 2001).
O capacidade máxima esperada por faixa (veh/h), ou fluxo máximo de vazão, \(Q_{max}\), pode ser calculado com a seguinte fórmula:
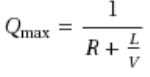
onde - R é o tempo de reação global (definido no experimento) multiplicado pelo fator de tempo de reação da seção - L é 1/JamDensity - V é o limite de velocidade
Fator de Tempo de Reação¶
O fator de tempo de reação pode ser definido tanto nos níveis de seção quanto de movimento de conversão. O fator de tempo de reação da seção é usado nas seguintes situações:
- Medidores de Rampa, ao mudar de vermelho para verde.
- Modelo de seleção de faixa para selecionar a faixa de partida.
- Modelo de acompanhamento veicular para calcular os tempos intermediários de entrada na seção no caso particular de seções que são cortadas internamente para os cálculos do modelo, por exemplo quando há rampas de entrada/saída ou incidentes.
- No modelo de car-following, o tempo de reação do veículo líder também é usado para calcular um espaçamento mínimo em relação a esse líder. Nesse cálculo, o fator de tempo de reação da seção também é aplicado.
- Estatísticas de fila: para calcular as estatísticas de fila, o tempo de reação do veículo é usado para calcular o tempo de espera na fila. Nesse cálculo, é aplicado o fator de tempo de reação da seção. Veja em Comprimento de Fila Mesoscópico como os veículos são considerados em fila.
O fator de tempo de reação do movimento de conversão é usado nas seguintes situações:
- Semáforos, ao mudar de vermelho para verde.
- Car-following – quando o veículo está no movimento de conversão, o fator de tempo de reação do movimento de conversão é usado para calcular os tempos de saída do nó dos outros movimentos de conversão que têm conflito espacial com o movimento de conversão, e também é usado para calcular o tempo de entrada quando o veículo está prestes a entrar na próxima seção.
Modelo de nó ¶
O simulador mesoscópico do Aimsun Next é baseado em um modelo de nó que move veículos de uma seção para a próxima seção de seu caminho. Este modelo contém quatro classes de ocorrências que são calculadas em todos os nós:
-
Atendimento das seções. Isso calcula o próximo veículo a entrar no nó (saindo do servidor de fila no fim da seção). Isso é feito aplicando o modelo de cedência se necessário, e usando os tempos de saída da seção calculados pelos modelos de car-following e lane-changing. Uma vez que um veículo tenha sido identificado como o próximo veículo a entrar no nó (sair da seção), a próxima posição do veículo na fila é atualizada.
Ao fazer isso, garantimos que todos os atrasos produzidos pelo congestionamento a jusante sejam propagados para os veículos a montante. A simulação mesoscópica é baseada em eventos, portanto há um evento relacionado a essa ação ou mudança de estado da rede. O evento diz respeito ao próximo veículo a entrar no nó a partir de qualquer uma de suas seções de entrada. Esse evento é chamado de "node event from section".
-
Evento de nó a partir de uma seção. Ao processar a saída dos veículos de uma seção, as ações são:
- Calcular o tempo de viagem veículo-movimento de conversão. Esse cálculo é feito assumindo que mudanças de faixa não são permitidas em nenhuma circunstância dentro dos nós. Portanto, esse tempo de viagem é sempre considerado em condições de fluxo livre.
- Aplicar o modelo de seleção de faixa para determinar as faixas de entrada e saída durante o próximo movimento de seção. Isto usa o modelo de faixas-alvo válidas.
-
Atendimento de movimentos de conversão. Este servidor calcula o próximo veículo a sair do nó (entrando na próxima seção). Para obter esse veículo, são levados em conta o tempo de saída do movimento de conversão e as condições da seção a jusante do veículo. Depois que um veículo é selecionado, um novo evento chamado "node event from turn" é agendado.
