Aimsun Next: Interface SCATS¶
Arquitetura¶
A comunicação ocorre entre o Aimsun Next e o WinTraff. Wintraff é um software que emula a operação de até 250 controladores semafóricos compatíveis com SCATS, desenvolvido pela organização Road and Maritime Services em NSW, Austrália. Essa comunicação entre processos usa um modelo cliente-servidor no qual o canal de comunicação é estabelecido usando sockets (TCP/IP), com o Aimsun Next atuando como servidor e o processo WinTraff atuando como cliente.
Relação entre objetos do Aimsun Next e objetos do SCATS¶
Para garantir a conexão correta entre o Aimsun Next e o SCATS, é essencial que os objetos SCATS, como semáforos e detectores, correspondam aos objetos do Aimsun. Portanto, as regras a seguir devem ser obedecidas para interseções, semáforos, detectores e o plano de controle semafórico.
-
Interseções SCATS: Cada Interseção SCATS deve ser representada no Aimsun Next como um controlador do tipo SCATS.
-
Uma interseção SCATS pode ser representada por uma ou mais interseções Aimsun. O controlador SCATS deve estar conectado a todas as interseções Aimsun que formam a interseção SCATS.
-
SCATS Signal Groups: O modelo Aimsun deve conter a mesma definição de grupos semafóricos que o modelo SCATS, com os mesmos movimentos de conversão associados.
-
Cada detector SCATS deve ter um detector correspondente no modelo Aimsun. O detector modelado deve ter, no mínimo, Contagem e Ocupação como capacidades de medição.
-
Para cada interseção controlada pelo SCATS, o tipo de controle deve ser definido como Externo e um plano de controle pré-temporizado ou fixo fornecido com a definição de todas as fases e suas durações.
Detectores SCATS¶
O SCATS tem dois tipos de detectores:
- Detectores físicos: que medem "count" e "occupancy".
- Detectores lógicos (beacons): identificam Transit Vehicles e são associados a um detector físico e a um conjunto de linhas de transporte público.
Cada detector físico no SCATS (o próprio detector físico ou o detector físico associado a um detector lógico) deve ser modelado como um detector no modelo Aimsun. Se esse detector corresponder a um detector físico, então o detector modelado deve ter, no mínimo, Contagem e Ocupação como capacidades de medição e, se este detector representar um detector físico associado a um detector Lógico, então o detector modelado deve ter, no mínimo, Veículo Equipado como capacidade de medição. Todas as linhas de transporte coletivo associadas a detectores Logical devem ser modeladas como linhas de transporte coletivo com Veículos 100% equipados nos Tipos de Veículos de transporte público.
Observe que o comprimento do detector está fortemente relacionado à Ocupação medida. O comprimento do detector modelado deve ser adaptado para corresponder às ocupações SCATS esperadas.
Depuração¶
A interface SCATS pode ser configurada para produzir informações de depuração. Esta opção é selecionada no Editor de cenários.Quando esta opção está ativa, o Aimsun Next gera arquivos de log armazenados na mesma pasta do documento do Aimsun Next. Os nomes dos arquivos são (onde X representa a porta de comunicação dos controladores).
Saídas adicionais de depuração de um controlador SCATSim podem ser geradas e posteriormente usadas como entrada para um cruzamento controlado por SCATS para reproduzir o mesmo padrão de sinais, sem conexão ao SCATSim. Isso está documentado em Seção do controlador. Esses arquivos de log serão criados na pasta que contém o arquivo ANG do modelo e nomeados prefix + _id.txt onde id é o ID da Interseção SCATS.
Aimsun Next - informações de intercâmbio SCATS¶
O Aimsun Next fornece ao SCATS os dados de atuação dos detectores a cada passo de simulação, e o SCATS responde com as alterações dos estados dos grupos semafóricos, assumindo que, no início da simulação, todos os grupos semafóricos estão em vermelho. Para garantir que o Aimsun Next e o SCATS permaneçam sincronizados, tokens de sincronização são passados entre eles a cada passo de simulação. O SCATS assume que uma transferência de dados é feita a cada segundo e que 1 segundo de dados está disponível a partir do detector. Portanto, o ciclo de detecção deve ser definido como 1 segundo. Se o passo de simulação não for 1 segundo, os dados são enviados assim que possível após o regras de sincronização de dados
Há algumas preferências que podem ser definidas em Preferências das interfaces de controle adaptativo para definir a mensagem de conclusão enviada ao SCATS e se o timeout deve ser desativado.
