Interface LISA¶
LISA é um pacote de software da SCHLOTHAUER & WAUER GmbH usado para planejar e otimizar planos semafóricos para interseções isoladas e para redes viárias. O controlador semafórico atuado LISA altera dinamicamente os semáforos com base nas ações dos veículos que passam sobre laços detectores nas proximidades dos cruzamentos semaforizados para otimizar os fluxos de tráfego.
Arquitetura¶
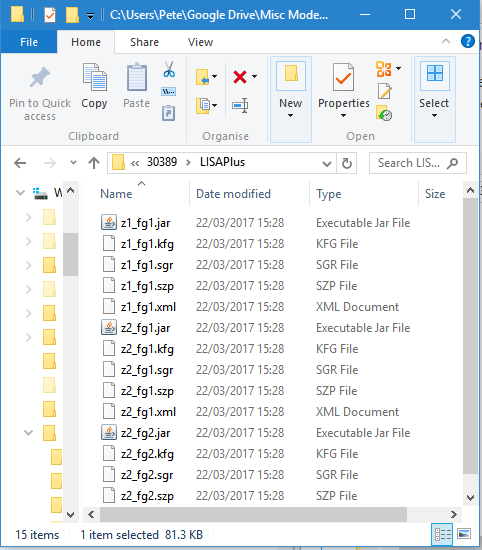
Os arquivos de emulação do controlador LISA são criados pelo LISA e salvos em um único diretório; este contém um arquivo Java ".jar" e 5 arquivos de configuração para cada controlador. Quando a simulação é executada, o LISA OML Server executa esses arquivos e os utiliza para emular o Controlador LISA.
Requisitos¶
Os requisitos são:
- A Extensão de Licença Adaptive Control Interfaces para o Aimsun Next.
- Um Java Runtime Environment versão 8 (1.8.0) instalado no computador que executa a simulação. O instalador para os diferentes sistemas operacionais pode ser baixado em https://www.oracle.com/java/technologies/downloads/ na seção arquivo Java > Java SE 8.
Observe que o LISA não precisa estar instalado para executar a simulação usando o controlador semafórico LISA, pois o LISA OML Server está incluído na instalação do Aimsun Next. No entanto, ele deve estar disponível se o modelador quiser editar os arquivos de controle LISA.
Preferências e Configurações¶
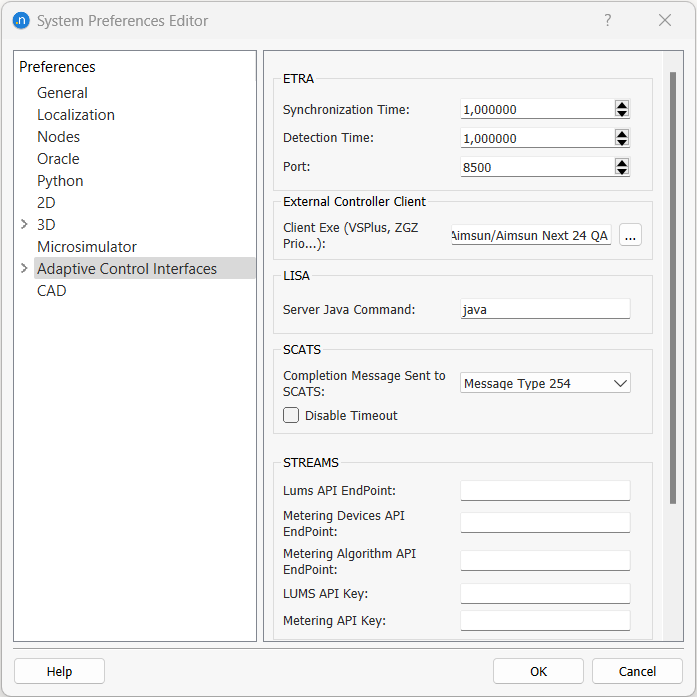
O Server Java Command, definido em Editor de Preferências do Sistema, especifica como iniciar a Java VM que executa o LISA Emulator. Se a Java VM estiver no caminho do sistema e for executada no computador host local, o simples java comando será suficiente. Em outros casos, por exemplo, se a Java VM não estiver no caminho do sistema, ou se houver várias versões instaladas no sistema, o comando deve refletir isso e especificar como iniciar a VM correta, por exemplo, "C:\Program Files (x86)\Java\jre-1.8\bin\java.exe".
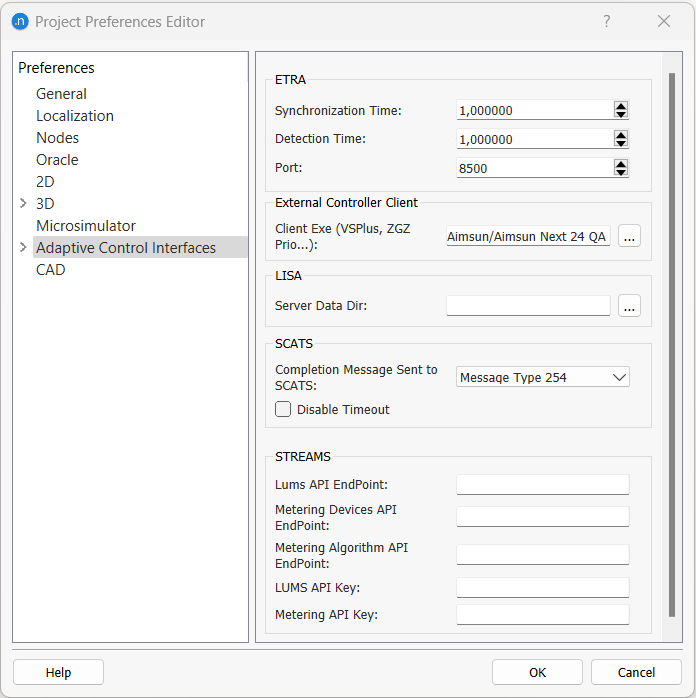
O Server Data Dir, isto é, o caminho para a pasta de arquivos do emulador LISA, é definido em Editor de Preferências do Projeto. Esta pasta é única para todos os controladores LISA no projeto.
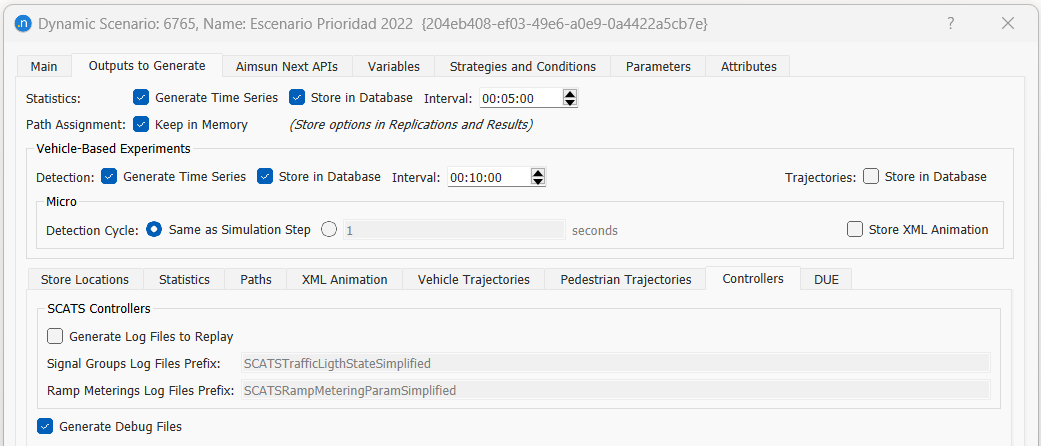
A interface LISA pode ser configurada para produzir informações de depuração. A opção Generate Debug Files é selecionada no editor de Cenário, na aba Outputs to Generate, Controladores subaba. Quando esta opção estiver ativa, o Aimsun Next gerará arquivos de log armazenados na mesma pasta do documento Aimsun Next, nomeados LISAPlusMessages_ID.log onde ID é o ID do Controlador LISA no Aimsun Next.