-
Evento de nó proveniente de um movimento de conversão. O processamento da saída de veículos de um nó implica o seguinte:
- Mova o veículo previamente identificado para sua próxima seção a jusante e coloque esse veículo em fila em sua faixa de partida.
- Aplica o modelo de seguimento veicular e de mudança de faixa para calcular o tempo de viagem do veículo, incluindo o atraso devido à mudança de faixa, e calcula o horário mais cedo em que esse veículo chegará ao fim da seção.
Modelo Gap-Acceptance: comportamento não prioritário¶
Em uma simulação mesoscópica, a preferência e a parada são simuladas usando o mesmo modelo de comportamento. É importante observar que, na simulação mesoscópica, os veículos não usam os componentes de aceleração e desaceleração em seu modelo de car-following. Considera-se que os veículos em uma simulação mesoscópica trafegam sempre em sua velocidade-alvo. Essa restrição é importante em todas as situações em que a aceleração e a desaceleração desempenham um papel importante no cálculo do tempo de viagem dos veículos, em particular em todas as situações com sinalização de pare. Portanto, é difícil comparar duas simulações que usam modelos de comportamento mesoscópico e microscópico com sinalizações de pare.
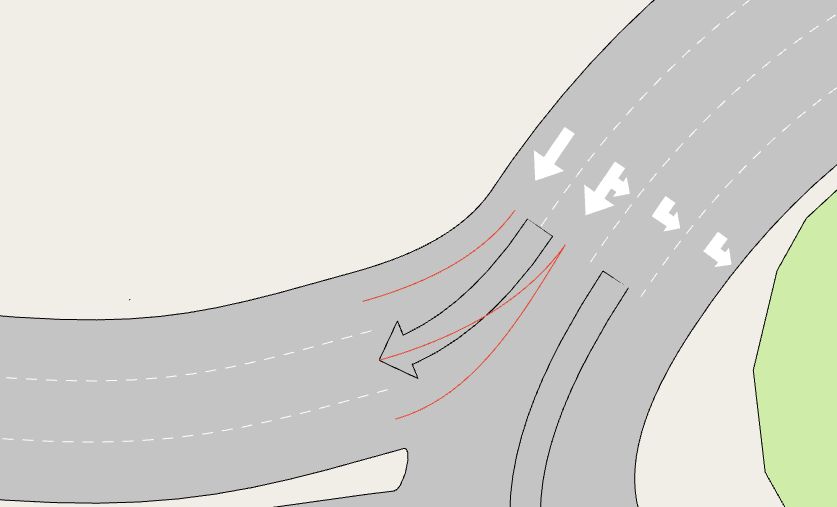
O modelo de yield é usado para modelar comportamentos de yield. Em particular, o modelo é usado ao resolver eventos de nós para decidir qual de dois veículos em um movimento conflitante tem prioridade. As capturas de tela a seguir mostram alguns exemplos de movimentos conflitantes.
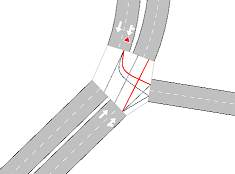
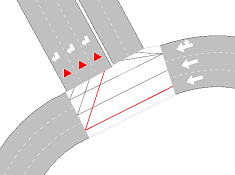
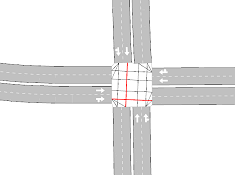
O modelo de prioridade é aplicado somente no primeiro e no segundo exemplos nas capturas de tela anteriores. No terceiro exemplo, os veículos não têm placas de dê a preferência nem de parada obrigatória, portanto o modelo não é aplicado e a regra primeiro a entrar, primeiro a sair (FIFO) é aplicada usando os tempos de demanda de veículos correspondentes. Observe que o tempo de demanda do veículo é o instante em que o veículo está pronto para se mover para o próximo movimento de conversão.
