Simulador Híbrido Meso–Micro¶
Introdução¶
A modelagem de tráfego é frequentemente usada para modelar sistemas grandes e complexos que exigem diferentes abordagens de simulação em diferentes áreas. A área mais ampla pode ser modelada com dinâmica veicular simplificada, enquanto pequenas subáreas exigem simulação mais detalhada. Barceló et al (2005)discute isso de um ponto de vista metodológico, enquanto Alexiadis (2007) discute isso de um ponto de vista prático.
Um exemplo da necessidade de uma simulação híbrida que combine uma simulação mesoscópica para grande parte da área com uma microssimulação mais detalhada em áreas críticas é mostrado aqui, onde o estudo está focado na área central congestionada, mas os veículos que passam por essa área podem recalcular a rota para evitá-la. Uma análise completa deve incluir o efeito dessa escolha de rota.
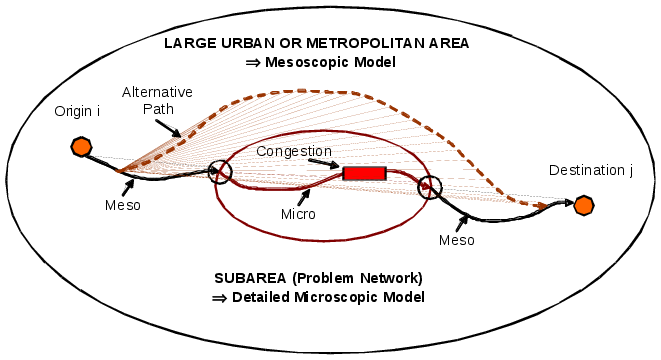
Neste exemplo, a área central congestionada é modelada com microssimulação, enquanto o restante da rede é modelado com simulação mesoscópica. Um veículo que viaja da Origem i para o Destino j é simulado mesoscopicamente até chegar à fronteira do modo de simulação, quando é movido para um modelo de microssimulação antes de retomar o restante da viagem em modo mesoscópico. Como o modelo Mesoscopic do Aimsun Next é baseado em veículos individuais, assim como na microssimulação, uma viagem específica de veículo pode ser modelada em ambos os modos e movida entre modos conforme necessário. Se o veículo entrar na área microssimulada, ele será simulado microscopicamente; se sua escolha de rota evitar essa área, então ele será simulado em modo mesoscópico durante todo o seu percurso.
Crucialmente, a mesma representação de rede e as mesmas informações de fluxo, velocidade e atraso são usadas em ambos os modos de simulação, compartilhadas em um banco de dados comum. As decisões de escolha de rota, por exemplo, são, portanto, consistentes entre ambos os modos de simulação.
Observação sobre licenças: A simulação híbrida meso-micro está disponível em assinaturas anuais do Aimsun Next Advanced ou Expert Edition.
Processo de Simulação Híbrida Meso–Micro¶
Para que um modelo híbrido funcione, o modelo meso e os modelos micro devem trocar informações sobre veículos. Há três classes de informação:
- Atributos e estatísticas de veículos
- Caminhos de veículos
- Condições da rede nos limites.
No Aimsun Next, essas informações são trocadas por meio de dois módulos gerais:
- DTA Server O servidor DTA garante a consistência dos caminhos dos veículos pela rede.
- Simulador Híbrido Garante consistência nos limites. Existem dois tipos diferentes de limites:
- Pontos de entrada representados por centroides: Onde os veículos são gerados usando a distribuição específica de chegadas definida pelo usuário. Consulte o geração de tráfego processo.
- Nós de contorno: Nestes nós de fronteira, os veículos nas seções a montante usam modelos dinâmicos de rede diferentes dos das seções a jusante. Por exemplo, na seção a montante, um veículo é controlado por um modelo mesoscópico, enquanto na seção a jusante o veículo é controlado por um modelo microscópico.
Os nós de contorno movem veículos de um modelo para outro modelo de maneira semelhante àquela pela qual os veículos são gerados por centroides, mas, nesses casos, as filas virtuais representam seções viárias modeladas, em vez das áreas não modeladas fora do limite do modelo.
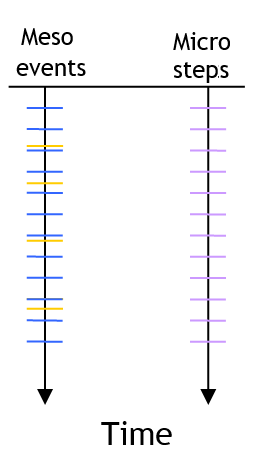
Ambos os modelos também devem ser sincronizados. Como a abordagem mesoscópica usa uma abordagem orientada a eventos e a abordagem microscópica usa uma abordagem de simulação em tempo discreto, um módulo de relógio geral é usado para gerar eventos de sincronização para o modelo mesoscópico que atualizará essa parte da rede. A figura abaixo mostra a sequência de eventos em uma simulação híbrida. O lado micro mostra os passos de tempo da microssimulação. O lado meso mostra os eventos mesoscópicos "normais" em laranja e os eventos de sincronização quando os veículos se moverão na microssimulação em azul.
Modelagem do Movimento Veicular Híbrido Meso–Micro¶
Os veículos se deslocam por áreas meso e micro de acordo com os modelos locais documentados nas seções sobre Microssimulação e Simulação mesoscópica. O fator importante no simulador híbrido é como os limites são modelados.
Meso para Micro¶
Para transferir veículos da área mesoscópica para a área microscópica, o simulador Hybrid do Aimsun Next adota a mesma abordagem usada para decidir se um veículo pode entrar na rede durante uma microsimulação.
O seguinte algoritmo é usado para transferir veículos de áreas mesoscópicas para áreas microscópicas.
