Ajuste de partida OD estático¶
Algoritmos de Ajuste Estático de Partida¶
O método de ajuste estático de partidas OD foi desenvolvido como uma melhoria em relação ao fatiamento de matrizes mais básico, no qual a demanda dinâmica de tráfego é obtida fatiando o tempo de simulação em vários períodos e, em seguida, cada fatia é ajustada independentemente com o ajuste estático OD. Esse método usado anteriormente funciona bem se os tempos de viagem entre origem e destino forem curtos em relação ao período, mas apresenta um viés no horário de partida para viagens mais longas porque o aspecto do tempo de viagem é negligenciado. O ajuste estático de partidas resolve esse problema levando em conta o tempo de viagem obtido da alocação estática no cálculo da demanda dinâmica de tráfego.
Definição do problema¶
O objetivo é encontrar uma demanda dinâmica x (isto é, fatiada em períodos curtos) que minimiza a soma das distâncias quadradas entre as contagens observadas ŷ e contagens simuladas y para cada período. Com a matriz de alocação A e y = Ax isto pode ser escrito como:
Para construir a matriz de alocação que mapeia a demanda dinâmica para as contagens observadas, são adotadas as seguintes premissas:
- Os tempos de viagem dos links são constantes ao longo do período de simulação.
- A escolha de caminho é constante ao longo do período de simulação.
- A demanda é gerada uniformemente durante cada fatia de tempo em que o período de simulação é dividido.
As seguintes definições são usadas:
- \(x_{0}\) é um vetor contendo viagens para cada origem \(a\) ao destino \(b\): \(x_{0ab}\).
- \(I\) são os intervalos, que podem ser intervalos de partida ou de detecção, dependendo daquilo a que se referem.
- \(D\) é a duração da fatia de tempo (intervalo).
- \(C\) é o conjunto de links com contagens.
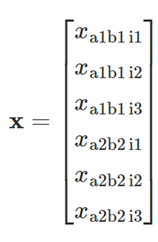
- \(x\) é um vetor contendo proporções de viagens para cada origem \(a\) ao destino \(b\) para cada intervalo de partida \(d\): \(x_{abd}\).
- \(ŷ\) é um vetor que contém contagens observadas para cada link \(c\) para cada intervalo de detecção \(e\): \(ŷ_{ce}\)
- \(y\) é um vetor contendo volumes simulados para cada link \(c\) para cada intervalo de detecção \(e\): \(y_{ce}\)
- \(K_{ab}\) é o conjunto de caminhos usados de \(a\) para \(b\).
- \(t_{kc}\) é o tempo de viagem até o link \(c\) usando caminho \(k\).
- \(p_{k}\) é a proporção de uso para o caminho \(k\).
Cada célula da matriz \(A\) pode ser construído com:


em que:

Com base no cálculo da fração da demanda de um par OD que parte no intervalo \(d\) que passa por um ponto de detecção no intervalo \(e\).
Exemplo:¶

Neste exemplo, o tempo para viajar desde a origem \(a\) para vincular \(c\) por caminho \(p\) é 0.75D, portanto 25% da demanda gerada no intervalo 1 passa pelo link \(c\) no intervalo 1 e 75% da demanda gerada no intervalo 1 passa pelo link \(c\) no intervalo 2.
Conservação da demanda¶
O objetivo do ajuste estático de partidas é calcular a demanda dinâmica a partir de uma demanda estática; portanto, é desejável que as viagens OD sejam conservadas e apenas distribuídas no tempo. As equações a seguir representam a intenção de conservação da demanda:

Essa restrição implicaria que as frações de todos os intervalos para um determinado par OD deveriam somar 1, de modo que o fluxo OD fosse preservado. Na verdade, essas equações são adicionadas ao problema, mas não normalizadas para 1; em vez disso, garante-se que as proporções multiplicadas pelo número correspondente de viagens coincidam com o total de viagens da demanda-alvo (Referência ou Inicial). O peso dessas restrições, isto é, quanto esforço o ajuste de partida colocará em tentar manter o número total de viagens por par OD, dependerá de um fator de elasticidade.
Resultado¶
As equações da matriz de alocação e da conservação da demanda são um sistema linear de equações que pode ser prontamente resolvido no sentido dos mínimos quadrados com métodos de solução padrão, como métodos de descida de gradiente. Multiplicando a demanda original pelas frações calculadas x resulta na demanda dinâmica fatiada.
Exemplo¶
Considere a seguinte rede de exemplo para ilustrar o processo.
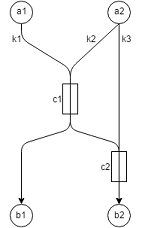
Há dois pares OD; \(a1-b1\) usando caminho \(k1\) e \(a2-b2\) usando 33% do caminho \(k2\) e 67% do caminho \(k3\). Caminho \(k1\) passa pelo ponto de detecção \(c1\), caminho \(k2\) passa por pontos de detecção \(c1\) e \(c2\), e o caminho \(k3\) passa pelo ponto de detecção \(c2\).
Os tempos de viagem são:
- de \(a1\) para \(c1\) usando caminho \(k1\) : 5 minutos
- de \(a2\) para \(c1\) usando caminho \(k2\) : 5 minutos
- de \(a2\) para \(c2\) usando caminho \(k2\) : 10 minutos
- de \(a2\) para \(c2\) usando caminho \(k3\) : 5 minutos.
O tempo de simulação é de 45 minutos dividido em três intervalos de 15 minutos (\(i1\), \(i2\), \(i3\)). Durante esses 45 minutos, 1000 veículos vão de \(a1\) para \(b1\) e 1200 veículos vão de \(a2\) para \(b2\). Finalmente, as contagens observadas para os dois detectores são:
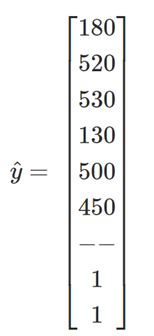
- \(c1\): ( 180, 520, 530 )
- \(c2\): ( 130, 500, 450 )
Então:
e
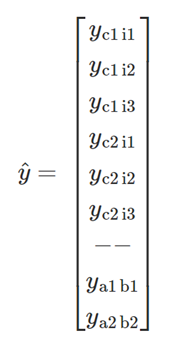
Em que \(y_{a1b1}\) e \(y_{a2b2}\) são iguais a um, refletindo que a demanda deve ser conservada (vamos assumir uma elasticidade de 1, mesmo peso para contagens e para conservação de fluxo, por simplicidade). Agora podemos calcular a matriz A calculando a matriz de alocação e adicionando as equações para conservação da demanda:
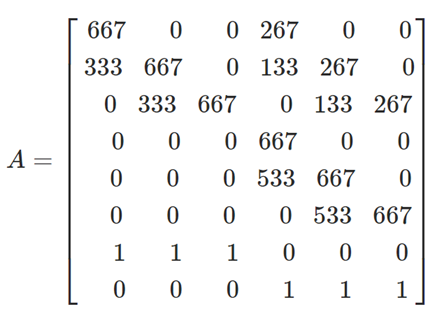
Dados observados + equações de conservação de demanda fornecem:
A solução é então dada por:
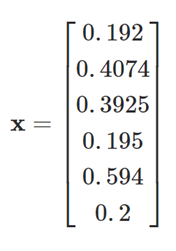
A partir dos quais as viagens OD dinâmicas podem ser obtidas facilmente multiplicando os fatores pelo volume OD original, resultando em:
- \(a1-b1\): ( 192, 407, 393 )
- \(a2-b2\): ( 234, 712, 240 )