Editor de Controlador LISA¶
Os grupos semafóricos, os detectores e os botoeiras de pedestres no modelo de simulação devem ser mapeados para os objetos correspondentes no LISA. Isso é feito no editor Controller.
O Controlador é criado e editado usando o Editor de Controladores. Se a opção LISA for selecionada na aba principal, o editor será configurado para LISA.
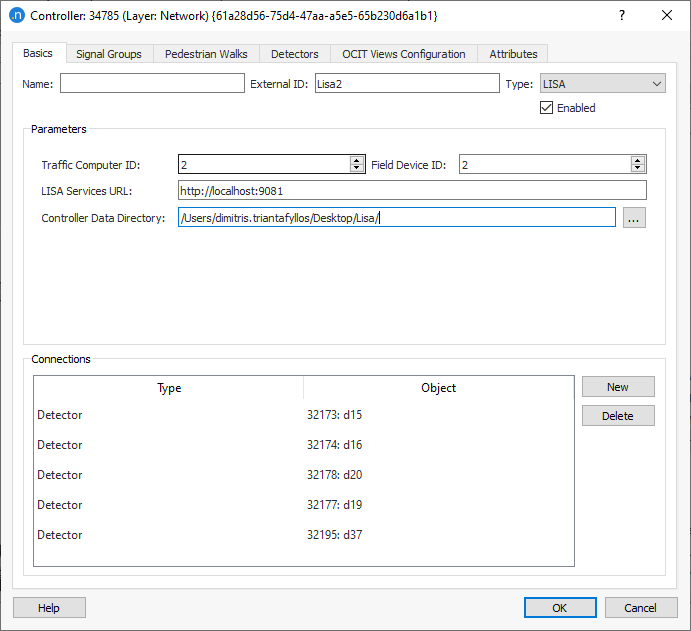
Os parâmetros necessários para vincular ao LISA Controller Emulator são:
-
ID do computador de tráfego e ID do Dispositivo de Campo: estes são identificadores de controladores LISA que devem corresponder aos nomes dos emuladores de controladores exportados do LISA.
-
URL do Serviço LISA: O link (nome do computador e número da porta) para o LISA OML Server. Você não precisa alterar a configuração padrão ao usar aquele fornecido com o Aimsun Next e iniciado automaticamente no início da simulação.
-
Diretório de dados do controlador: Este é o diretório onde são armazenados os arquivos do emulador do controlador de cada interseção (.jar, .kfg, .ov4, .sgr, .szp, .xml) e seus arquivos de configuração. Dessa forma, você pode ter o emulador de cada interseção em uma pasta diferente, que é o padrão ao exportar a partir do LISA, em vez de precisar copiar tudo para uma única pasta. Os nomes dos arquivos correspondem ao Traffic Computer ID e ao Field Device ID do controlador de cada entroncamento e não devem ser alterados.
A caixa Connections lista todos os itens (Nós e Detectores) que foram vinculados ao Controlador usando o Ferramenta de Conexão.
Grupos Semafóricos¶
A aba Signals Group é usada para associar os grupos semafóricos no LISA aos grupos semafóricos adicionados ao nó usando o Editor de nós. Cada grupo semafórico no LISA deve ser associado ao grupo equivalente no nó.
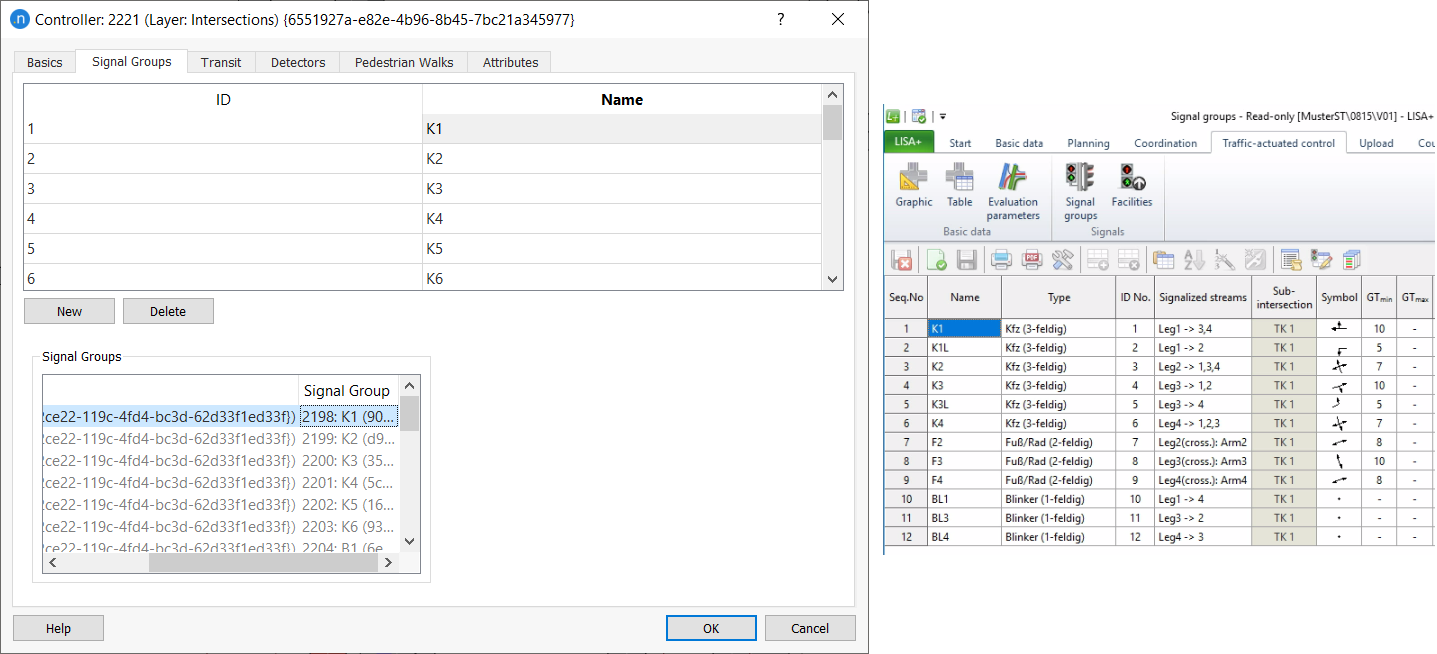
A configuração Secondaries é usada para fazer com que o status de um grupo semafórico siga o de outro grupo semafórico quando apagado (ou até vermelho, se Override Red State estiver marcado). Isso é comumente usado para movimentos de conversão protegidos/permitidos, que são controlados por uma seta verde durante o estágio protegido e, em seguida, durante o estágio permitido, pela bola verde que controla os outros movimentos de conversão da aproximação.