Definição de objetos SCATS no Aimsun Next¶
A definição dos objetos SCATS especifica um controlador SCATS no modelo para cada SCATS Intersection. O editor Adaptive Controller para um controlador SCATS é mostrado abaixo.
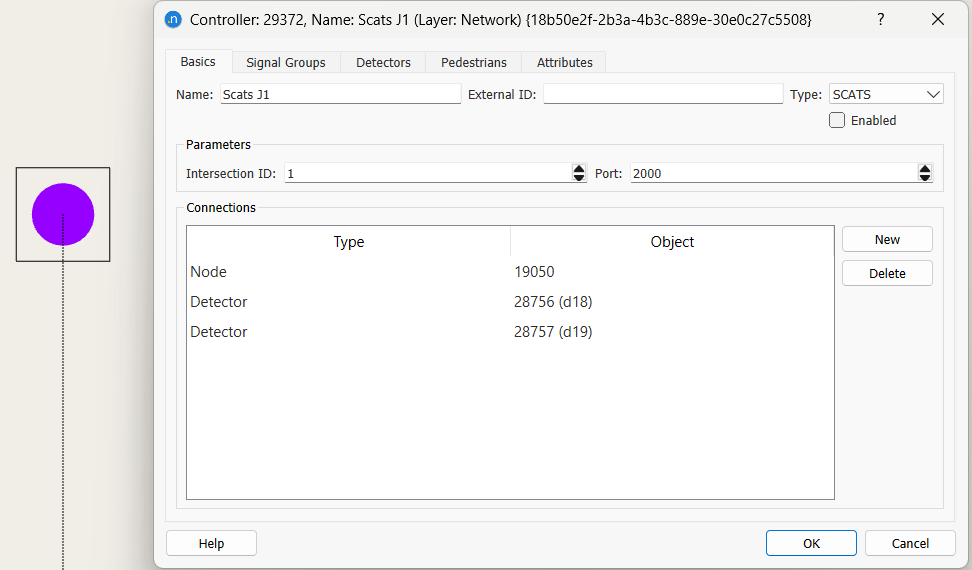
Na aba Básico, as opções são:
- ID da Interseção: O Identificador da interseção SCATS correspondente ao cruzamento vinculado a este controlador.
- Porta: Este número de porta de comunicação define a comunicação entre o Aimsun Next e o SCATS (isso é comum a todos os controladores SCATS).
- Conexões: Define as conexões entre o controlador e os dispositivos sob seu controle. Os links são feitos usando o Novo botão ou o Ferramenta de conexão. Todos os nós e detectores controlados pela Interseção SCATS devem estar conectados.
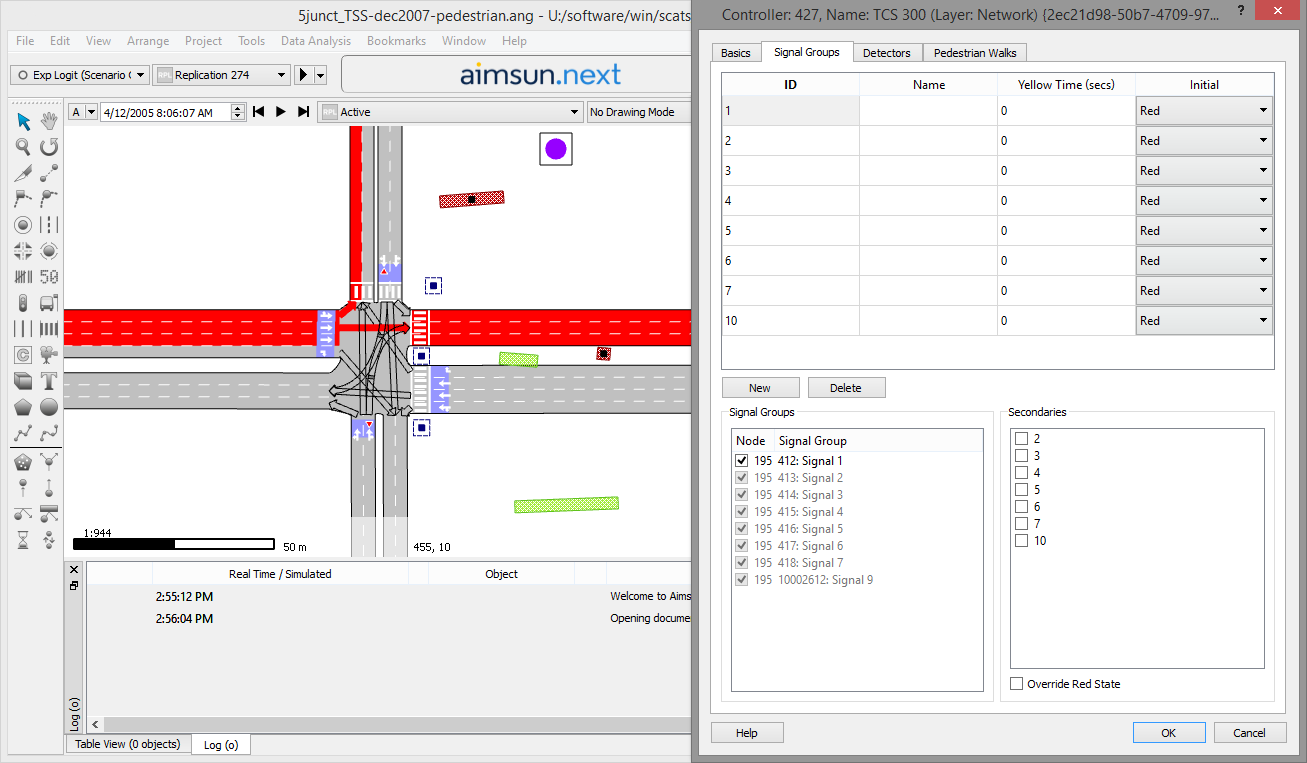
Aba Grupos Semafóricos¶
A segunda etapa é estabelecer como o controlador “vê” os diferentes grupos semafóricos. Cada grupo semafórico SCATS tem:
- ID: é o identificador do grupo semafórico SCATS. Em um controlador, esses identificadores devem ser consecutivos e começar em 1. Esses identificadores determinam a ordem em que o Aimsun Next recebe seu estado, e essa ordem deve ser a mesma que o SCATS tem em sua configuração.