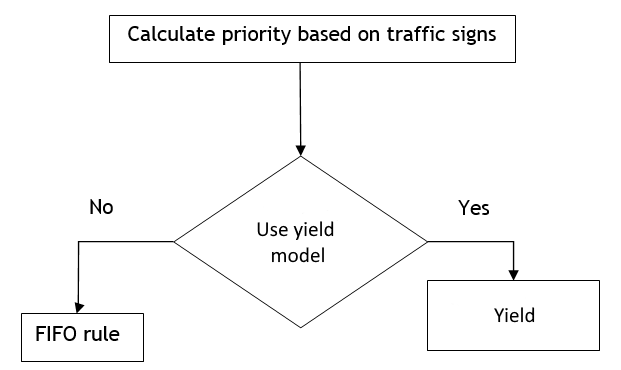
O modelo geral é conforme ilustrado abaixo.
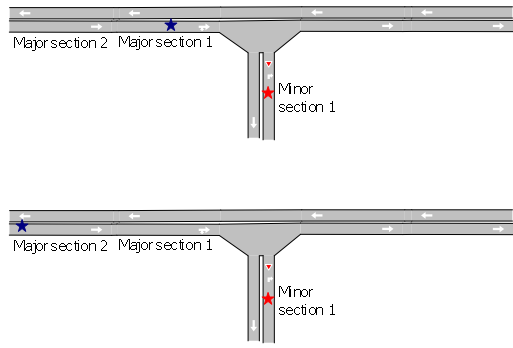
O modelo de preferência usado na abordagem mesoscópica é uma simplificação do modelo de preferência usado pela simulador microscópico. O modelo leva em conta os tempos de demanda dos veículos que estão se aproximando do movimento conflitante. Os tempos de demanda são usados para calcular o gap necessário para que um veículo com restrição de prioridade entre no nó. Na próxima captura de tela, o veículo vermelho deve dar passagem ao veículo azul.
Let \(TD_R\) seja o tempo de demanda do veículo vermelho. Esta é a estimativa de tempo atual para o veículo vermelho entrar no nó. Seja \(TD_B\) seja o tempo de demanda do veículo azul. Esta é a estimativa de tempo atual para entrar no nó com o movimento conflitante.
Se não houver veículo nas seções de entrada imediatas para o nó de conflito, então o modelo procura veículos a montante até que uma distância máxima seja atingida. Na segunda captura de tela abaixo, Major section 1 está vazia, então o modelo observa sua seção a montante, que neste caso é Major section 2. O valor de \(TD_B\) agora leva em conta o tempo de demanda da seção azul na seção Principal 2 e então calcula o tempo de viagem da seção Principal 1, em fluxo livre, para calcular o \(TD_B\). Somente veículos no fluxo principal com trajetórias que estejam em conflito com o veículo vermelho são considerados.
Neste exemplo, se o veículo azul virar à direita em vez de seguir em frente, o veículo vermelho não precisa dar preferência. A distância que o modelo observa a montante pode ser definida no tipo de via ou no editor de movimentos de conversão e é chamada Visibilidade ao longo do fluxo principal: veja o Editor de tipo de via ou Editor de Movimentos de Conversão.
Uma vez \(TD_R\) e \(TD_B\) foram calculados, o gap é (\(TD_B\) - \(TD_R\)). Isso é usado para decidir se o veículo vermelho precisa ceder a passagem ou não. O tempo de espera do veículo vermelho é usado para calcular o gap máximo usando a função na próxima captura de tela. Isso mostra como o gap necessário muda em função do tempo de espera de um veículo. Se o gap estiver na área sombreada em azul, então o veículo vermelho pode atravessar o nó; caso contrário, ele deve parar e não pode entrar no nó.