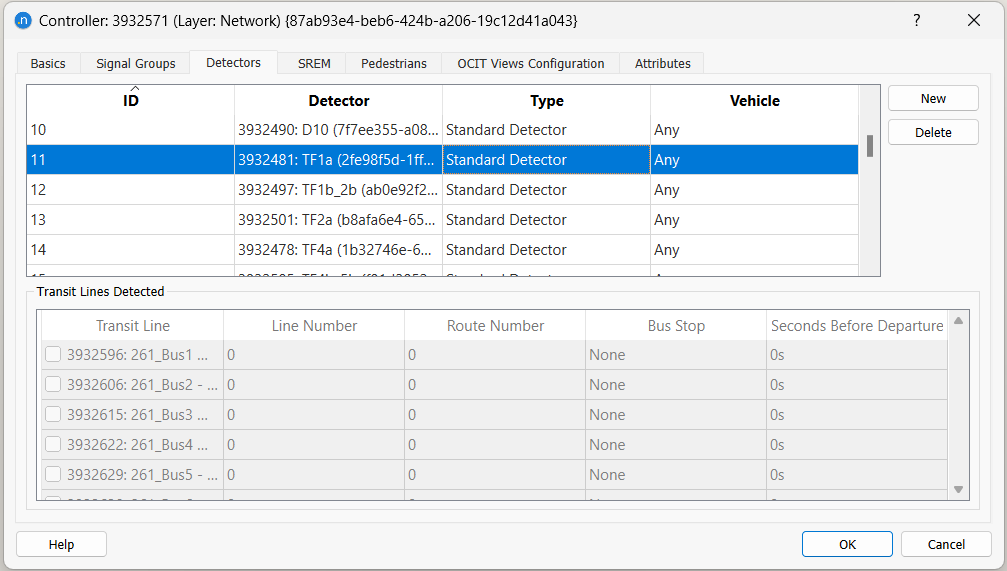
Detectores¶
A aba Detectores do editor de controladores é usada para associar os detectores no LISA aos detectores vinculados ao controlador na aba Principal.
Se um detector estiver associado a uma ou várias Linhas de Transporte Público, ele atuará como ponto de chamada e enviará telegramas OCIT R09 ao controlador sempre que um veículo equipado que atenda essa linha for detectado pelo detector. O conteúdo do telegrama gerado por uma linha (número da linha e número da rota) é definido na aba OCIT da Linha de Transporte Público.
Há vários tipos de detectores LISA:
-
Standard: Este detector funciona como detectores padrão; ele envia presença enquanto um veículo de qualquer tipo estiver sobre ele.
-
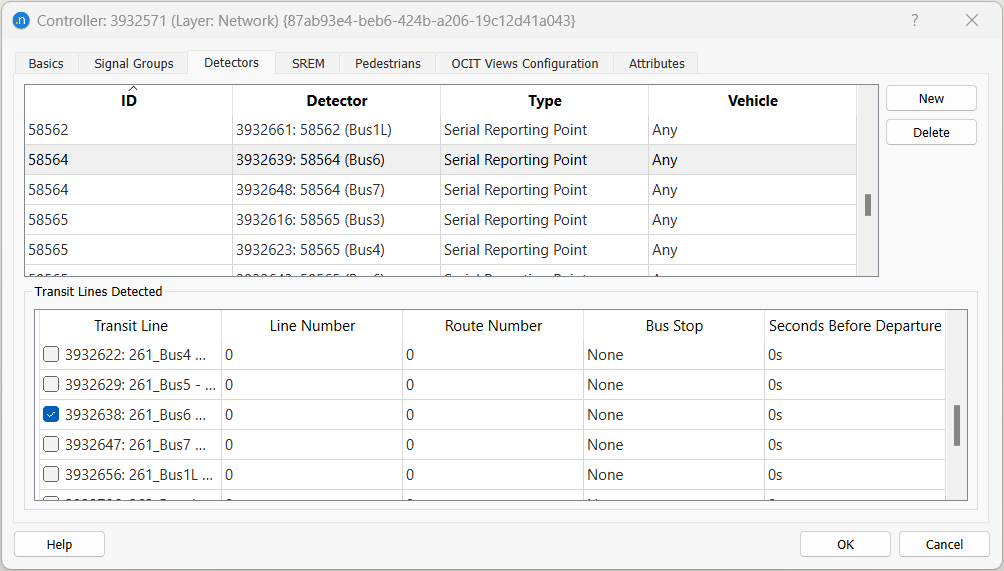
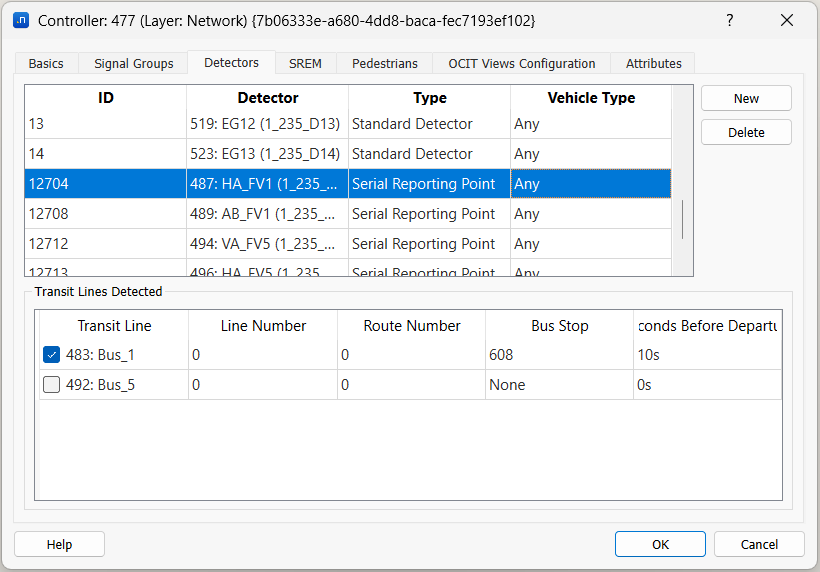
Ponto de Relato Serial: Este detector envia um telegrama de transporte coletivo quando é detectado um veículo de transporte coletivo das linhas de transporte coletivo selecionadas na tabela "Transit Lines Detected".