- Nome: é o nome do grupo semafórico SCATS (opcional).
- Tempo de Amarelo: não é usado.
- Inicial: é o estado inicial do grupo semafórico SCATS no início da simulação.
Grupos semafóricos secundários podem ser atribuídos a um grupo semafórico.
Um conjunto de grupos semafóricos do Aimsun pode ser associado a um único grupo SCATS para que possam ser controlados em conjunto. O exemplo abaixo mostra o semáforo com SCATS ID 1 vinculado ao grupo semafórico 1 na simulação.
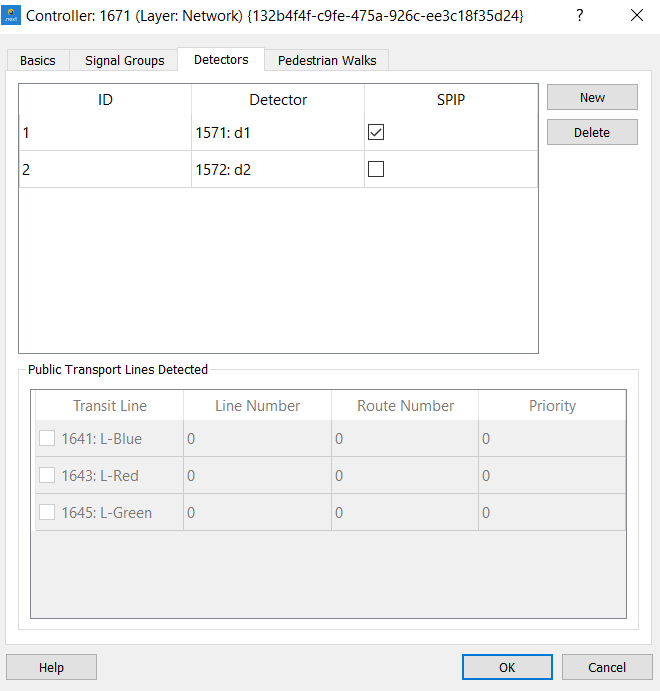
Aba Detectores¶
A terceira etapa é estabelecer os vínculos do controlador com os detectores associados. Para adicionar um novo detector SCATS:
- Clique no Novo botão.
- Defina o ID.
- Selecione um detector na lista de detectores conectados ao controlador.
- Marque a caixa de seleção se o detector estiver configurado como SPIP.
Cada detector SCATS tem como atributos:
- ID: representa o Identificador SCATS. Um inteiro único > 0. Observe que estes não precisam ser números consecutivos.