If (IsThereSpace) then
t = GetArrivalTime
Schedule a mesoscopic node event from turn at time t
Else
Schedule a revision for space at time t + SimulationStep
Endif
O processo para determinar se há espaço "IsThereSpace" é explicado no Modelagem de Microssimulação: Seção de Entrada de Veículos. A função GetArrivalTime aplica o modelo microscópico de car–following para obter o tempo mais cedo em que um veículo pode entrar na seção. O agendamento de um evento de nó a partir de um movimento de conversão é explicado no Seção do Modelo de Nó Mesoscópico.
Micro para Meso¶
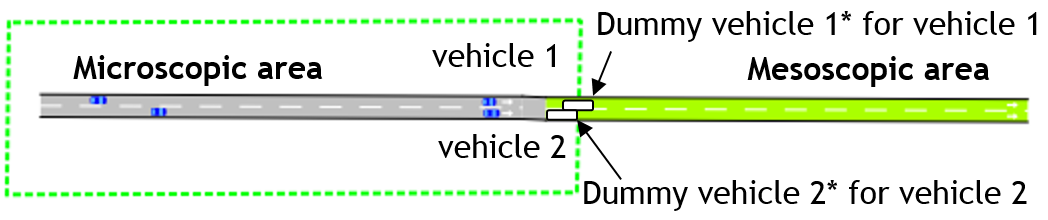
Para transferir veículos da área microscópica para a área mesoscópica, o simulador híbrido do Aimsun Next usa o instante em que um veículo sai do último movimento de conversão microscópico como o tempo de entrada do veículo na primeira seção mesoscópica. Um veículo na área microscópica recebe então um líder na área mesoscópica para que possa aplicar o modelo normal de seguimento veicular e manter um comportamento realista ao se aproximar da fronteira. Portanto, o simulador híbrido cria veículos fictícios cuja velocidade e posição são calculadas com base em um diagrama fundamental triangular densidade–fluxo, usando o procedimento descrito abaixo.
No exemplo, o veículo 1 em uma área microscópica está aplicando um modelo de car-following com o veículo 1* e o veículo 2 está aplicando um modelo de car-following com o veículo 2*.
O algoritmo para determinar a velocidade e a posição dos veículos fictícios primeiro avalia a densidade crítica (\(K_{crit}\)) onde o fluxo máximo é atingido e o fluxo muda de fluxo livre para congestionamento. Esse valor é então usado para determinar se a posição do veículo dummy é calculada a partir dos parâmetros da seção e do veículo ou se se assume que o veículo dummy não tem efeito real ( Speed = velocidade de fluxo livre, Position = ∞ )
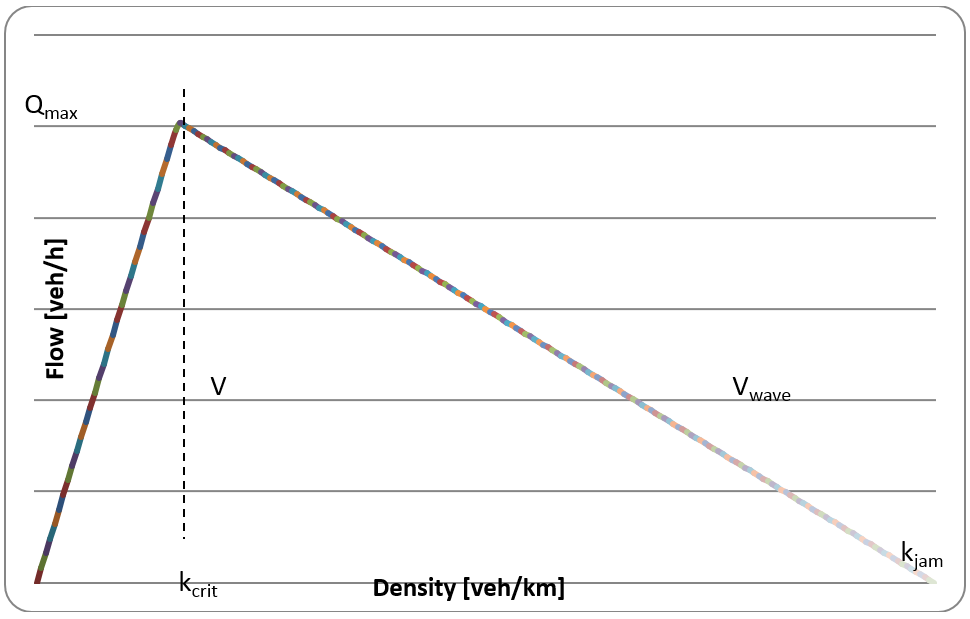
O \(K_{crit}\) o valor é calculado usando a seguinte equação:

em que:
- \(V\) é a velocidade de fluxo livre
- \(R\) é o tempo de reação do veículo
- \(K_{jam}\) é o parâmetro de densidade máxima para a seção definido no Editor de Seções
O algoritmo então usado para determinar a velocidade e a posição dos veículos dummy é o seguinte:
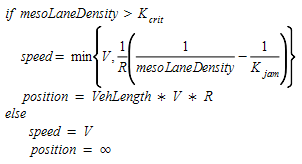
em que
- MesoLaneDensity é a densidade de faixa modelada atual da seção
Áreas de Microssimulação¶
As áreas que devem ser simuladas com microssimulação são criadas com polígonos que são convertidos em Áreas de simulação e são ativados no escopo da microssimulação, que está documentado no Aba do experimento híbrido.
Os comportamentos híbridos são definidos em Editor de Experimento: Guia Comportamento.
Os tempos de reação híbridos são definidos na Editor de Experimentos: Aba Tempos de Reação.