-
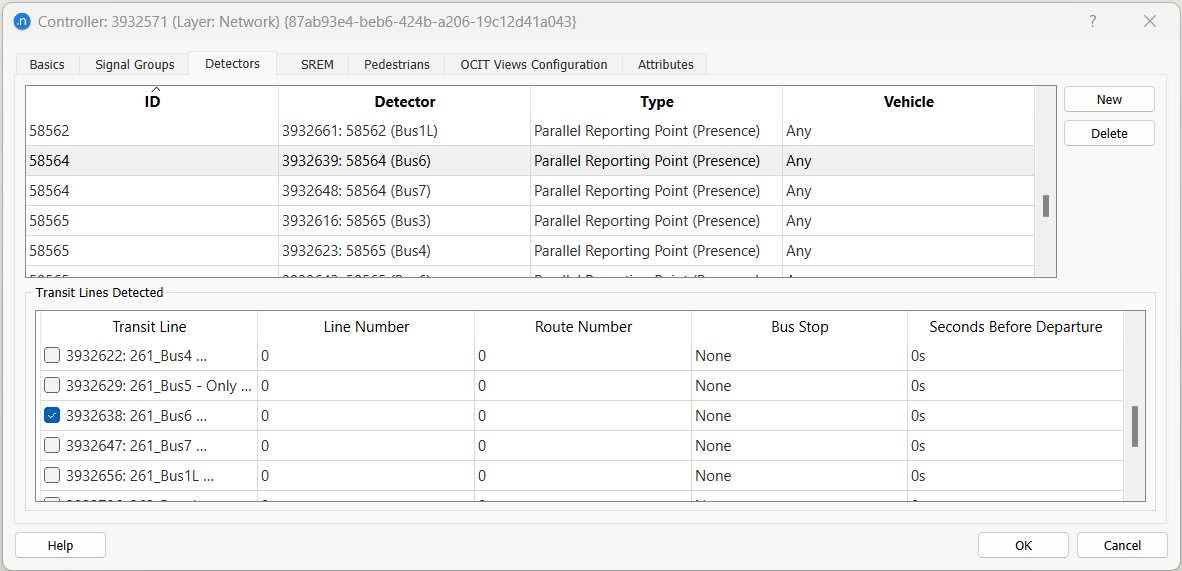
Parallel Reporting Point (presença): Este detector envia um sinal de presença (como detectores) quando um veículo equipado está sobre ele. O detector envia presença enquanto um veículo de qualquer uma das linhas de transporte público selecionadas na tabela "Transit Lines Detected" estiver sobre o detector. Se nenhuma linha de transporte público estiver selecionada, ele deve enviar presença enquanto um veículo equipado de qualquer tipo estiver sobre o detector.
-
Parallel Reporting Point (impulso): Este detector envia um sinal de presença de um segundo (como detectores) quando um veículo equipado passa a estar sobre ele. O detector envia presença quando um veículo de qualquer uma das linhas de transporte público selecionadas na tabela "Transit Lines Detected" passa a estar sobre o detector. Se nenhuma linha de transporte público estiver selecionada, ele deve enviar um sinal de presença de um segundo sempre que um veículo equipado de qualquer tipo passar a estar sobre o detector.
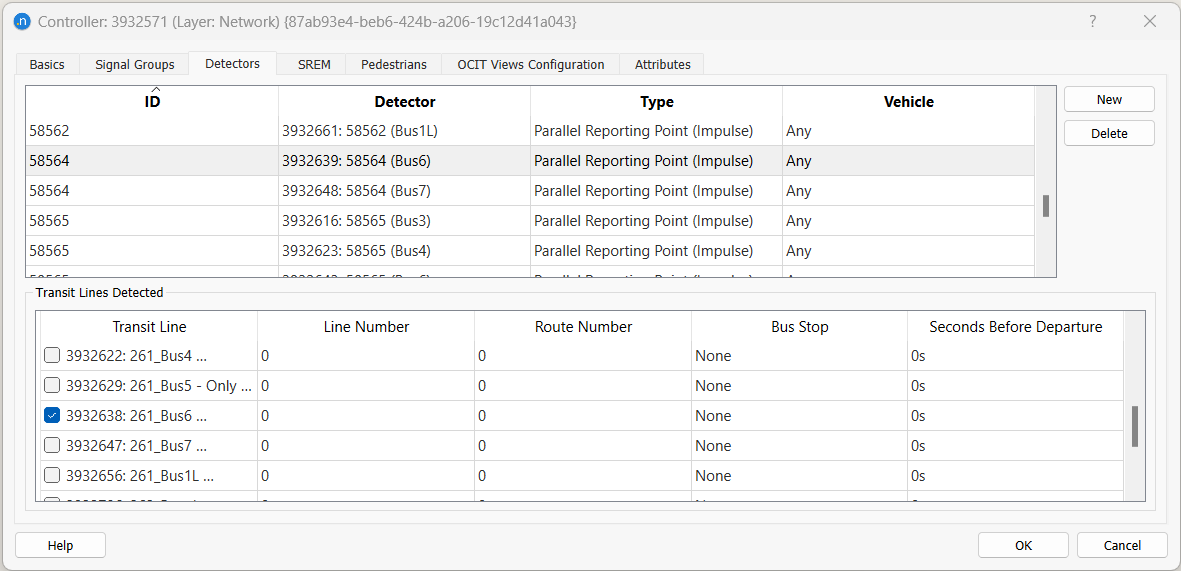
Se o tipo de detector Standard for escolhido, a janela "Transit Lines Detected" fica congelada, pois não há opção para veículos de transporte público enviarem mensagens por meio desse tipo de detector. Se Parallel Reporting Point ou Serial Reporting Point for escolhido, a parte inferior "transit lines detected" é habilitada e as linhas de transporte público podem ser selecionadas. No caso de um Serial Reporting Point, pelo menos uma linha de transporte público deve ser selecionada. No caso de um Parallel Reporting Point, se nenhuma linha de transporte público for selecionada, ele deve enviar presença enquanto um veículo equipado (se houver) de qualquer tipo estiver sobre ele.
Por exemplo, no caso de um veículo de emergência, um detector deve ser definido como Parallel Reporting Point sem linhas de transporte coletivo associadas, e um veículo de emergência deve ser criado como um tipo de veículo (% equipado).
- Número da Linha: O número da linha deve ser inserido na aba da linha de transporte coletivo denominada OCIT.
- Número da Rota: O número da rota deve ser inserido na aba da linha de transporte coletivo denominada OCIT.
- Ponto de ônibus: Se selecionado, a mensagem será enviada quando o veículo partir desta parada de transporte público.
- Segundos Antes da Partida: Se o ponto de ônibus estiver selecionado, uma opção para enviar a mensagem segundos antes de o ônibus partir desse ponto de transporte público.
Para os tipos de detectores Serial Reporting Point e Parallel Reporting Point, as capacidades de medição do detector "Occupancy" e Equipped Vehicle" devem estar marcadas.