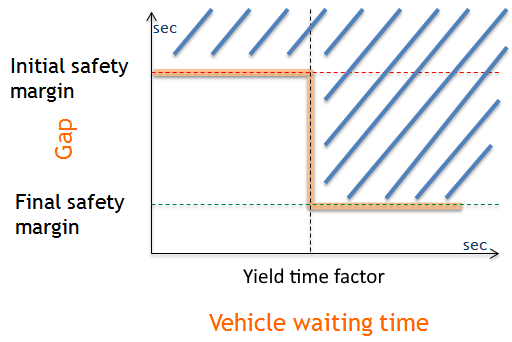
O margem de segurança inicial, margem de segurança final e fator de tempo de cedência pode ser alterado no tipo de via ou no parâmetros do movimento de conversão. Inicialmente, o veículo deve esperar na seção secundária até que haja uma brecha maior que a margem inicial de segurança. Depois de esperar até o tempo máximo de cedência do veículo multiplicado pelo fator de tempo de cedência, a brecha mínima necessária para realizar o movimento é reduzida à margem final de segurança.
Modelo de Seleção de Faixa¶
Este modelo é usado para calcular as faixas de entrada e saída da seção. Conforme descrito no modelo de nó, esses cálculos são feitos durante o tratamento do evento "Node Event from Sections", que ocorre antes de o veículo entrar no movimento de conversão.
seleção de faixa de entrada da seção¶
Cada movimento de conversão tem um conjunto de conexões de movimentos de conversão que descrevem, dentro das faixas válidas do movimento de conversão, a partir de qual faixa da seção de origem é possível alcançar cada faixa na seção de destino.
O simulador mesoscópico distribui os veículos de um movimento de conversão entre as diferentes faixas de entrada na próxima seção, tentando aumentar o headway entre veículos em cada faixa de entrada. Isso significa, no exemplo a seguir, que os veículos vindos da faixa mais à direita e virando à direita permanecerão na faixa mais à direita, enquanto aqueles que viram à direita mas vêm da segunda faixa mais à direita alternarão (em condições de fluxo livre) entre a faixa central e a faixa mais à esquerda para entrar na seção de destino.
O status da próxima seção também será considerado. Para cada movimento de conversão, há uma fila para cada faixa de destino do movimento de conversão (faixa de entrada da seção). A capacidade dessas filas é a densidade de congestionamento da seção de origem multiplicada pelo comprimento do movimento de conversão. Quando houver mais de uma opção, se alguma das opções disponíveis estiver cheia, os veículos se distribuirão entre as demais.
Em algumas situações, como em redes urbanas onde há seções curtas, ou em rodovias onde as seções de entrelaçamento são relativamente curtas, os veículos levarão em conta os movimentos de conversão a jusante em sua decisão de seleção de faixa. Assim, a antecipação também será levada em conta nessa seleção, tanto para a seleção de faixa de entrada quanto de saída. Para a faixa de entrada e saída da próxima seção sob o efeito de antecipação, o modelo de faixas-alvo válidas implementado no simulador mesoscópico usa a mesma abordagem da simulação microscópica.
seleção de faixa de saída da seção¶
A faixa de saída de uma seção é, assim como a faixa de entrada, calculada ao entrar no movimento de conversão anterior.
Quando há múltiplas faixas possíveis, uma penalidade é calculada para cada faixa. A função de penalidade baseia-se no número de mudanças de faixa necessárias para alcançar a faixa de destino e nas densidades observadas em cada faixa da seção. Há duas penalidades opcionais que podem ser definidas para cada seção:
-
Penalizar faixas compartilhadas. Quando esta opção está marcada, uma penalidade é adicionada às faixas que pertencem a diferentes movimentos de conversão.
-
Levar em conta faixas rápidas/lentas. Esta opção favorece tipos de veículos rápidos usando faixas rápidas (as mais à esquerda em um modelo de regra de circulação pela direita) e tipos de veículos lentos usando faixas lentas.
Ambas as penalidades são as mesmas usadas para penalizar o número de mudanças de faixa.
Depois que uma penalidade é calculada para cada faixa, a faixa com a penalidade mínima é selecionada. Se houver várias faixas com a mesma penalidade mínima, a faixa é selecionada aleatoriamente.