- ID e Nome do Detector: o detector no modelo associado a este detector SCATS.
- Linhas de transporte público detectadas: define as linhas de transporte coletivo associadas a um detector Logical (um beacon no SCATS; se o detector SCATS corresponder a um detector físico, nenhuma linha de transporte coletivo é selecionada). Nesse tipo de detector, o Aimsun Next então envia as Transit Vehicle Information na mensagem Vehicle Tracking.
O exemplo abaixo mostra um detector com SCATS ID 4 vinculado a "d6", que está destacado na janela de desenho 2D.
Se um beacon estiver associado a uma interseção SCATS (conectada a um conjunto de detectores físicos), então o Beacon Identifier não pode ser igual ao de outro detector físico da mesma interseção. Por exemplo, se a interseção SCATS 100 estiver conectada a um detector físico com 1 como SCATS id, então não é possível ter definido na mesma interseção um SCATS Beacon com 1 como Identifier. Uma solução é criar um controlador SCATS fictício conectado apenas a detectores associados a beacons SCATS, sem uma junção no modelo.
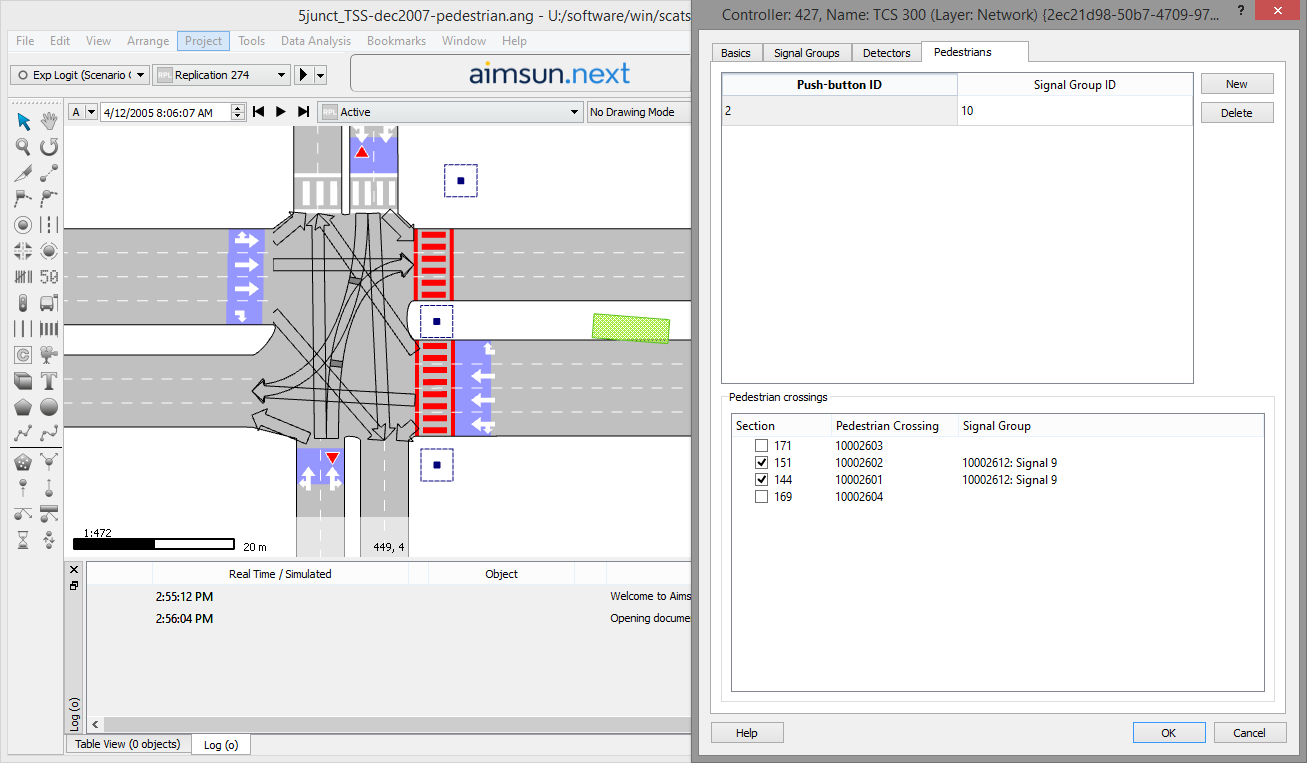
Aba Pedestres¶
A quarta etapa é estabelecer como o controlador ‘enxerga’ as diferentes travessias de pedestres. Para adicionar uma nova correspondência de travessia de pedestres SCATS, clique no botão New e, em seguida, defina o Push Button ID, o grupo semafórico associado a esse push button ID e selecione na lista as travessias de pedestres/áreas de faixa de pedestres associadas a esse botão.