Caminhadas de Pedestres¶
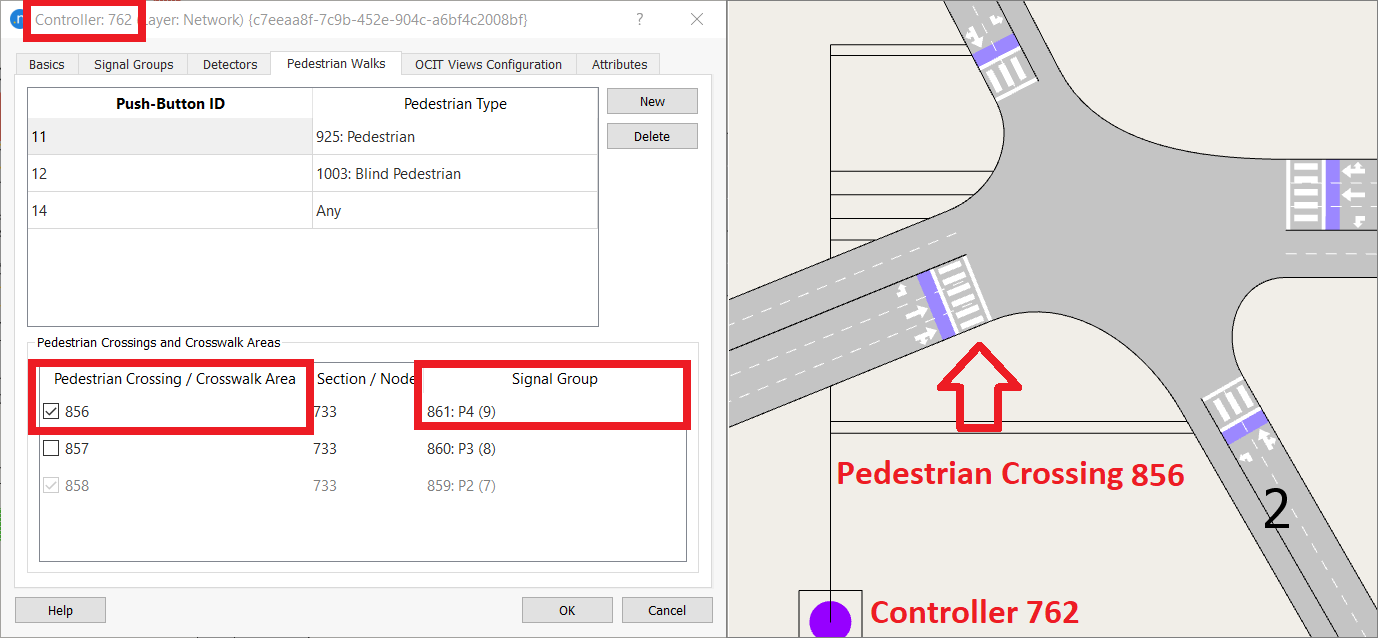
Para permitir a funcionalidade de botoeiras para pedestres, as travessias de pedestres ou áreas de faixa de pedestres no cruzamento controlado devem ser atribuídas a um grupo semafórico no Editor de nós.
Essas Pedestrian Crossings e Crosswalk Areas aparecerão então em Controller Editor > Aba Pedestrians > Pedestrian Crossings and Crosswalk Areas e o usuário pode atribuir cada ou várias Pedestrian Crossings e Crosswalk Areas a um ID do botão de pressão na configuração do Controlador LISA.
Também está disponível a opção de atribuir o ID do botão de chamada a um Tipo de Pedestre específico. Esta configuração determina se a presença deve ser enviada somente quando um pedestre de um tipo específico estiver aguardando, ou para qualquer pedestre de qualquer tipo.
As capturas de tela abaixo mostram como seria configurada uma Travessia de Pedestres/Área de Faixa de Pedestres com um grupo semafórico e dois IDs de botão de chamada diferentes, um para pedestres com deficiência visual (Blind) e outro para pedestres sem deficiência visual.
Configuração de Visualizações OCIT¶
A aba OCIT Views Configuration é usada para configurar o conteúdo da vista gráfica e do visualização de protocolo mostrado no controlador durante a simulação.
Observe que os itens disponíveis na configuração da visualização do protocolo refletem apenas um conjunto mínimo de itens padrão até que você execute a primeira simulação: quando o emulador do controlador LISA é executado pela primeira vez, ele informa ao Aimsun Next quais variáveis definidas pelo usuário (AP Values) estão definidas em sua lógica, e elas serão adicionadas à lista de itens disponíveis. Se o modelo for salvo depois, esses itens serão armazenados no arquivo .ang.
Por exemplo:
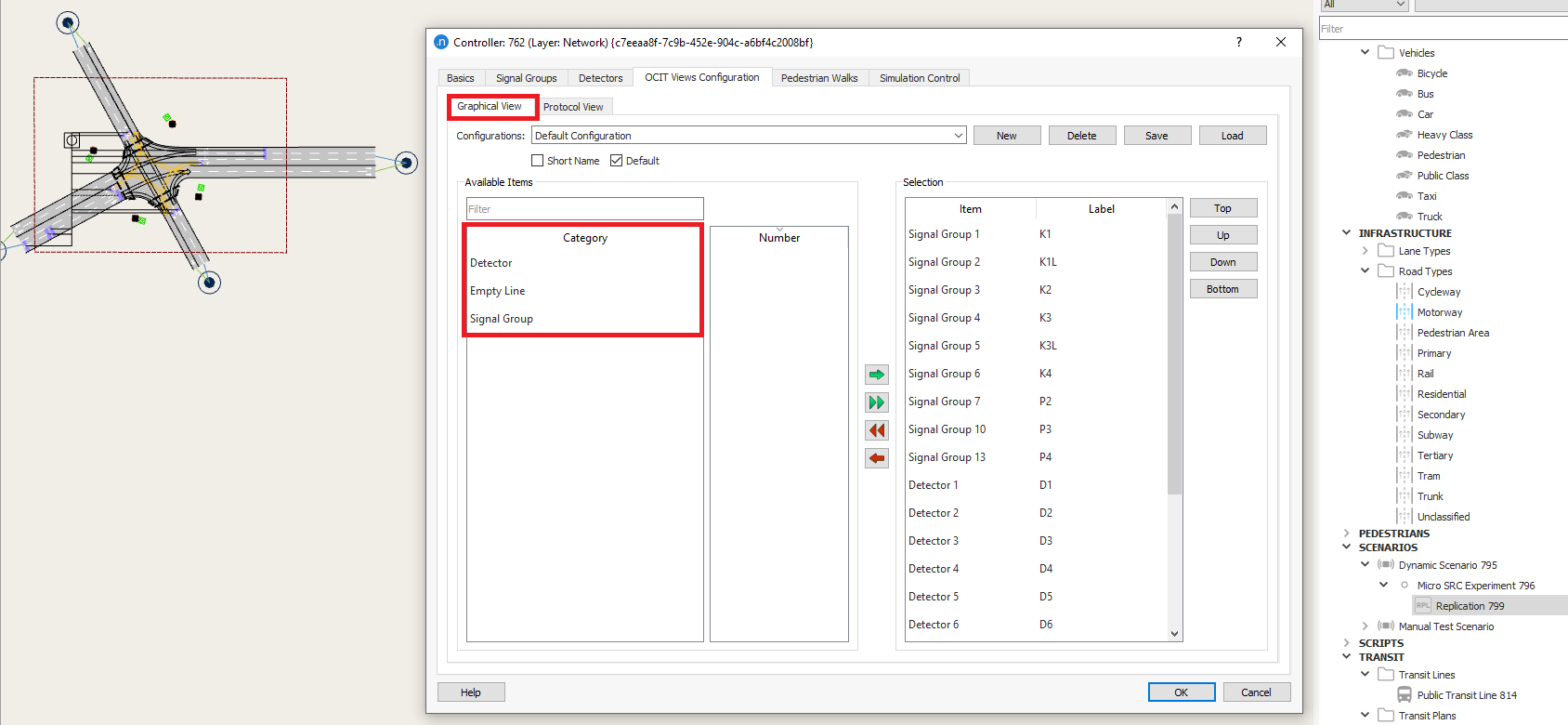
Quando abrimos o arquivo de rede e acessamos o Objeto Controller > OCIT Views Configuration > Graphical View guia pela primeira vez, apenas os atributos padrão sob o Categoria janela aparece até iniciarmos a simulação. Você também pode verificar os atributos em Visualização de Protocolo aba.