Simulação Mesoscópica: Sementes Aleatórias¶
O uso de sementes aleatórias é comum tanto para carregamento de rede microscópico quanto mesoscópico; consulte o seção de sementes aleatórias microscópicas para a descrição e o uso das diferentes sementes aleatórias, gerais e específicas.
Como as diferentes sementes aleatórias estão disponíveis tanto em meso quanto em micro, elas também podem ser aplicadas em híbrido meso-micro.
Entradas e Saídas de Rampa Mesoscópicas¶
Para modelar rampas de entrada e rampas de saída, a simulação mesoscópica divide a seção com a rampa em diferentes segmentos. Por exemplo, a seção viária a seguir tem dois segmentos internos; o primeiro segmento tem três faixas e comprimento de 100 metros, e o segundo segmento tem duas faixas e 300 metros de comprimento.

Internamente, isso é traduzido como duas seções com um número diferente de faixas, conforme mostrado abaixo. A faixa mais próxima da rampa terá 2 conexões — de/para a conexão direta de faixa e de/para a rampa.

É muito semelhante, mas não é completamente igual à seguinte geometria:

Aqui, em vez de uma rampa de entrada fazer parte da seção, a rampa de entrada é implementada como duas seções diferentes conectadas por um nó e um movimento de conversão (com algum comprimento). Por definição, todos os movimentos de conversão têm capacidade mínima de um veículo, portanto, neste último caso, os veículos se deslocarão da seção a montante para o movimento de conversão e, então, do movimento de conversão para a próxima seção a jusante. No caso das rampas, entretanto, haverá conexões diretas entre as faixas no segmento a montante e no segmento a jusante, mas sem entidades de movimento de conversão e nó. Em geral, é mais conveniente modelar rampas de entrada codificando-as como no primeiro exemplo.
Para o caso específico de rampas de saída, a faixa a montante que estiver mais próxima da rampa no segmento a jusante terá 2 conexões e distribuirá o tráfego uniformemente entre as faixas de destino (levando em conta a antecipação).
Para o caso específico de rampas de acesso, além disso, há dois parâmetros que você pode usar para calibrar seu comportamento: Cooperation Gap e Merging Gap.

-
Cooperation Gap: É a quantidade de tempo (em segundos) que os veículos da via principal serão forçados a manter como headway sempre que houver veículos da faixa lateral (rampa de entrada) realizando entrelaçamento. Isso visa facilitar a incorporação do tráfego. O único veículo que será atrasado é o veículo na primeira faixa da via principal adjacente à rampa.
-
Gap de Inserção: É o gap mínimo que os veículos na faixa lateral (rampa de entrada) procuram para se inserir na via principal.
Comprimento de Fila Mesoscópico¶
O comprimento da fila em um modelo mesoscópico é o número médio de veículos que têm um atraso, ponderado pela quantidade de atraso que cada veículo experimenta. Em um modelo mesoscópico, um veículo ou se move na sua velocidade desejada, ou fica parado no final de uma seção. O veículo experimenta o atraso acumulado no final da seção. Isso inclui o atraso de outros veículos esperando à frente, de sinais e dos conflitos de movimentos de conversão opostos. Assim, quando um veículo percorre uma seção ou movimento de conversão, o tempo que um veículo permanece no servidor de fila é definido como o tempo gasto em fila.
Estado Inicial Mesoscópico¶
Um estado inicial mesoscópico é diferente do estado inicial microscópico. O estado inicial microscópico contém um conjunto de veículos e esses veículos são inseridos na rede. Em um modelo mesoscópico, o estado inicial armazena o status da rede, as definições e posições dos veículos e as variáveis internas usadas nos cálculos mesoscópicos. Assim, o estado inicial é válido somente se a rede for exatamente a mesma. Qualquer mudança na oferta ou qualquer mudança na definição de transporte público pode invalidar o estado inicial.