Simulação Mesoscópica¶
O uso do SCATS com o simulador mesoscópico é possível, mas há limitações nas informações dos detectores que devem ser consideradas. Consulte a Emulação de Detector Mesoscópico seção para detalhes.



A figura acima mostra a comparação dos perfis de detecção meso e micro em dois períodos diferentes da simulação (diferentes graus de saturação): 300 veh/h acima e 700 veh/h abaixo.
As seguintes observações podem ser feitas:
- Os primeiros veículos que cruzam o detector no início do verde fazem parte do processo de descarga da fila.
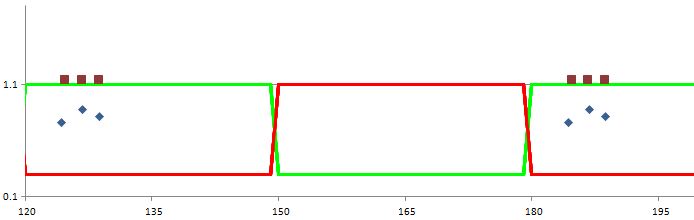
- Durante esse período, a ocupação no micro é maior do que no meso porque, no micro, os veículos aceleram, enquanto no meso eles estão parados ou se deslocando à velocidade de fluxo livre; portanto, no micro, eles cruzam o detector a uma velocidade menor que a de fluxo livre, produzindo ocupações superiores a 0,85 s (partindo de 1,6 s e diminuindo progressivamente à medida que o veículo estava mais atrás na fila, pois teve mais espaço para acelerar), enquanto no meso eles cruzam o detector à velocidade de fluxo livre, produzindo ocupações de 0,85 s. O gráfico comparando a ocupação é mostrado abaixo.
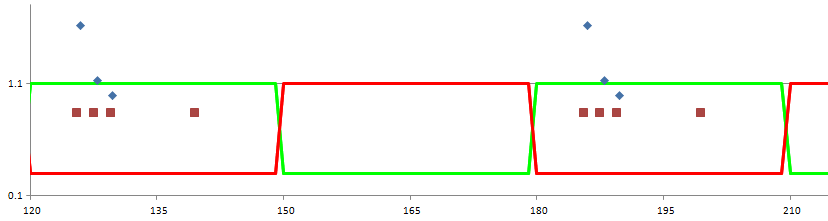
- Durante esse período, o gap no micro é menor do que no meso e aumenta progressivamente até o valor de 1,15 s, que é constante no meso.
- Uma vez dissipada a fila, os veículos circulam em condições não restringidas pelo restante do tempo de verde.
- Durante este período, os perfis de ocupação são exatamente iguais e iguais a 0.85 s porque, em micro e em meso, os veículos atravessam o detector à mesma velocidade, igual à velocidade de fluxo livre.
- Durante este período, o gap é o mesmo em micro e em meso, e depende apenas do nível de demanda (quanto maior a demanda, menor ele é).
- Como neste modelo o detector está no final absoluto da seção e ela é mais curta que o comprimento efetivo dos veículos, apenas um veículo pode ficar parado sobre ele, portanto a ponteamento não é possível, nem em meso nem em micro. Se recuarmos o detector em mais de 0,5 m, então os dois primeiros veículos na fila quando o sinal estiver vermelho ficariam sobre o detector em micro, produzindo ponteamento; no entanto, meso consideraria o detector como colocado no final absoluto da seção e não observaria ponteamento, portanto a diferença entre meso e micro seria maior.
Em situações em que há congestionamento crescente nas seções a jusante do nó SCATS, a emulação de detecção mesoscópica pode produzir perfis de ocupação mais altos em comparação com a simulação microscópica. Isso se deve ao fato de que os veículos no meso pagam o atraso causado pela mudança de faixa a jusante antes de sair da seção onde o detector está localizado. O gap não é afetado, mas a vazão (número de veículos que saem por ciclo) é reduzida. Para reduzir esse efeito, a recomendação é cortar as seções a jusante e calibrar o comprimento das seções que foram cortadas e as distâncias de look-ahead dos movimentos de conversão para evitar mudanças de faixa dos veículos nas seções após as interseções que têm controladores SCATS.