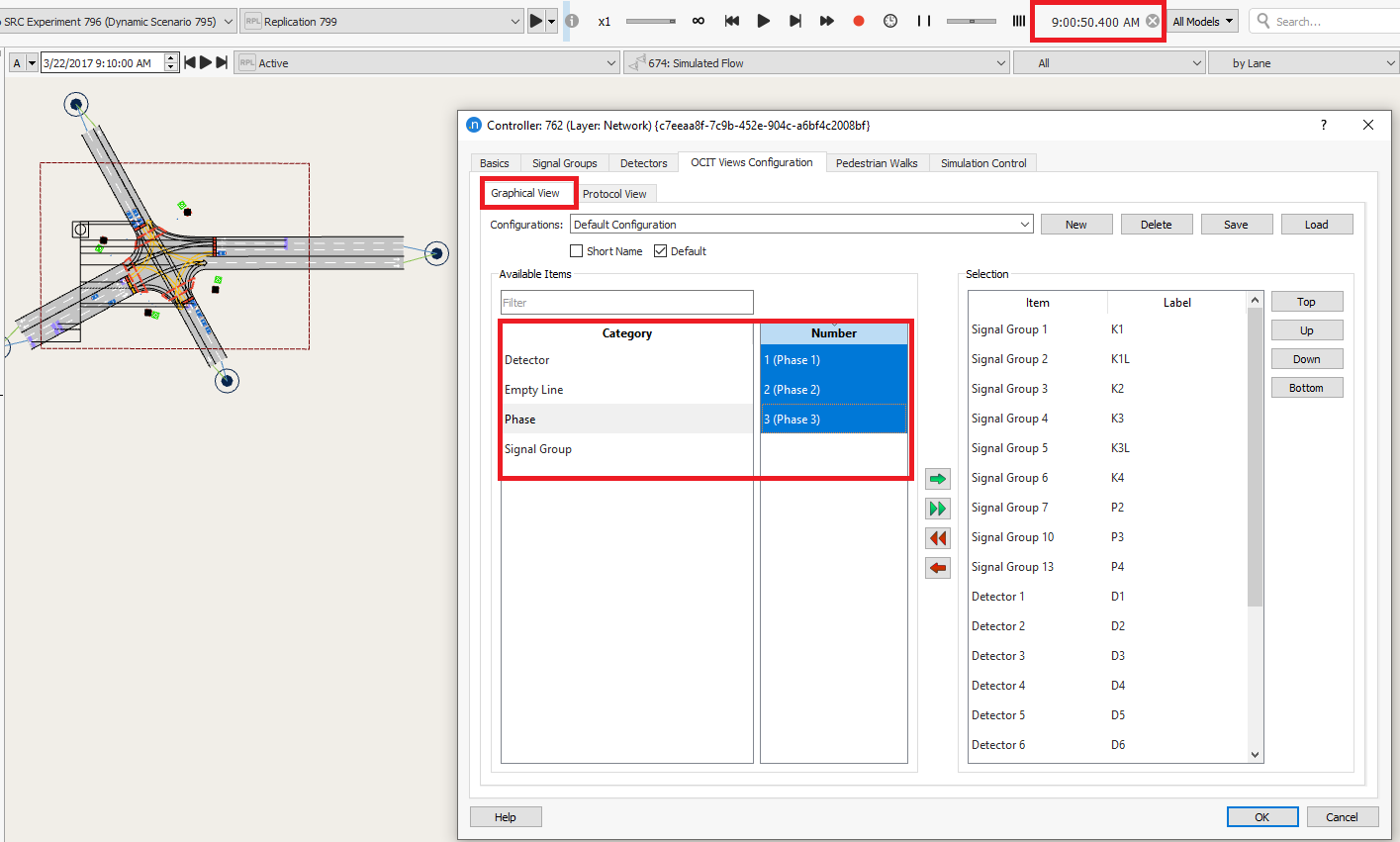
Quando executamos a simulação pela primeira vez, os atributos foram lidos e aparecem sob o Categoria janela, ou seja: Fases.
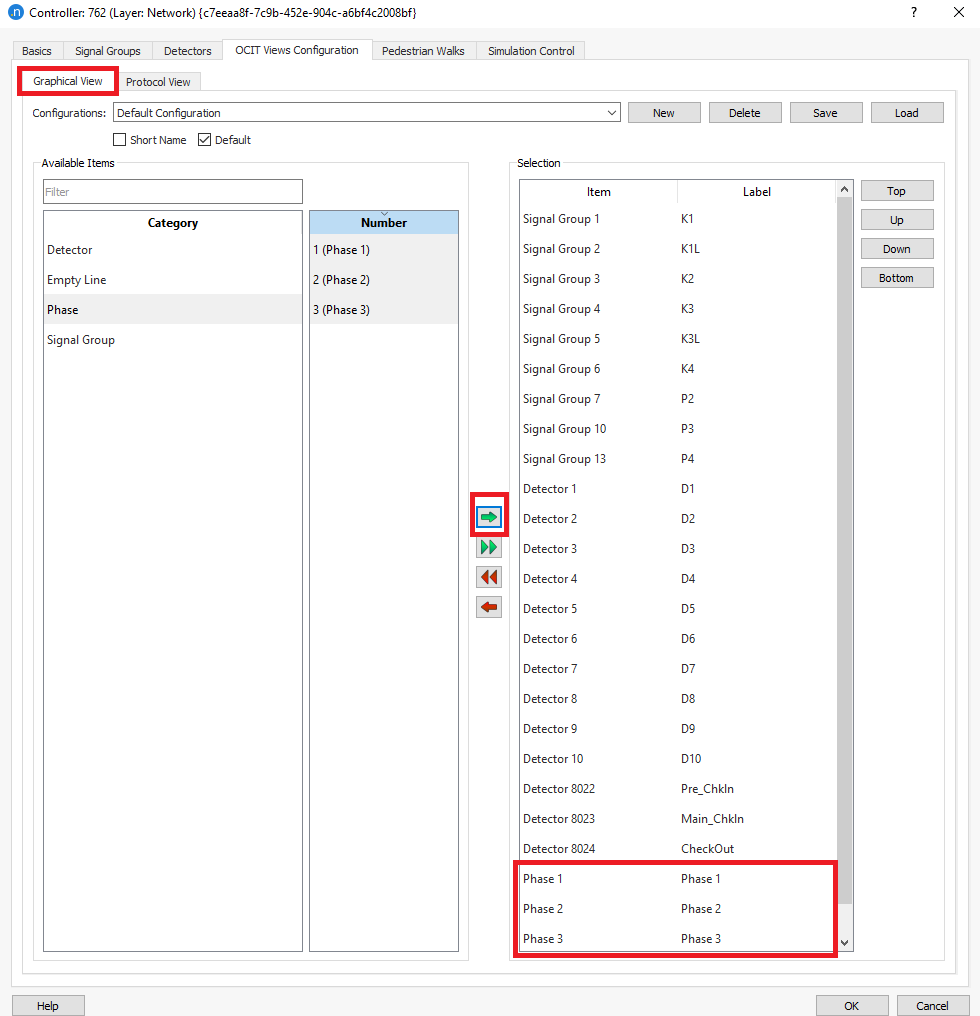
Esses atributos podem então ser selecionados para serem visualizados no Controle da Simulação aba.
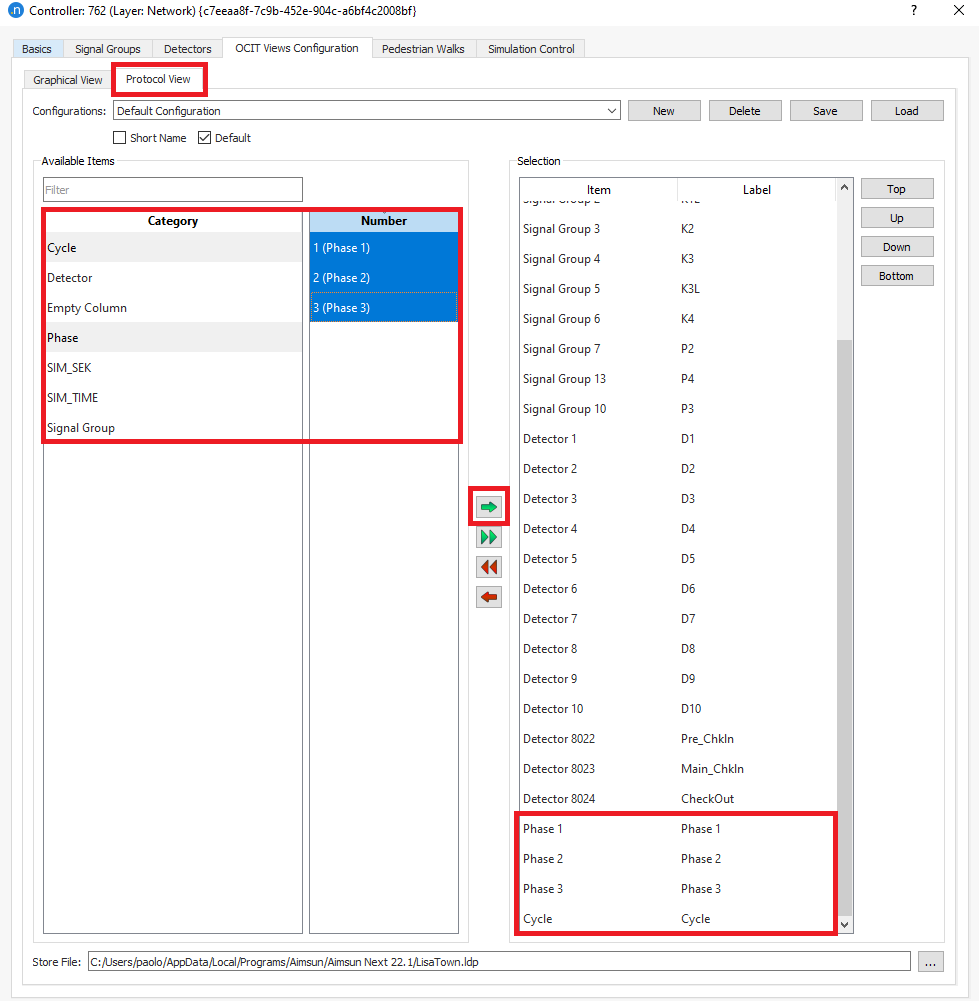
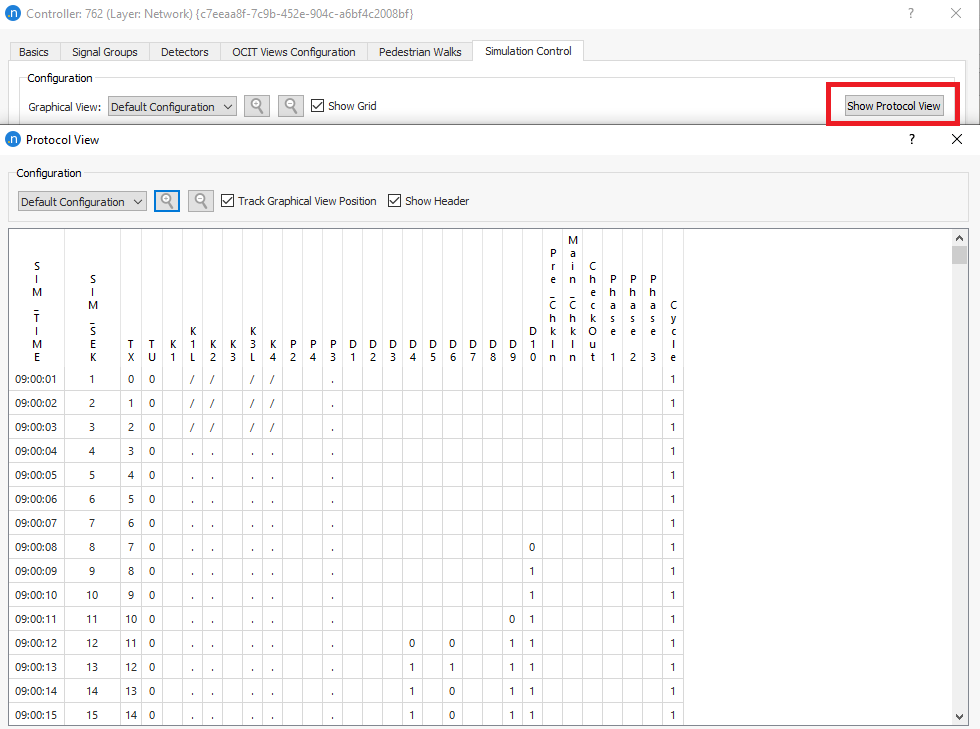
e selecionando os atributos a serem exibidos no Visualização de Protocolo:
Acessando o Controle da Simulação aba, esses atributos aparecerão em Vista Gráfica.
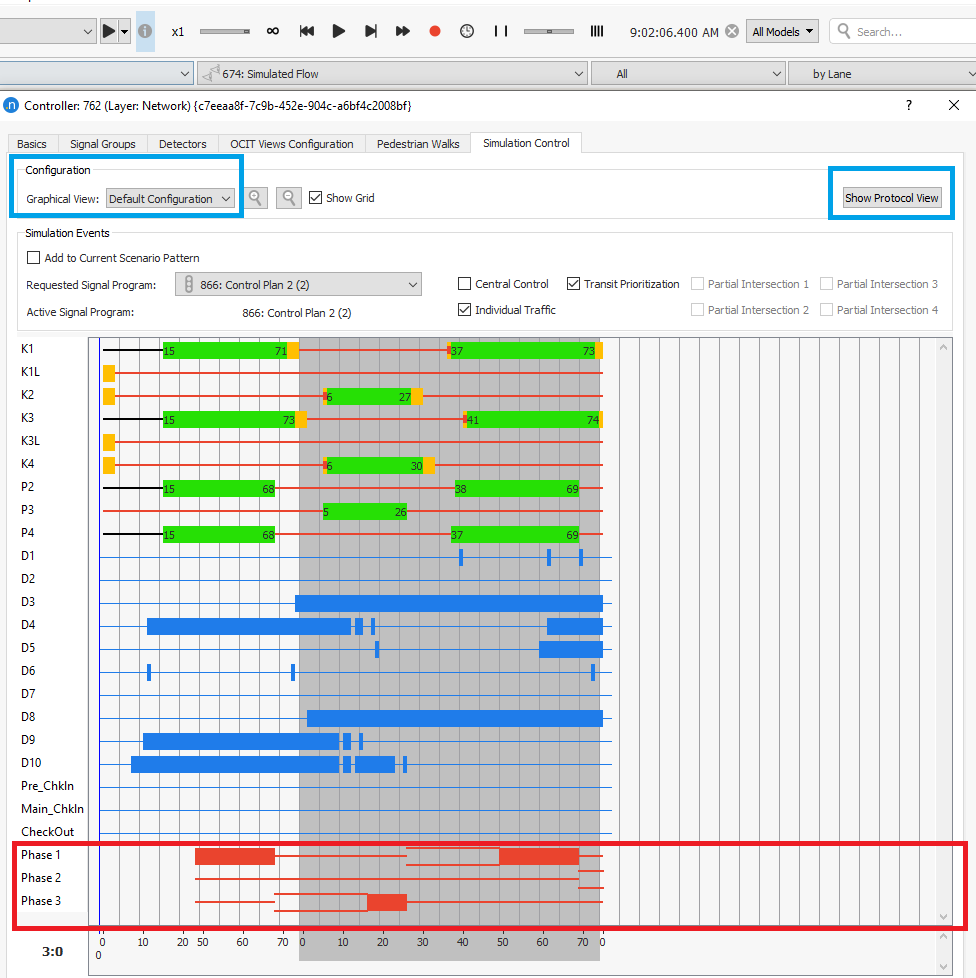
Ao clicar no Visualização de Protocolo vemos também os novos atributos selecionados.
Os atributos a serem exibidos no Visualização de Protocolo aba pode ser configurada da mesma forma. A quantidade de atributos que aparecem o Categoria janela depende das informações trocadas entre o Aimsun Next e o Lisa (arquivos exportados).
Executando uma Simulação com um Controlador LISA¶
A simulação pode ser executada a partir da replicação normalmente, e a janela de log mostrará quaisquer mensagens relevantes para confirmar a operação do link LISA.
Quando a simulação é executada, a VM java é iniciada e os semáforos são colocados sob Controle LISA. Se a comunicação falhar, por exemplo porque o controlador não está configurado corretamente, os semáforos ficarão congelados.
O programa semafórico solicitado é o ID externo do Control Plan carregado de acordo com o Master Control Plan. As flags OCIT (Central Mode, Individual Traffic and Transit Prioritization) que devem ser aplicadas ao Control Plan são definidas no Master Control Plan. Observe que, com LISA, Central Mode ativa e desativa a coordenação, e ligar e desligar interseções parciais não é suportado.
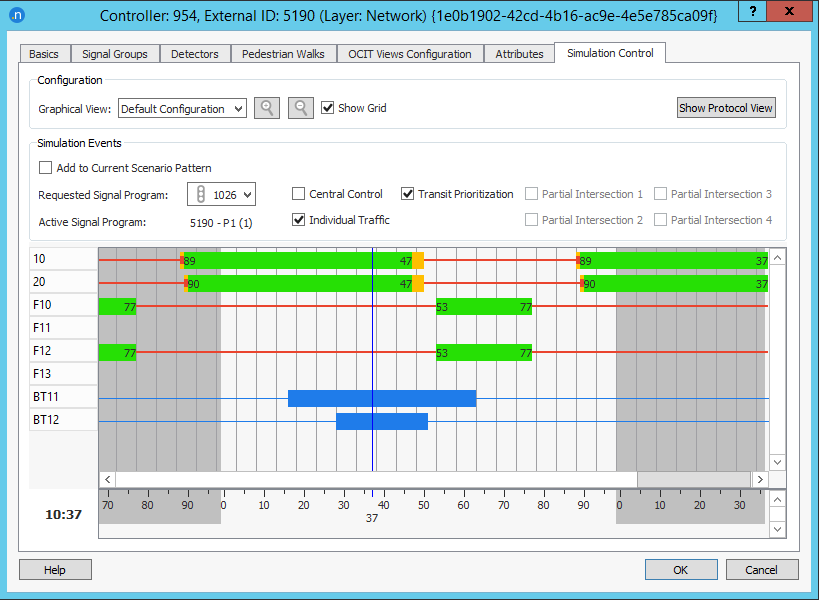
Durante e após a simulação, a aba Simulation Control do editor do controlador pode ser acessada para ver a visualização gráfica e de protocolo. O menu suspenso Requested Signal Program e as caixas de seleção à sua direita podem ser usados para alterar interativamente as flags OCIT.
Atuações manuais podem ser acionadas criando um OCIT Detection Pattern Template. Associar um OCIT Detection Pattern ao cenário permite armazenar as atuações dos detectores e quaisquer alterações no programa semafórico solicitado e nas flags OCIT que sejam realizadas pela janela Simulation Control.
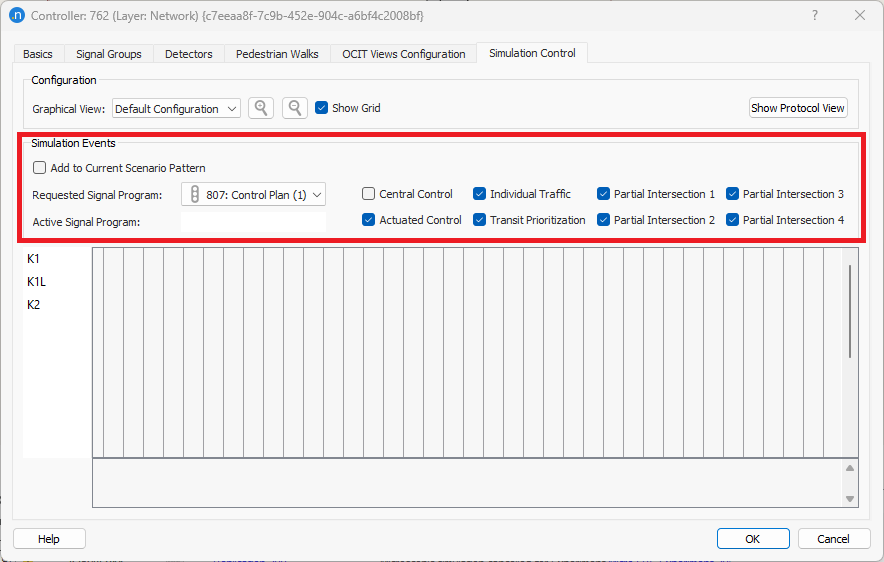
Para realizar testes, o usuário pode aplicar modificações manualmente com a opção "Simulation Events" (em tempo real) durante a simulação, quantas vezes desejar, por meio do objeto controlador. Os eventos de simulação permitem que o usuário modifique o plano de controle e outras flags durante a simulação (visíveis somente durante simulações e reproduções). Os eventos de simulação em questão são os seguintes:
- alternar para outro programa semafórico
- ativar/desativar o controle central
- ativar/desativar atuações de tráfego
- ativar/desativar o controle atuado
- ativar/desativar a priorização do transporte público
- ativar/desativar interseções parciais
Depois que a simulação for iniciada, abra o objeto Controlador > Aba Controle da Simulação. Modifique o Programa Semafórico Solicitado para definir um plano de controle e ativar/desativar manualmente as flags OCIT correspondentes (somente durante a simulação). O usuário também tem a opção de salvar essas alterações em um Padrão de Detecção OCIT selecionando o Adicionar ao Padrão do Cenário Atual opção para reproduzir exatamente a mesma simulação com as modificações realizadas manualmente e armazenadas.
Para mais opções sobre como usar eventos de simulação, consulte Padrões de Detecção OCIT.